 全天時單光子激光雷達技術進展與系統評價
全天時單光子激光雷達技術進展與系統評價
單光子激光雷達(又稱為光子計數激光雷達)具有單光子量級的探測靈敏度,相比于傳統的線性探測激光雷達,能夠獲得更遠的探測距離,已經成為激光雷達探測技術的前沿和發展趨勢。然而,極高的探測靈敏度也使單光子激光雷達在探測中極易受到背景噪聲光子的干擾,這在很大程度上降低了其在白天工作的性能,也極大地限制了其適用范圍。
據麥姆斯咨詢報道,近期,中國科學院空間光電精密測量技術重點實驗室和中國科學院光電技術研究所的科研團隊在《紅外與激光工程》期刊上發表了以“全天時單光子激光雷達技術進展與系統評價”為主題的文章。該文章第一作者和通訊作者為劉博研究員,主要從事激光雷達探測與激光通信方面方面的研究工作。
該文從單光子激光雷達的探測原理出發,簡要回顧了其技術發展,分析了全天時工作對單光子激光雷達探測系統的需求,在此基礎上,采用一種新型的光譜濾波技術,極大地提升了單光子激光雷達在白天的探測性能。同時,還提出了一種普適性的評價模型,能夠極為直觀地對各種激光雷達系統的探測性能進行評價。
單光子激光雷達探測原理
對于激光雷達探測,通用的雷達方程為:
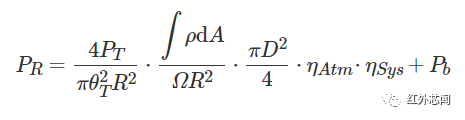
實際探測時,單光子探測器輸出脈沖中既包含有信號光子的響應脈沖,也包含有噪聲光子的響應脈沖,它們混雜在一起,僅通過單次探測無法區分出信號光子脈沖。考慮到每次信號光子脈沖出現的時刻一致(目標距離不變),而噪聲光子脈沖出現的時刻具有隨機性,因此TCSPC的統計方法被用于單光子探測中,通過多脈沖累積來提取出淹沒在噪聲中的回波光子信號。
單光子激光雷達技術發展
1969年,Richard I. Abbot等利用光子計數實現了地球和月球之間的激光測距,之后,多個研究機構都開展了相關研究工作。隨著單光子探測器件以及激光器技術的不斷發展進步,單光子探測激光雷達技術也得到了蓬勃發展,應用領域不斷拓展。從合作目標激光測距到遠距離非合作目標探測,從單點探測到掃描三維成像以及陣列式三維成像,探測精度和分辨率不斷提高,探測距離不斷增大。單光子探測器件也從早期的PMT發展到GM-APD、SNSPD、硅光電倍增管(SiPM)也被稱為MPPC,以及最新的HgCdTe APD,探測性能不斷提升。
2002年,麻省理工學院林肯實驗室首先完成了第一代4×4 APD陣列的單光子激光雷達,隨后發展成為32×32陣列的光子計數激光雷達,目前已經完成領先的256×256陣列的激光雷達。2003年,Richard Heinrichs和R M Marino完成了DARPA資助的Jigsaw計劃外場實驗,該系統激光波長為532 nm,單脈沖能量為4 μJ,接收光學系統孔徑為75 mm,在150 m的距離上實現了空間分辨率為5 cm、距離分辨率為40 cm的光子計數激光三維成像。