") 通過PLC和遙控器實現(xiàn)搬運平車的運動控制
通過PLC和遙控器實現(xiàn)搬運平車的運動控制
在網上看到搬運平車的介紹,搬運平車的運動控制是通過PLC和遙控器結合來控制實現(xiàn)的,自己就想著嘗試自己寫下程序來實現(xiàn)控制,自己寫的程序通過觸摸屏來進行模擬。
觸摸屏軟件使用是McgsPro組態(tài)軟件來做簡單的按鈕設計,模擬程序和PLC通信進行程序的仿真進行。
1、打開McgsPro組態(tài)軟件進行新建工程,在新建工程中設置參數(shù)。
打開軟件
2、進行設備組態(tài),實現(xiàn)McgsPro組態(tài)軟件和PLC進行通信,在通信中遠程控制IP是PLC的IP地址。
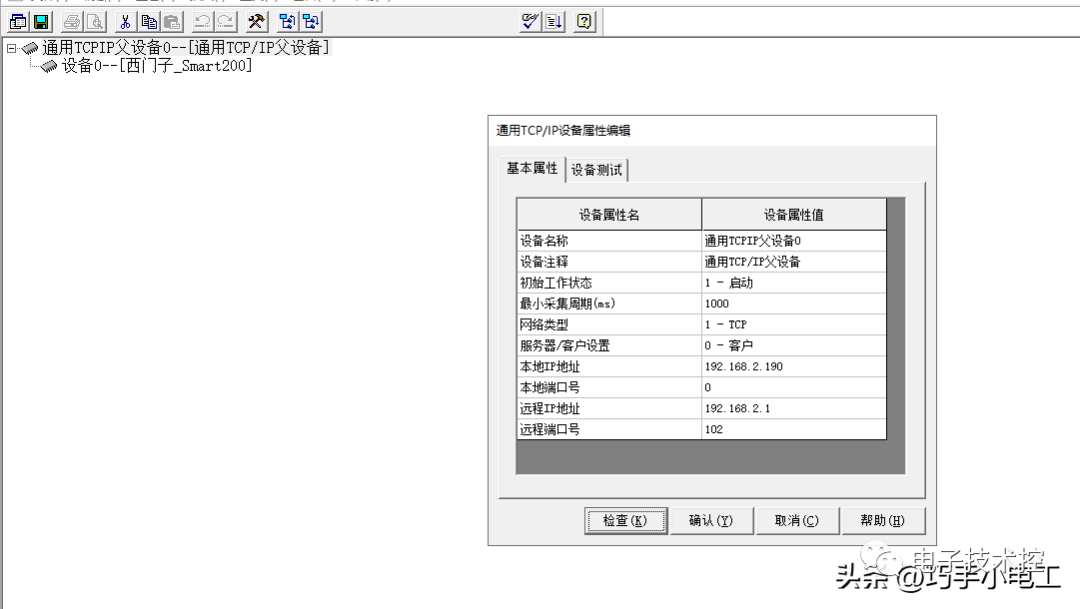
觸摸屏和PLC通信
3、對參數(shù)進行設置,因為在PLC編程的時候需要用到M和Q。
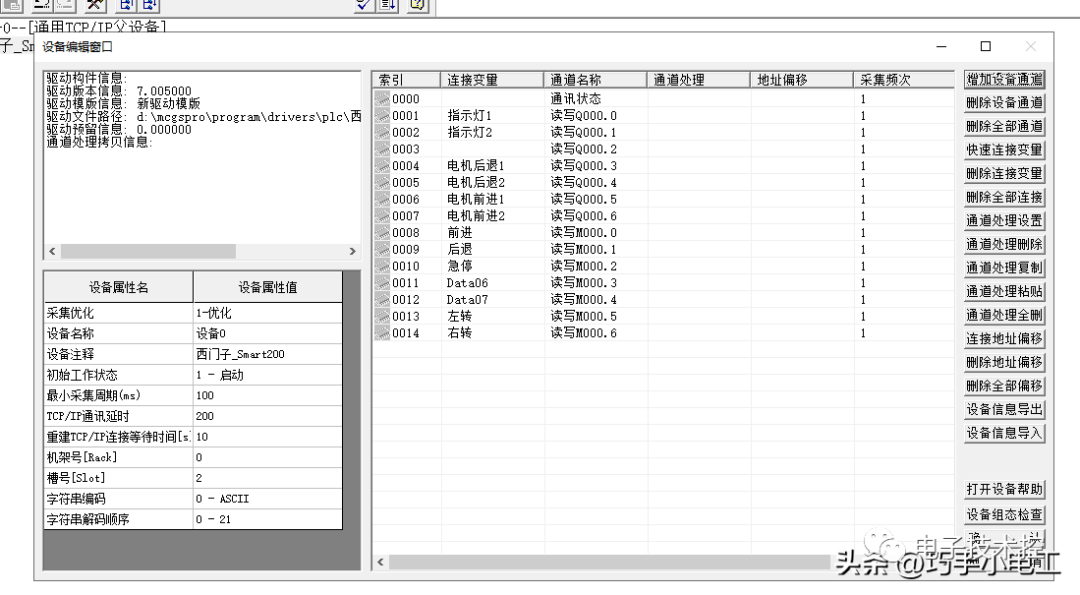
