 使用IC4070和IC4013構建的步進電機控制器電路
使用IC4070和IC4013構建的步進電機控制器電路
步進電機是一種無刷直流電機,它將單個旋轉分成相等的步數。這些類型的電機廣泛用于機器人和其他精確運動起著至關重要作用的應用。本電路教程演示了使用 IC4070 和 IC 4013 構建和工作步進電機控制器。
步進電機控制器電路的工作原理:
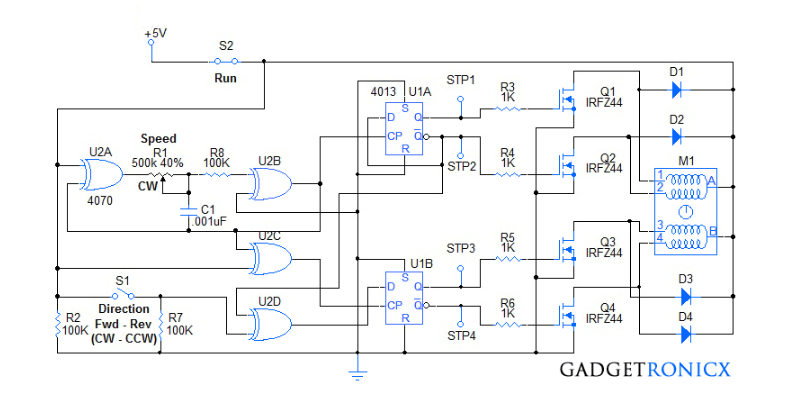
參考原理圖,兩個IC的U1A,B和U2A,B,C,D組成振蕩器,以及驅動步進電機M1所需的正反正交信號。具體來說,作為逆變器接線的異或門U2A和作為緩沖器接線的U2B與R1、C1和R8形成振蕩器電路。電阻R8用于保護U2B的輸入免受過壓和過電流的影響。C1和R1決定振蕩器的頻率。隨著R1的減小(轉CW),頻率增加,步進速率也隨之增加。如果需要較慢的步進速率,則可以根據需要增加C1的值。
U2B 連接到雙觸發器、U1A 時鐘輸入和U2C。U2C作為逆變器接線,為U1B提供反轉時鐘。U1A的Qnot輸出連接到U1A的數據輸入。因此,當U1A看到時鐘的每個上升沿時,U1A的Q和Qnot的輸出狀態被切換(反轉)。
開關S1,連接到R7和異或門U2D的輸入。當按下S1時,U2D作為逆變器工作。當 S1 打開時,U2D 用作緩沖區。U1A 的 Qnot 輸出連接到U2D的另一個輸入。U2D的輸出連接到U1B的數據輸入。由于U1B的時鐘輸入是對U1A時鐘輸入的補充,因此U1B的輸出將在U2A,B,C時鐘的相反邊緣更新。由于U2D反轉或只是緩沖U1A的Qnot輸出。U1B的輸出將領先或滯后 U1A 的輸出 90 度,從而產生所需的正交輸出。
電路的其余部分很簡單。R3-6為驅動晶體管提供電流,Q1-4。它們顯示為 IRFZ44、n 溝道MOSFET,但只要對所使用的步進電機具有足夠的增益和電流額定值,則可以使用任何 n 溝道 MOSFET 或 BJT (NPN)晶體管。D1-4為驅動器提供反激保護,以釋放步進電機線圈中的磁場能量。
注意:
開關 S2 是為電路供電的停止-運行開關。
按 S1 可反轉步進電機的方向。
如果需要更高的電壓(高于12V),可以插入7812穩壓器為電路的U1A,B和U2A,B,C,D部分供電。
-
步進電機
+關注
關注
150文章
3095瀏覽量
147352 -
步進電機控制器
+關注
關注
1文章
19瀏覽量
6404
發布評論請先 登錄
相關推薦
用于厚膜混合IC單極恒流斬波電路的步進電機控制評估板
基于TOSHIBA/東芝 TB67S128FTG 步進電機控制器IC,資料參數



探索步進電機驅動IC的創新融合






 工商網監
工商網監
評論