2012~2013年,美國國家航空航天局(NASA)使用多波束測高試驗激光雷達(MABEL)搭載ER-2飛機在20 km高空進行光子計數推掃測量試驗,波長為532 nm和1064 nm,單脈沖能量為3~5 μJ,獲取了高精度的地表連續高程剖面數據,高精度的云與氣溶膠數據以及植被覆蓋區域的地物、地表高程模型。2018年,NASA發射了IceSat-2衛星,采用光子計數體制實現的多波束星載激光雷達ATLAS作為其主載荷,同時發射了三對六束激光,波長為532 nm,每對間隔3.3 km,沿軌光斑間隔70 cm,測量地形高度變化小于4 mm,脈沖寬度1 ns,激光重復頻率10 kHz,單脈沖能量為25~90 μJ可調。同時期,英國赫瑞·瓦特大學在最遠至10.5 km的距離上獲取了目標的高分辨率三維圖像。
國內也有多個研究團隊在單光子激光雷達探測方面開展了卓有成效的研究工作。華東師范大學吳光團隊一直致力于各種單光子探測技術的發展;中國科學院云南天文臺李語強團隊在碎片等空間目標的單光子探測方面工作突出;中國科學院上海光學精密機械研究所在目標探測、海洋測深等單光子探測應用方面開展了大量工作;中國科學院上海技術物理研究所對于單光子線陣掃描激光雷達及信號處理做了相關研究;青島海洋大學吳松華團隊開展了單光子大氣探測方面的研究;中國科學院光電技術研究所筆者團隊在單光子編碼探測技術以及遠距離單光子目標探測等方面進行了應用探索;中國科學院西安光學精密機械研究所、華中科技大學、哈爾濱工業大學、南京大學、中國科學院國家空間科學中心、西安理工大學等在單光子成像與探測技術方面開展了各有特色的研究工作。中國科技大學潘建偉團隊也開展了單光子探測技術的研究:2020年在新疆完成了最遠202 km的超遠距離單光子三維成像,以單像素189 ms的采集的時間,在夜間最終得到了512 pixel×320 pixel分辨率的圖像,整個掃描時間約為8.6 h,這是目前公開報道的最遠距離的單光子三維成像實驗。另外,北京航空航天大學張漢熠等對于單光子激光雷達系統及相關算法等做了較為詳細的綜述。
隨著單光子激光雷達應用領域的不斷拓展,全天時工作能力成為必然的需求。基于以上單光子探測原理的分析,系統的探測性能主要取決于背景噪聲的抑制能力,具體來說就是降低探測器本身的暗計數以及減少除信號光子外的噪聲光子計數。對于探測器的暗計數,目前幾種主流的單光子探測器都能做到比較低的水平,比如GM-APD一般為幾十赫茲到千赫茲,SNSPD甚至可以達到幾赫茲,相對于白天日光引起的背景噪聲計數率(一般為MHz量級)來說已經可以忽略不計。因此,單光子激光雷達白天探測性能的提升主要取決于對日光引起的背景噪聲的抑制水平。
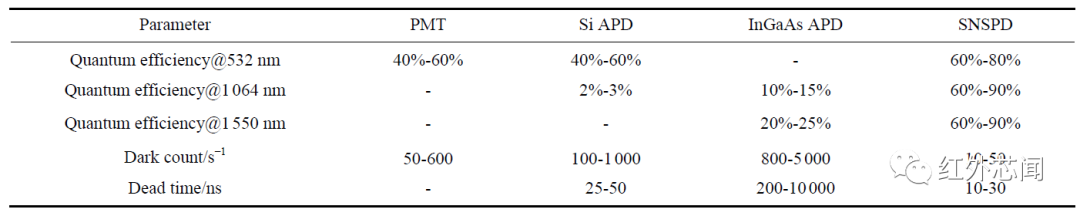