參數(shù)設置
4、對按鍵進行編制
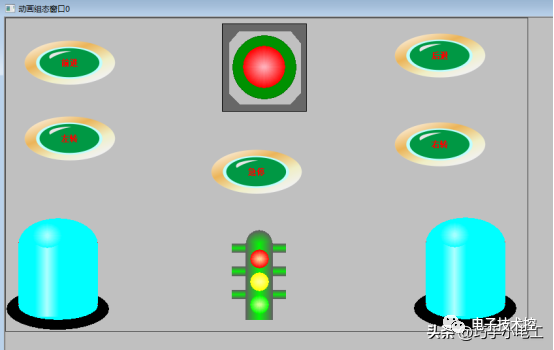
觸摸屏
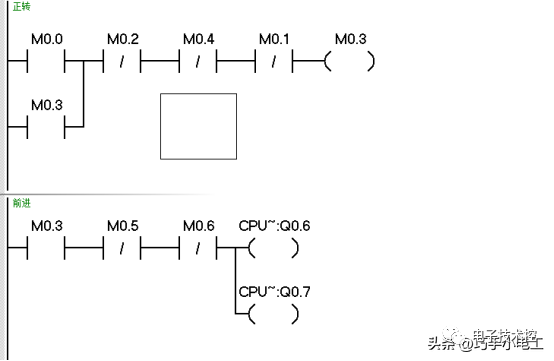
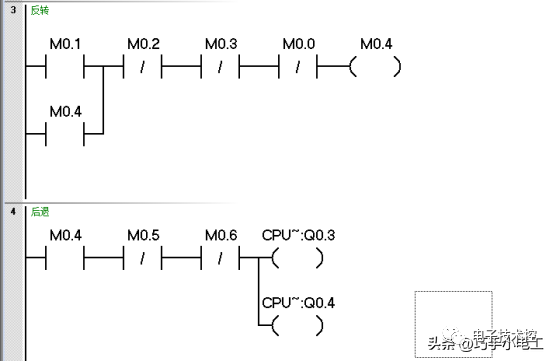
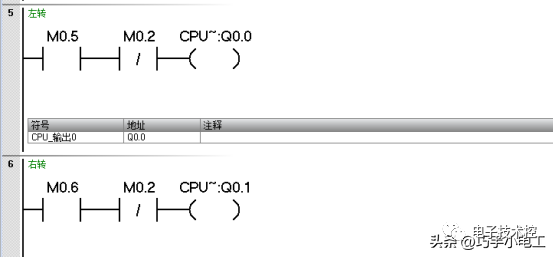
PLC編程軟件使用的是STEP 7-MicroWIN SMART
程序段
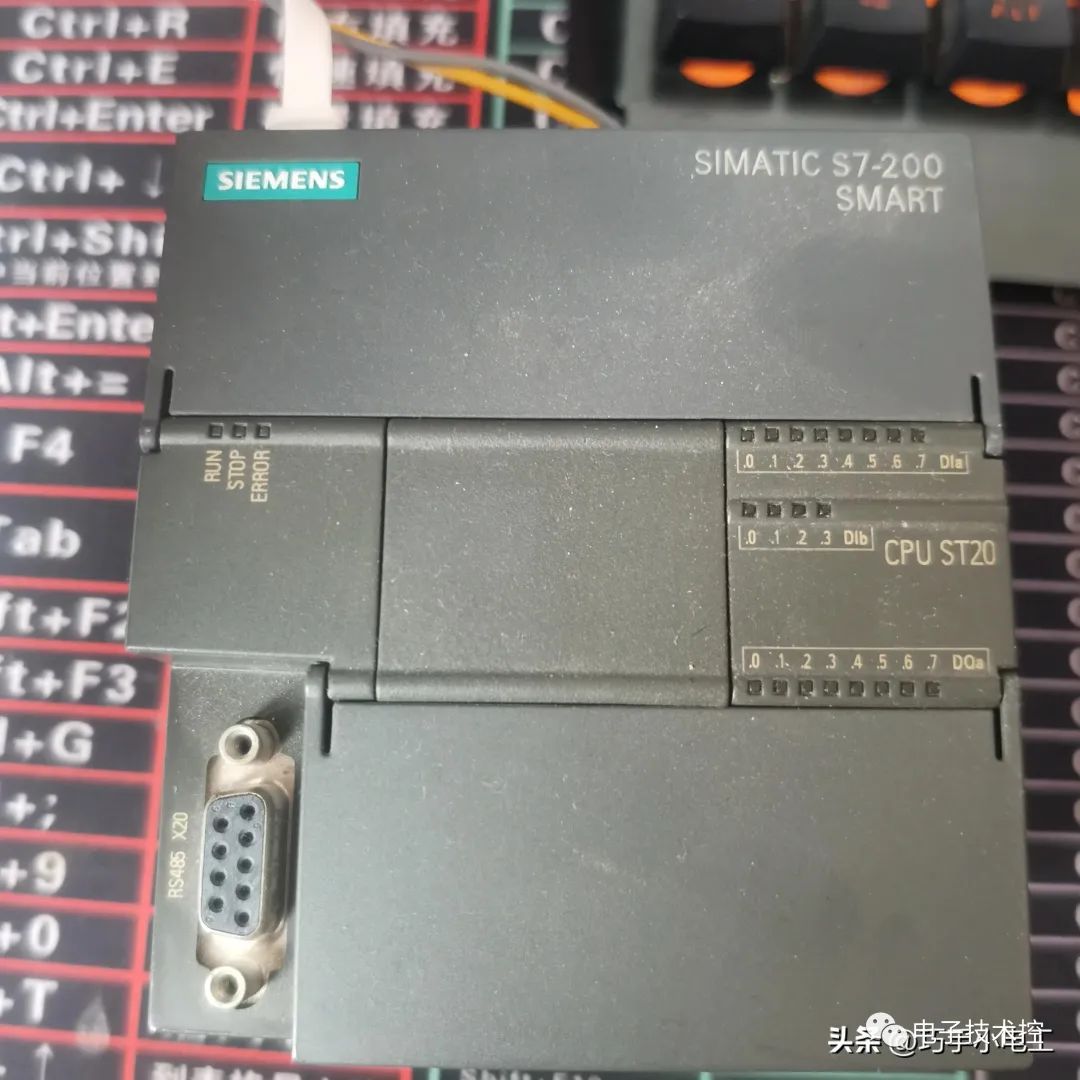
PLC使用的是SIMATIC S7-200 SMART CPU ST20
總結:
1、目前程序能夠實現(xiàn)前進、后退、左轉、右轉、急停通過觸摸屏的控制,但是指示燈部分還不能進行顯示。
2、嘗試用子程來寫調用程序,但是部分功能實現(xiàn)(后退實現(xiàn)),但是前進不能調動子程出現(xiàn)問題。
3、程序部分還需要進行優(yōu)化處理。 通過這次編程讓自己找到自己學習中的很多不足,在學習中一看視頻全部會,但是一動手做項目馬上就報廢。要想學好PLC編程,自己多動手做項目是能夠快速提升自己。
延伸閱讀:如何利用PLC來實現(xiàn)簡單的搬運動作
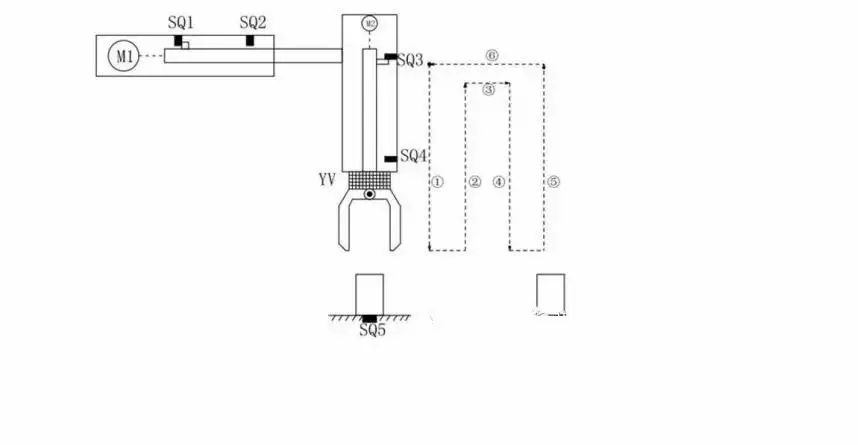
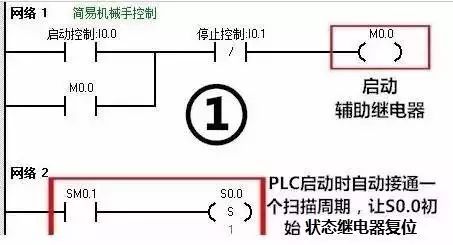
簡易機械手結構圖如圖所示
M1為控制機械手左右移動的電動機
M2為控制機械手上下升降的電動機
YV線圈用來控制機械手夾緊防松
SQ1為左到位檢測開關
SQ2為右到位檢測開關
SQ3為上到位檢測開關
SQ4為下到位檢測開關
SQ5為工件檢測開關
簡易機械手的控制要求如下:
機械手要將工件從工位A移到工位B 處;
機械手的初始狀態(tài)(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