目前,單光子激光雷達一般采用532 nm、1064 nm或1550 nm這三個探測波長,相應的單光子探測器有PMT、Si APD、InGaAs APD、SNSPD幾種選擇,表1給出了幾種探測器的典型參數。
激光雷達系統常用的背景噪聲抑制技術包括空間濾波、時間濾波以及光譜濾波。空間濾波主要是在雷達的光學接收系統中采用有效的視場光闌,盡可能地減小系統的光學視場(FOV),但要注意與發射光束相匹配。時間濾波主要是根據目標大致距離,采用盡可能精確的時間門控,摒棄時間門寬之外的光子信號,而實際上TCSPC本身就是一種十分有效的時間濾波技術。光譜濾波是指以發射激光波長為中心,設置盡可能窄的光譜透過帶寬,從而濾除接收視場內除信號波長外的其他波長成分,以此到達抑制背景的目的。
單光子激光雷達全天時探測能力分析
光子計數激光雷達的噪聲來源主要是背景光噪聲以及探測器本身的暗計數噪聲,由于暗計數噪聲是由器件本身的暗電流產生的,與器件性能有關,這里不作分析。背景光噪聲的主要來源是太陽輻射,因此需要對由太陽輻射引起的、最終到達單光子探測器的噪聲光子進行分析。
為了簡化處理,可以將太陽視作一個溫度為5778 K的標準黑體,利用黑體輻射公式可以準確得到某一波段太陽光譜的輻射能量。得到常用的太陽輻射光譜照度圖如圖1所示。
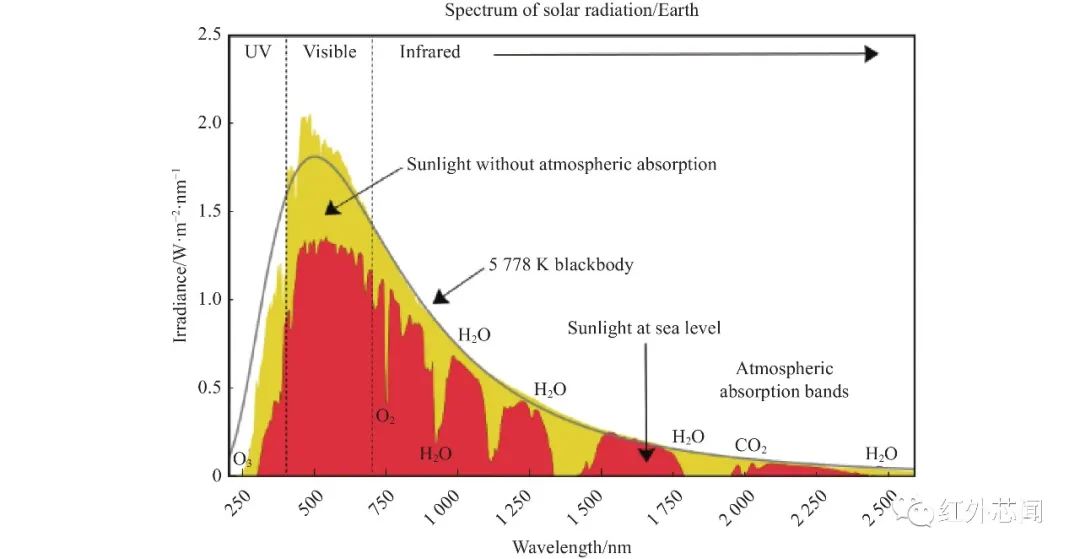
圖1 太陽輻射光譜照度
依據黑體輻射公式和太陽輻射光譜,可以得到某一波長的太陽常數,即日地距離上,大氣層頂垂直于太陽光線的單位面積在每秒接收到的太陽輻射功率,其隨波長不同而變化。在確定激光雷達系統探測波長后,根據系統的光譜濾波帶寬以及該波長太陽常數即可計算出該波段范圍內的太陽光譜輻射功率。位于雷達和目標之間路徑上的大氣也會對太陽輻射進行散射,整個路徑上的大氣散射被雷達光學系統接收也會成為噪聲光子,這部分輻射的計算十分復雜,與太陽高度角、目標方位角、路徑大氣消光系數分布等探測時的具體太陽與大氣參數密切相關,難以精確計算。
對于激光雷達用的單光子探測器的選擇,由表1可見,SNSPD探測器在可見到近紅外波段的綜合探測性能上具有明顯優勢,制約SNSPD的條件主要是其系統需要極低制冷溫度(低于4 K),難以實現系統小型化。另外,目前其使用成本過于昂貴,價格約為半導體探測器的10倍以上。不考慮以上因素時,選用SNSPD探測器將顯著提升雷達探測性能,下文不再將其列入對比分析。此外,對于532 nm探測,由于PMT量子效率高且無死時間效應,在不考慮其他因素的情況下也應優先選用,下文也不再將其列入對比分析。
表1 單光子探測器的典型參數(基于主流商用探測器參數,來源廠商包括Hamamatsu、Excelitas、PicoQuant、Laser Components、ID Quantique、Aurea、Scontel、Becker & Hickl等)