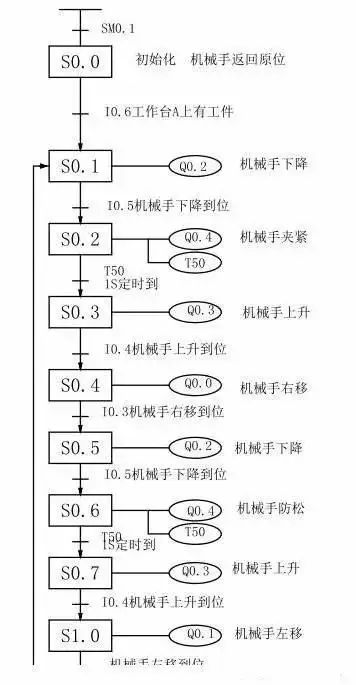
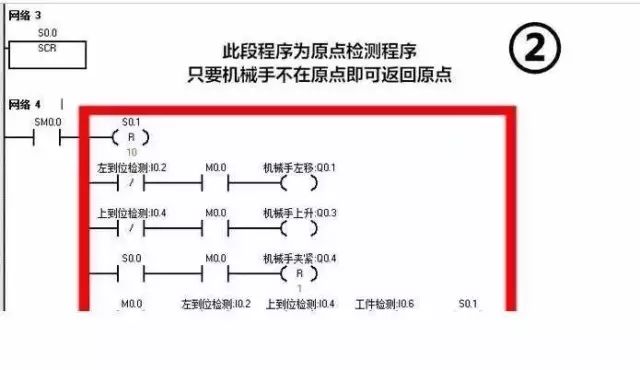
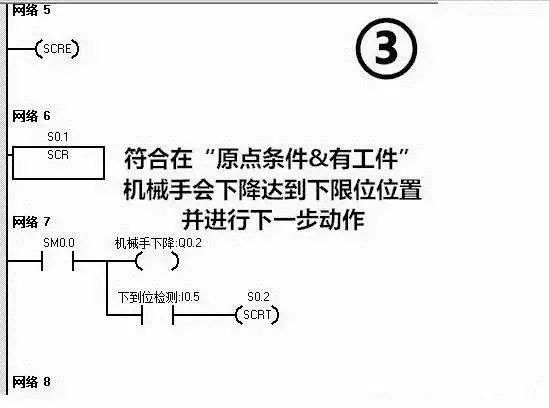
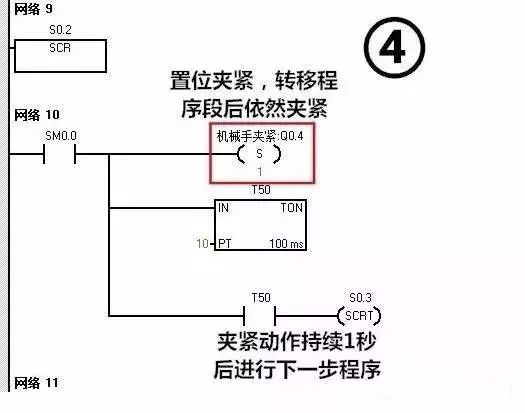
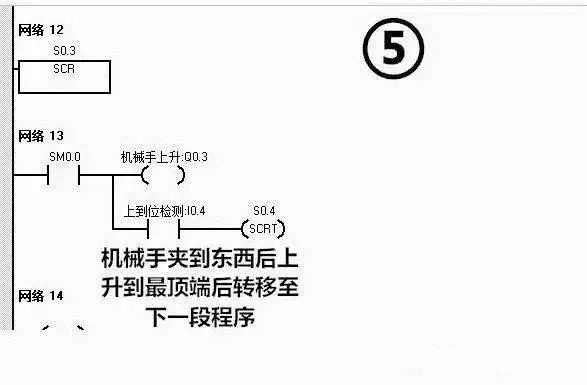
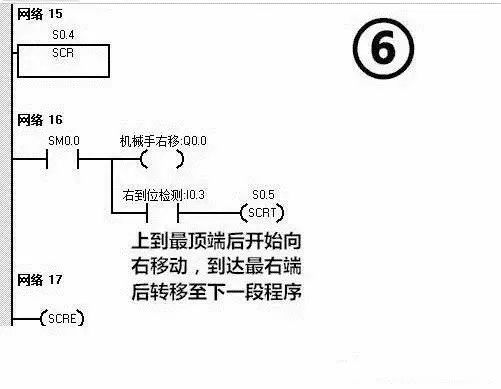
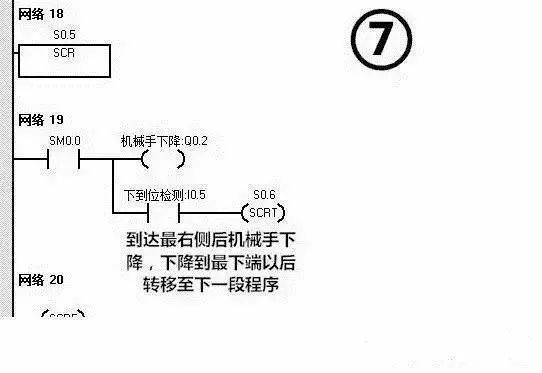
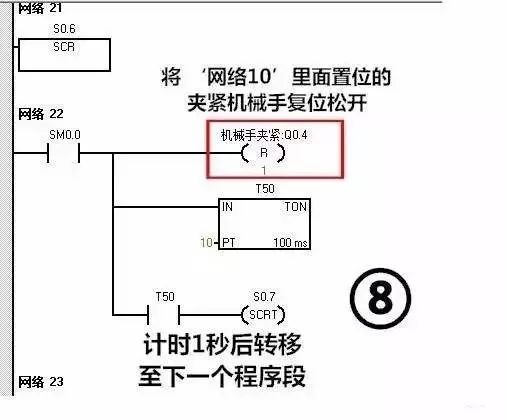
若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機械手按“原點→下降→夾緊→上升→右移→下降→放松→上升→左移→原點”的步驟工作。