為了進行探測性能對比分析,選定10 km距離的擴展目標,按照表2中參數計算不同光譜濾波帶寬時不同波長和探測器的探測概率。
表2 對比分析用雷達參數表
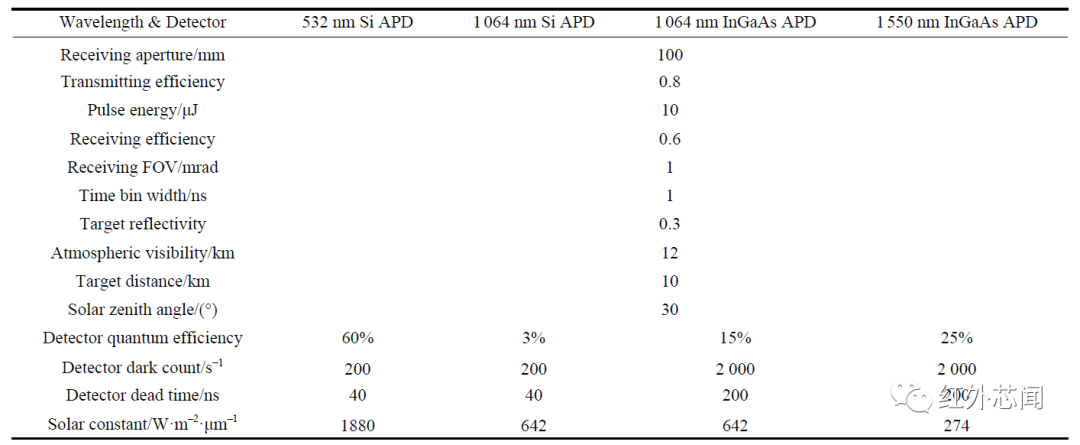
計算中大氣輻射采用LOWTRAN軟件,夏季中緯度地區標準大氣模式,光譜濾波帶寬分別選擇0.5、1、1.5、2 nm,結果如圖2所示。圖2(a)為單次探測概率,圖2(b)為脈沖累積100次、鑒別閾值為10時的探測概率,圖2(a)中還給出了12 km能見度時,10 km距離不同波長的雙程大氣透過率。由圖可見,無論對于哪種波長,光譜濾波帶寬都極為重要,帶寬2 nm以上白天探測概率急劇下降。雖然532 nm的探測器效率很高,但由于大氣衰減以及日光背景較強的影響,其探測性能并不好。而InGaAs探測器由于其死時間過長,導致在強噪聲環境下探測性能不佳,因此,雖然1550 nm波長的大氣衰減最弱,日光背景最低,但其探測性能仍然不佳。綜合來看,白天探測時采用1064 nm波長,Si APD探測器的性能最好,同時光譜濾波帶寬需小于2 nm。
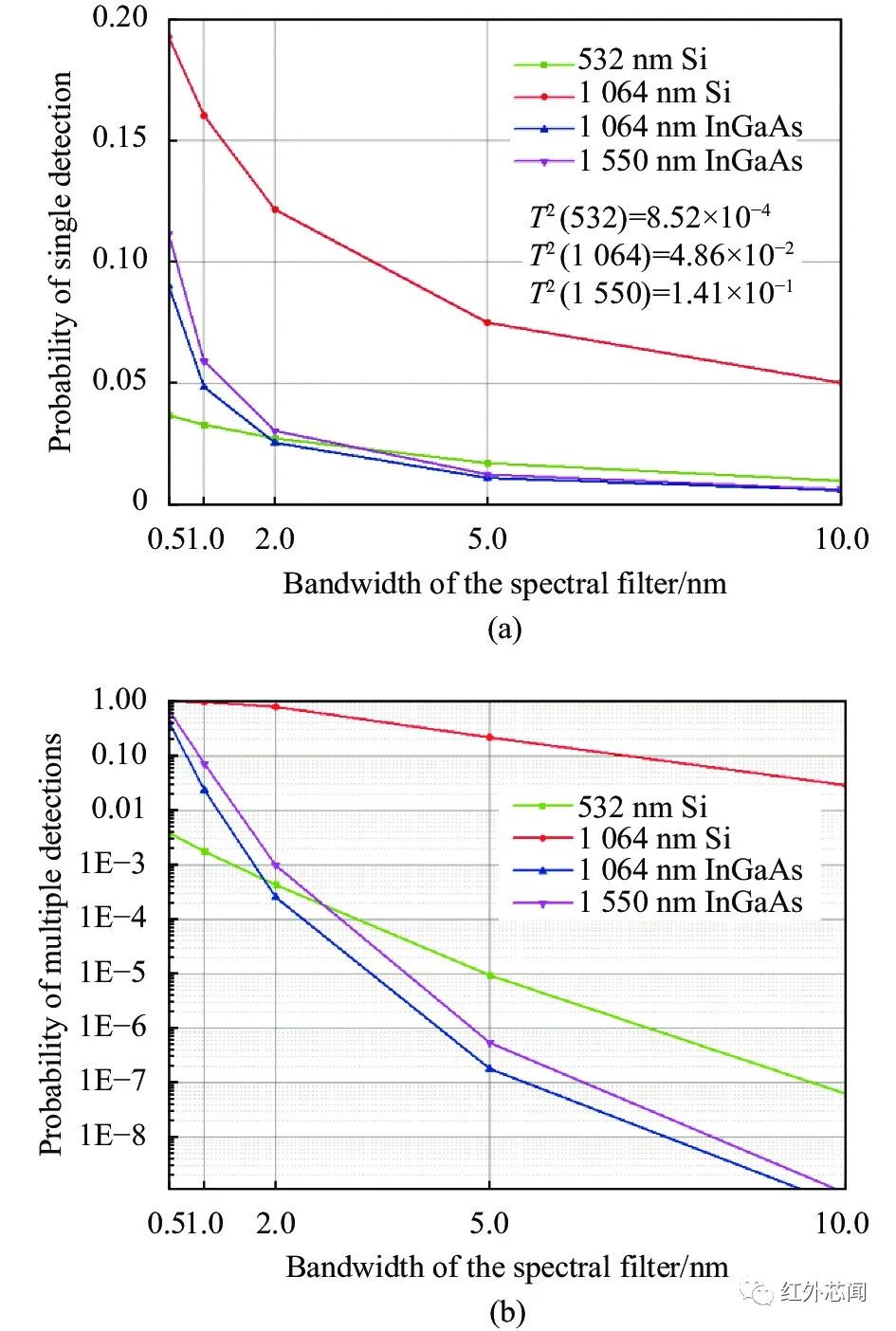
圖2 10 km目標不同光譜濾波帶寬時不同波長和探測器的探測概率
圖3(a)所示為1 nm濾波帶寬,1064 nm波長不同探測距離時,單次探測接收到的目標激光回波光子數(紅色)、目標散射日光噪聲光子數(藍色)和路徑大氣散射日光噪聲光子數(綠色)。圖3(b)所示為幾種波長和探測器在不同探測距離上的單次探測概率,紅色點線為1064 nm、Si APD探測器在夜晚無日光背景下的探測概率。由圖可見,白天受到日光背景噪聲的影響,目標的探測概率并不是隨距離增大直接降低的,對于擴展目標,在近距離上目標散射的日光噪聲為主要影響,甚至會一定程度上導致距離越近,目標探測概率越低,該影響會隨距離的增加而降低,而路徑大氣散射的日光噪聲會隨距離的增加而增加,并逐漸成為主要噪聲源。
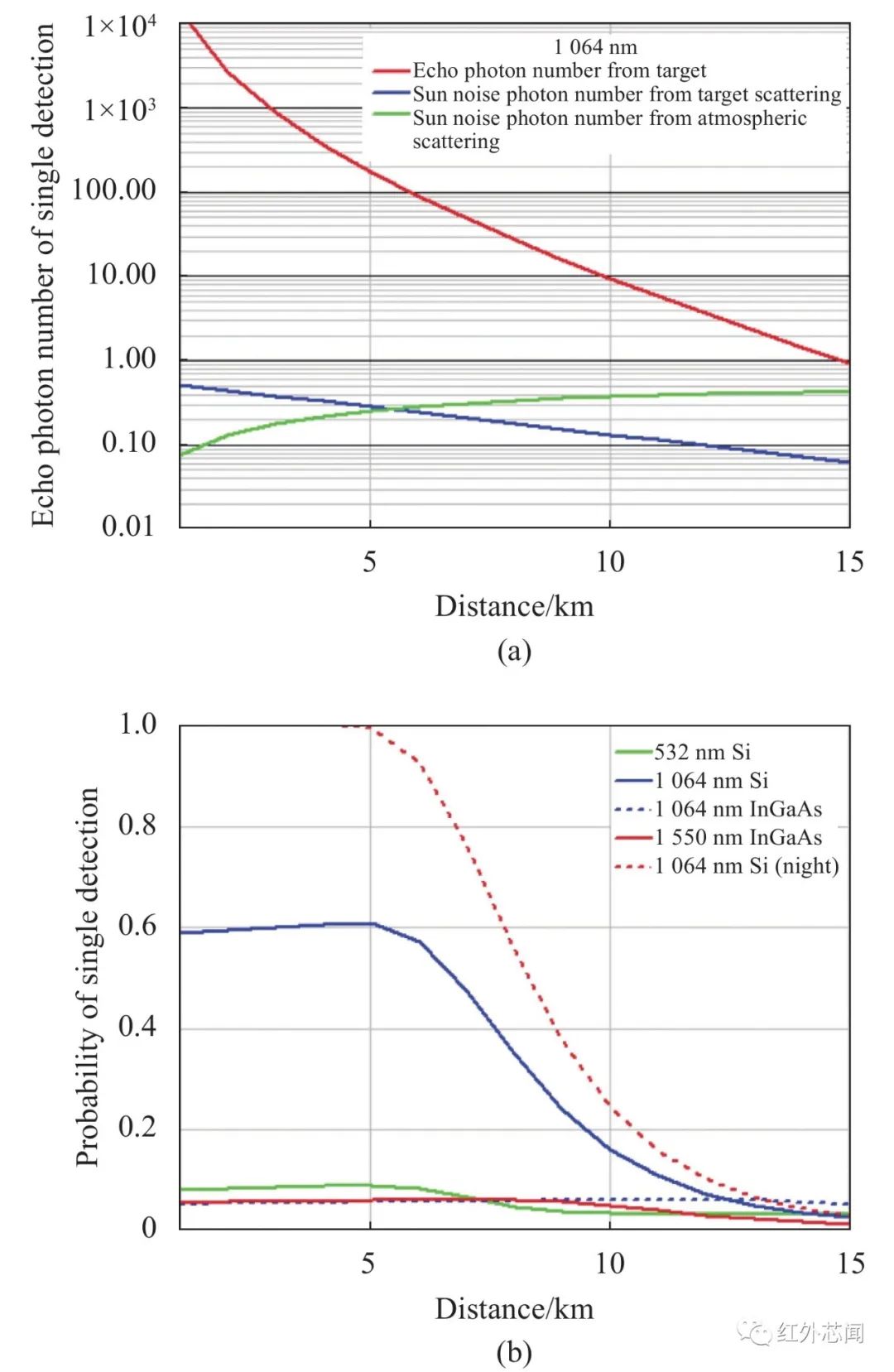
圖3 1 nm濾波帶寬時不同距離單次探測的噪聲信號與探測概率
圖4為夜間無日光背景影響時,不同波長和探測器在對不同距離目標的探測概率。由圖可見,在無日光背景噪聲影響時,探測距離主要受到傳輸路徑大氣衰減的影響,1550 nm波長由于大氣衰減最弱,可以達到最遠的探測距離,1064 nm波長采用InGaAs探測器時量子效率相對Si APD探測器較高,所以探測距離較遠。
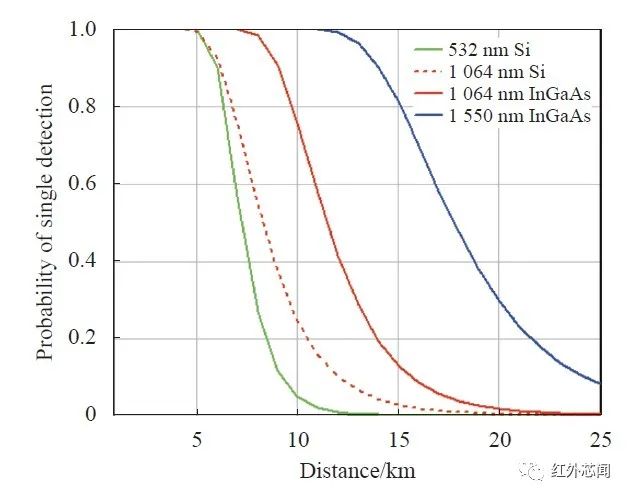
圖4 夜間不同波長和探測器在對不同距離目標的探測概率
基于新型濾波器的單光子激光雷達
背景光噪聲抑制技術是提升激光雷達全天時工作能力的關鍵。目前激光雷達系統中采用的光譜濾波技術主要包括窄帶干涉濾光片、法布里-珀羅(F-P)標準具、光柵濾波器件、原子濾光器等方法。為了達到更好的背景抑制效果,光譜濾波器件的濾波帶寬越窄越好,帶外的抑制能力越高越好,同時為了不影響信號光的接收,其中心波長的透過率越高越好。窄帶干涉濾光片是目前激光雷達中應用最為廣泛的光譜濾波器件,多數窄帶干涉濾光片的濾波帶寬為0.5~10 nm,透過率為70%~90%,帶寬更窄的干涉濾光片制備困難,且透過率會急劇下降;F-P標準具雖然能夠達到幾十皮米量級的濾波帶寬,但是由于其工作原理的限制,導致其對于溫度變化和外界震動異常敏感,需要復雜精密的控制,并且其自由光譜范圍較小,須與干涉濾光片結合使用,這些都限制了F-P標準具的實際應用;光柵濾波器件在衍射效率及濾波帶寬上存在矛盾,且其帶外抑制能力不足。原子濾光器一般只能針對特定波長的入射光產生共振從而透過,同時需要外加溫度控制以及磁場,使用時有諸多不便。
為了實現更好的光譜濾波,筆者采用反射式布拉格光柵作為核心濾波器件,搭建了一個超窄帶光譜濾波系統(UNSFS),該系統濾波帶寬約為50 pm,透過率約為85%,中心波長為1029 nm。同時,采用波長為1029 nm的Yb:YAG窄線寬脈沖激光器作為激光雷達光源。1029 nm與1064 nm同處于1 μm波段,大氣衰減和日光背景輻射水平相當,但對于硅基單光子探測器,在1029 nm處的量子效率約為1064 nm處的三倍(8%)。UNSFS與激光器的光譜匹配關系如圖5所示。
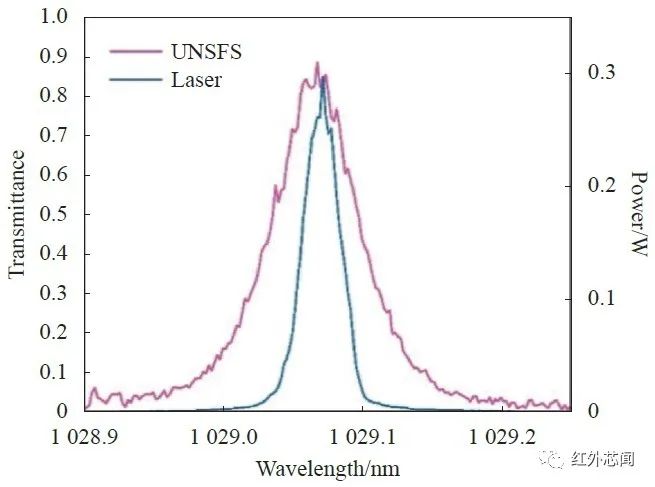
圖5 UNSFS與激光器的光譜匹配關系
圖5中,藍線為濾波器的透過率曲線,FWHM 約為50 pm,中心透過率超過85%,中心波長為1029.07 nm;紅線為激光器的光譜功率,其FWHM約為25 pm,兩者可以有效配合。
基于該UNSFS搭建了一個單光子激光雷達,系統結構如圖6所示。激光重復頻率為1.6 kHz,單脈沖能量為20 μJ,脈沖寬度為2 ns,發射束直徑為1 mm,發散角為1.08 mrad,光學接收徑為25 mm,接收視場為1.3 mrad。透鏡收集的光線通過針孔后進入UNSFS,濾波后透射光線耦合到芯徑為100 μm的多模光纖中,然后進入單光子探測器。激光的發射和接收光束由帶有中心孔的反射鏡進行空間合束,在中心孔旁邊放置PIN探測器作為發射脈沖同步信號源。
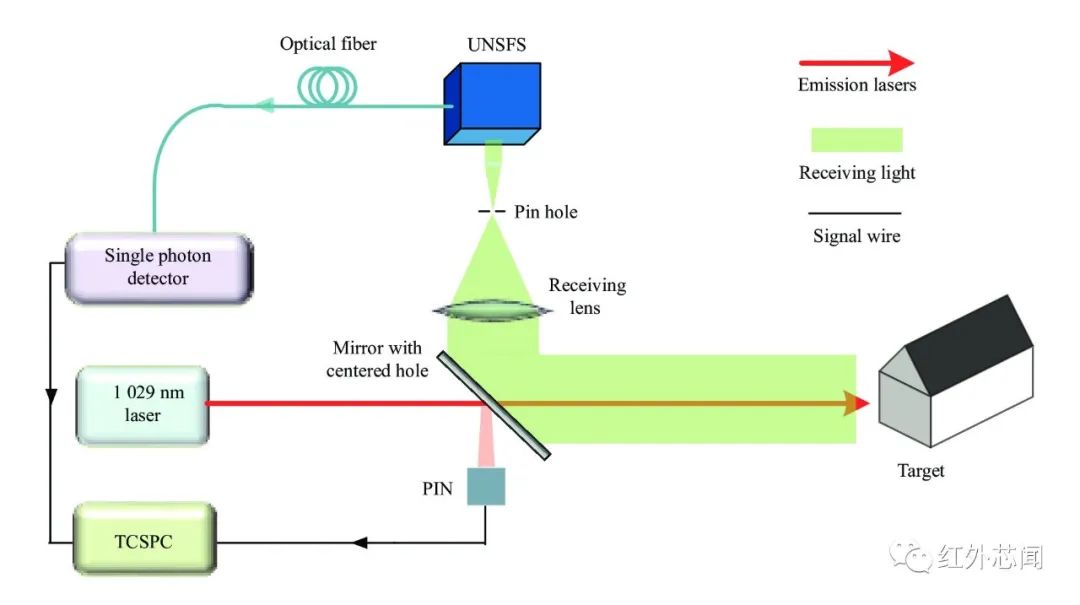
圖6 單光子激光雷達系統結構
完成雷達系統搭建后,首先進行了單點測距實驗,實驗目標選擇為實驗室所能觀測到最遠的目標——成都市東側的龍泉山脈,從地圖上得知該山脈距離實驗地點的直線距離約為25 km。實驗時天氣晴朗,能見度約22 km。從上午10點到晚上10點,每小時進行一次探測,檢測積累時間為1 s (1600次),時間門寬度為16 ns,結果如圖7所示。