動作圖編程前理順動作如何轉移:
定義符號表:

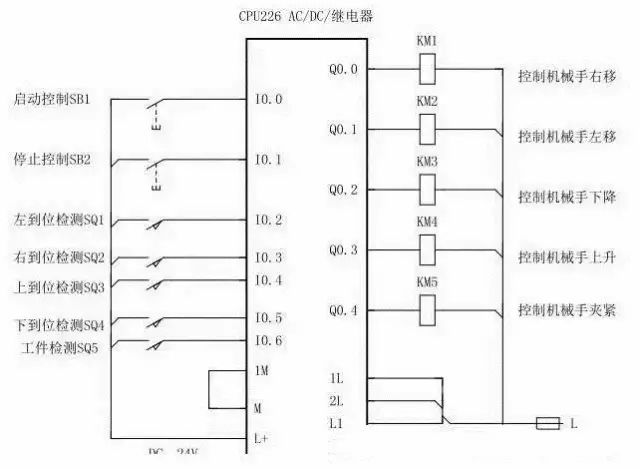
硬件的接線圖:
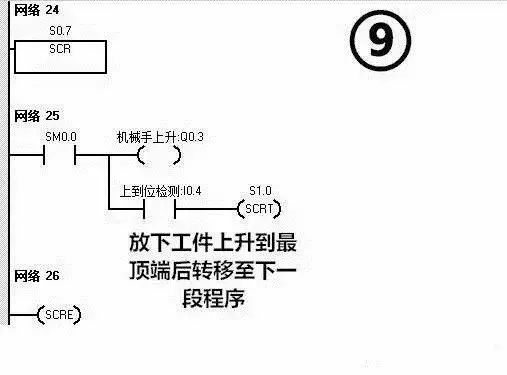
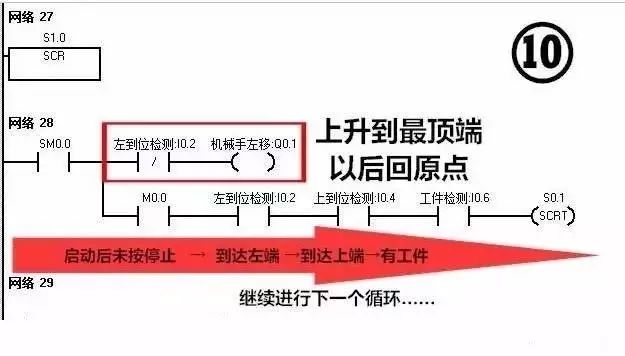
滿足所有動作的程序如下:

一大堆梯形圖看著真是眼花繚亂,不用擔心我們一段一段分析分析這個機械手是如何工作的!
其實這個圖沒有那么多的并行分支,所以轉移起來邏輯非常簡單!
審核編輯:湯梓紅
-
plc
+關注
關注
5008文章
13150瀏覽量
462050 -
cpu
+關注
關注
68文章
10824瀏覽量
211137 -
觸摸屏
+關注
關注
42文章
2290瀏覽量
115991 -
S7-200
+關注
關注
13文章
407瀏覽量
50323 -
SIMATIC
+關注
關注
1文章
231瀏覽量
15714
原文標題:PLC使用的是SIMATIC S7-200 SMART CPU ST20
文章出處:【微信號:電子技術控,微信公眾號:電子技術控】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
如何利用PLC來實現(xiàn)簡單的搬運動作?
基于ST的MEMS傳感器的個人電腦和媒體遙控器空中運動控制
設備應用于智能遙控器中的設計與實現(xiàn)
單片機實現(xiàn)網絡遙控器的方法(遙控器+顯示屏+語音控制)
PDA上實現(xiàn)遙控器的集成
如何通過亞馬遜Alexa語音控制遙控器
基于STM32的紅外遙控器設計,實現(xiàn)紅外遙控器的復制與紅外信號的發(fā)送

如何利用PLC實現(xiàn)簡單的搬運動作

找方案 | 基于Infineon SoC藍牙CYW20835之智能遙控器方案

PLC實例:順序控制指令,實現(xiàn)搬運動作






 工商網監(jiān)
工商網監(jiān)
評論