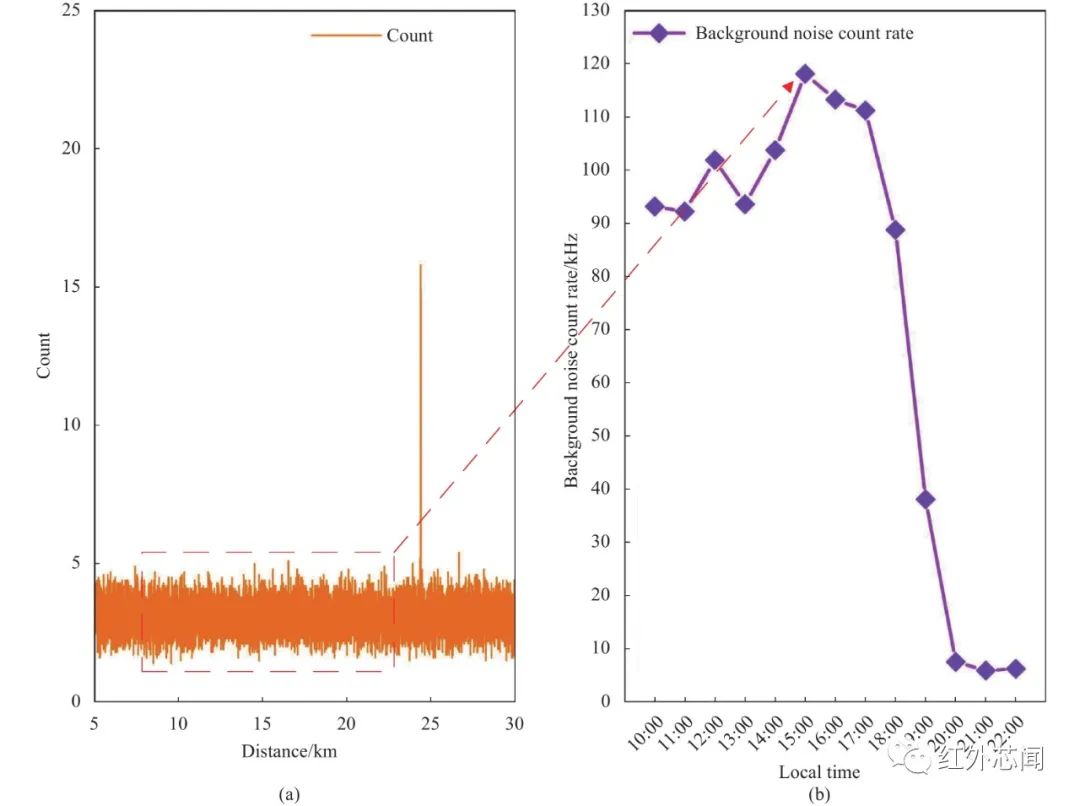
圖7 (a)激光雷達回波光子計數距離直方圖;(b)背景噪聲計數率
圖7(a)為激光雷達回波光子計數距離直方圖,圖7(b)為每次探測的背景噪聲計數率(BNCR)統計。由圖可見,目標實測距離為24.35 km,目標回波信號累積光子計數為16,此時背景光條件下的平均噪聲計數(ANC)為3.06,噪聲計數標準差為0.54。
在強烈背景光條件下,激光雷達系統也擁有非常高的信噪比,該系統在全天最大的背景噪聲計數率僅為119 kHz,遠低于其他的光子計數激光雷達系統(一般為幾MHz量級或者更多)。該實驗能夠證明采用新型UNSFS激光雷達系統擁有良好的日間工作能力。在完成了遠距離測距實驗后,利用一個可二維角度調節的反射鏡完成了對城市區域的快速掃描三維成像實驗,系統實物如圖8所示。
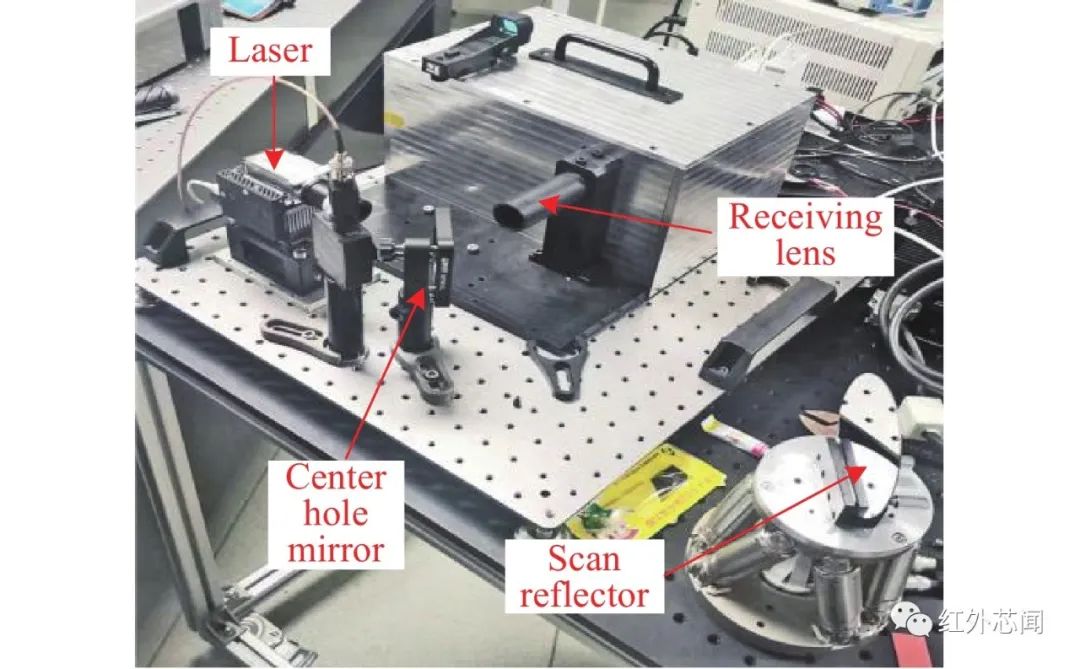
圖8 單光子激光雷達及掃描系統實物圖
掃描的目標選擇了成都市的地標建筑——成都金融城雙子塔,該建筑有著較為明顯的幾何特征。實驗時間選擇在下午4點陽光強烈的時刻,當天能見度約為10 km,整個掃描視場為1°×1°,掃描的圖像分辨率為100×141。得益于該系統優異的背景噪聲抑制能力,使得整個探測掃描的時間大為縮短,這對于遠距離三維成像來說至關重要。整個掃描時間為85 s,單點累加時間約為6 ms。掃描結果如圖9所示。
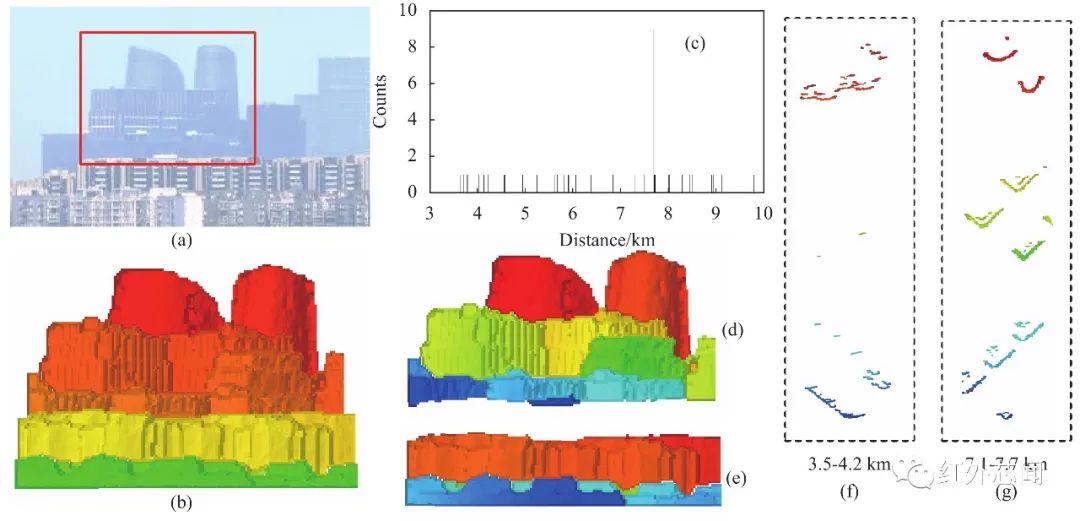
圖9 快速掃描三維成像實驗結果
圖9(a)為在實驗室由光學相機拍攝到的目標照片,紅色線框為激光雷達掃描區域;圖9(b)為掃描全景三維點云圖像;圖9(c)為單個像素在6 ms累加時間下的光子計數直方圖;圖9(d)為7.1~7.7 km遠景三維點云圖;圖9(e)為3.5~4.2 km近景三維點云圖;圖9(f)和圖9(g)分別為近景和遠景區域頂視圖。從結果中可以看出,整個點云圖分布在3.5~7.7 km范圍,能夠非常精細地展示出雙子塔的表面輪廓(細節處有穿透成像),同時前方建筑群的細節也能夠得到有效的展現,證明了該系統能夠出色完成日間強烈背景光條件下的快速三維成像。
激光雷達系統評價模型
在完成了激光雷達的系統搭建和測試實驗后,考慮對其探測性能進行評估。人們一般習慣用最大探測距離來評價,然而對于激光雷達系統來說,簡單地增加接收光學孔徑和發射激光功率總是可以獲得更遠的探測距離,但這不可避免地會帶來對系統資源的更多需求,給雷達的實際應用帶來困難。這里引入經濟學的概念,體積、質量、功耗等系統資源對于一臺激光雷達來說可以認為是各種“投資”,而“回報”就是最大探測距離。在經濟學上,人們追求更高的投資回報率(ROI),對于激光雷達系統同樣也應如此。為此,文中提出了一種激光雷達性能評估模型,該模型將激光雷達系統的“投資”參數進行歸一化,以此來評價一個激光雷達系統是否更經濟,即投入更少的系統資源能否獲取更遠的探測距離。
對于一個激光雷達系統而言,其光學接收面積和激光發射功率無疑都屬于“投資”,而且探測時間也是應考慮的一種時間“投資”。對于激光雷達探測的“回報”,通常習慣以最大探測距離作為評價,并且考慮到距離項在激光雷達方程中是以平方形式給出的,因此,將最大探測距離的平方作為激光雷達系統的“回報”。除了上述參數外,激光雷達的最大探測距離還與傳輸路徑的衰減和目標的有效散射截面有關,但它們都屬于外部影響因素,而這里只對激光雷達系統本身進行評估,在此評估模型中不對它們進行考慮。
由此,可以通過在單位接收面積、單位發射功率和單位探測時間情況下系統的最大探測距離平方來得到激光雷達的ROI指數。ROI指數越高,激光雷達的探測效率就越高,或者說激光雷達探測更為“經濟”。
需要指出的是,對于N×M面陣探測激光雷達,其單像素探測時間為T/(N×M),而T是其單幀的探測時間。可見,對于面陣探測激光雷達,通過一次探測即可同時獲得N×M個像素點的距離值,從而縮短了探測時間。然而,為了保證N×M個像素的同時探測,它必將以更高的發射總功率或更大的接收面積為代價。同樣,對于單點激光雷達,它減少了對發射功率或接收面積的需求,但同時付出的是需要掃描N×M個點才能完成三維成像的時間代價。
另外,線性探測激光雷達可以用一個脈沖即完成測量,而光子計數激光雷達要積累一定數量的脈沖才能識別目標獲得測量值,這也可以看作是對探測時間上不同的“投資”。
為了展示ROI指數的評估效果,這里除了上文提出的新型單光子激光雷達外,還選擇了四個具有代表性的光子計數激光雷達系統作為參考進行評估。表3中,系統1是英國赫瑞·瓦特大學的遠距離單光子掃描成像系統,能夠在800 m~10.5 km (夜間工作)的范圍內獲取3D圖像。系統2是NASA ATLAS系統,部署在ICESat-2衛星上,軌道高度500 km,用于對地觀測,它可以晝夜工作。系統3是中國科學技術大學的單光子3D成像激光雷達系統,該系統在夜間獲得了202 km距離的掃描3D成像,并在21.6 km處進行了白天3D成像實驗(系統4)。系統5是上文提出的新型單光子激光雷達系統。
需要指出的是,對于上文提出的新型單光子激光雷達系統,在以上評估中使用的探測距離值僅僅是一個實際探測實驗中的距離值,而遠遠不是該激光雷達的最大可探測距離。此外,表3中使用的數據都來自公開發表的文獻,并不代表這些激光雷達系統的實際最大可探測距離。因此,表3中計算的ROI指數僅供參考,并不表示這些系統所能達到的實際指數。
表3 不同激光雷達系統ROI指數對比

另外,對于三維成像激光雷達,利用基于目標空間關聯性的各種算法可以有效減少單像素的累積時間,從而提高系統的ROI指數。對于圖9中的3D成像,由于每個單像素的探測信噪比已經足夠好,沒有應用任何其他關聯算法。
結論
文中從單光子激光雷達的探測原理出發,分析了全天時工作對單光子激光雷達探測系統的需求,尤其是白天探測時所面臨的背景噪聲水平,對比了幾種采用主流探測波長和探測器時激光雷達的探測性能。條件允許時,超導納米線單光子探測器會有較大優勢,除此之外,綜合考慮目前的器件水平以及日光輻射、大氣散射等影響,采用1 μm波段作為探測波長和硅基的單光子探測器,會帶來更好的全天時探測性能。
在此基礎上,文中采用反射式布拉格光柵作為核心濾波器件,研制了一個超窄帶激光雷達光譜濾波系統(50 pm帶寬),配合使用窄線寬1029 nm脈沖激光器(25 pm線寬)作為光源,搭建了一套新型的全天時單光子激光雷達系統。利用該激光雷達在城市復雜大氣環境中完成了24.35 km的測距與全天時噪聲水平的測試實驗。隨后完成了3.2~7.7 km的高動態快速三維掃描成像實驗。實驗結果表明,該系統能夠在強烈背景光條件下出色地完成探測任務,能夠極大地提升單光子激光雷達的全天時探測能力,為白天工作的激光雷達提供了一種全新的實用解決方案。
此外,為了對實際激光雷達系統的性能進行評價,類比經濟學中的“投資回報率”概念,提出了一種激光雷達評價模型,即ROI指數,該指數能夠十分直觀地對各種激光雷達系統探測性能進行評價,可作為一種通用的激光雷達性能評價標準。所提出的新型單光子激光雷達的ROI指數為6.03×101?,是一個相當高的分數。
審核編輯:劉清
-
濾波器
+關注
關注
160文章
7749瀏覽量
177730 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189625 -
單光子探測器
+關注
關注
1文章
31瀏覽量
4423
原文標題:全天時單光子激光雷達技術進展與系統評價
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
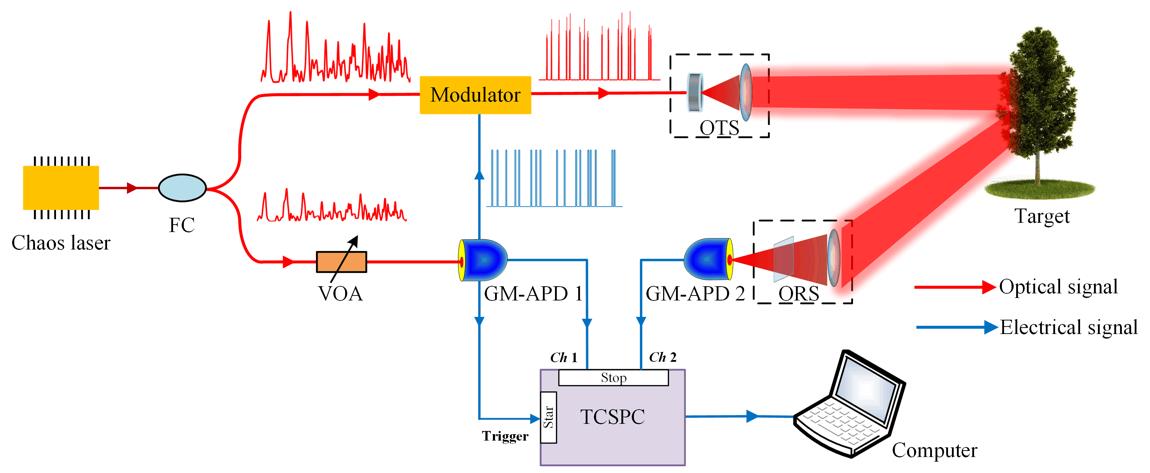
使用單光子探測技術設計的數字混沌激光雷達系統

單光子激光雷達:航空遙感技術的革命性突破

激光雷達的維護與故障排查技巧
激光雷達技術的發展趨勢
中科院微電子所在光子集成激光探感技術方面取得進展
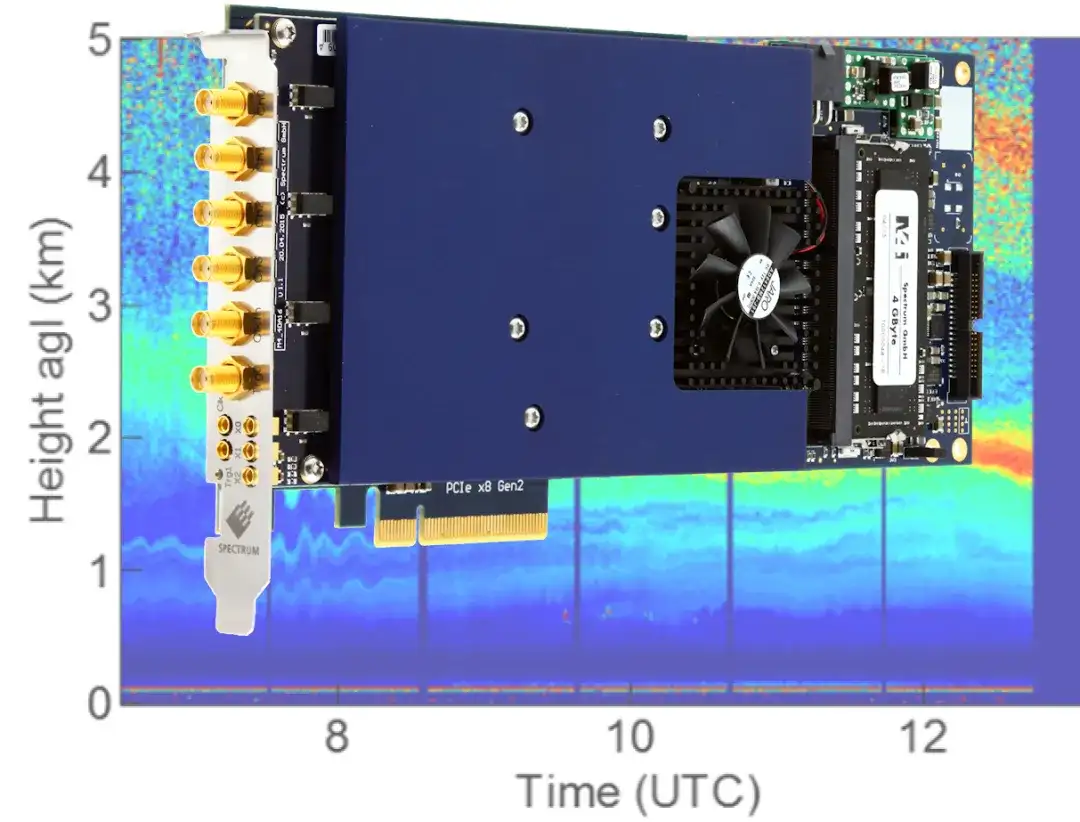
TS高速數字化儀在激光雷達系統中的應用
基于SPAD單光子相機的LiDAR技術革新

機載單光子激光雷達系統用于實現高分辨率3D成像

基于光子-電子集成回路的相干激光雷達引擎設計
硅基片上激光雷達技術綜述

激光雷達的探測技術介紹 機載激光雷達發展歷程






 工商網監
工商網監
評論