") 基于單片機的直流伺服電機控制系統(tǒng)設(shè)計
基于單片機的直流伺服電機控制系統(tǒng)設(shè)計
設(shè)計一個直流伺服電機控制系統(tǒng),控制功能要求實現(xiàn)電機的啟動、停止控制、正轉(zhuǎn)、反轉(zhuǎn)、加速、減速共六種功能,為了能實現(xiàn)人機交互,需要用到按鍵和數(shù)碼管。
具體要求如下:K0為啟動/停止控制、K1正轉(zhuǎn)、K2反轉(zhuǎn);K3加速,K4減速,用3個發(fā)光二極管顯示狀態(tài):正轉(zhuǎn)時紅燈亮,反轉(zhuǎn)時黃燈亮,不轉(zhuǎn)時綠燈亮。并利用4位LED數(shù)碼管顯示電機轉(zhuǎn)速。
要求分析:
按鍵K1用來控制電機反轉(zhuǎn),若電機正在停止或正轉(zhuǎn)狀態(tài),當(dāng)按下k1時,電機開始反轉(zhuǎn);若電機處于反轉(zhuǎn)狀態(tài),電機不響應(yīng)按鍵命令。
按鍵K2用來控制電機正轉(zhuǎn),若電機正在停止或反轉(zhuǎn)狀態(tài),當(dāng)按下k2時,電機開始正轉(zhuǎn);若電機處于正轉(zhuǎn)狀態(tài),電機不響應(yīng)按鍵命令。
按鍵K3用來控制電機加速,當(dāng)電機處于運行狀態(tài)時,如果電機尚未達到最大轉(zhuǎn)速,當(dāng)按下按鍵K3時,電機會加速,每按一次,電機加速一個節(jié)拍,若需要一直加速,則需要多次按下按鍵K3,當(dāng)電機到達最大速度時,電機將保持在最大速度運行,不再響應(yīng)按鍵命令。
按鍵K4用來控制電機減速,當(dāng)電機處于運行狀態(tài)時,如果電機尚未達到最小轉(zhuǎn)速,即停止?fàn)顟B(tài),當(dāng)按下按鍵K4時,電機會減速,每按一次,電機減速一個節(jié)拍,若需要一直減速,則需要多次按下按鍵K4,當(dāng)電機到達最小速度時,即電機處于停止?fàn)顟B(tài),電機將保持停止,不再響應(yīng)按鍵命令。
為了知道電機是否按控制要求工作,需要知道電機的轉(zhuǎn)速,這里用到了4位數(shù)碼管來顯示,最高位顯示轉(zhuǎn)動方向,正轉(zhuǎn)顯示“0”,反轉(zhuǎn)顯示“-”。后3位用來顯示轉(zhuǎn)速的數(shù)值大小。
此外,設(shè)置三個發(fā)光二極管,來顯示電機的運行狀態(tài)。當(dāng)電機停止時,綠燈亮,當(dāng)電機正轉(zhuǎn)時,紅燈亮,當(dāng)電機反轉(zhuǎn)時,黃燈亮。
2.控制方案設(shè)計
因為直流電機的工作電壓和電流與控制電路的電壓和電流不匹配,所以需要設(shè)計接口電路,用來把控制電路的指令轉(zhuǎn)化為電機的工作信號,這種接口電路稱為直流電機的驅(qū)動電路。直流電機的驅(qū)動電路有多種不同的設(shè)計方案,這里著重介紹了用分立元件構(gòu)成的驅(qū)動電路和用集成芯片構(gòu)成的驅(qū)動電路。
2.1用分立元件構(gòu)成直流電機的驅(qū)動電路
利用晶體管,電阻等分立元件,來組成直流電機的全橋驅(qū)動電路。因為電機的工作電流較大,而一個三極管的電流放大能力有限,所以采用達林頓組成全橋(H橋)驅(qū)動電路控制電機,以滿足電機工作的需要。如圖1所示。圖中的Q1~Q4是功率三極管,其中Q1和Q2組成一個橋臂,其中Q3和Q4組成一個橋臂。每個功率三極管旁邊有一個續(xù)流二極管。當(dāng)Q1和Q4打開時,直流電機的控制電流從A流向B,此時直流電機正轉(zhuǎn);當(dāng)Q2和Q3打開時,直流電機的控制電流從B流向A,此時直流電機反轉(zhuǎn)。這樣,通過Q1~Q4的控制就可以控制直流電機的轉(zhuǎn)向了。
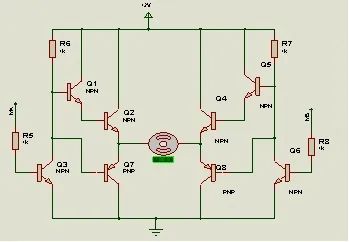
圖1直流電機全橋控制原理圖
2.2用電機驅(qū)動芯片來構(gòu)成直流電機的驅(qū)動電路
這里所用的驅(qū)動芯片是L298,L298起到方大電流的作用。L298有4路輸入,4路輸出,2個使能端。用L298構(gòu)成的驅(qū)動電路如圖2所示。
其工作原理為:L298芯片中,IN1對應(yīng)OU1,IN2對應(yīng)OUT2,IN3對應(yīng)OU3,IN4對應(yīng)OUT4,使能端ENA對應(yīng)IN1和IN2,使能端ENB對應(yīng)IN3和IN4。在使能端為高電平的狀態(tài)下,當(dāng)IN1輸入高電平IN2輸入低電平時,電機正轉(zhuǎn),當(dāng)IN1輸入低電平IN2輸入高電平時,電機反轉(zhuǎn),當(dāng)IN1和IN2輸入電平相等時,電機不轉(zhuǎn)。如果使能端為低電平,那么電機不受控制,而處于停止?fàn)顟B(tài)。
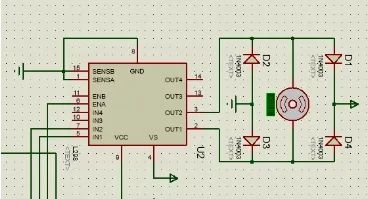
圖2直流電機驅(qū)動電路圖
L298的工作電壓范圍在7V~50V之間,輸出電流可達2A,能夠滿足直流電機的控制需要。
2.3.方案選擇
以上所給的兩種直流電機的驅(qū)動方案都能滿足要求,現(xiàn)在來對它們進行分析比較,選出合適的方案。
用分立元件構(gòu)成的直流電機驅(qū)動電路,其優(yōu)點是:電路由分立元件組成,通過分析電路,能直觀的了解驅(qū)動電路的工作原理,對于理論學(xué)習(xí)是非常有幫助的。其缺點是:電路過于復(fù)雜,在制作實物時容易出錯,另一方面,分立元件過多,其可靠性很難保證。
用集成芯片構(gòu)成的直流電機驅(qū)動電路,其優(yōu)點是,電路簡單,元件減少,電路的可靠性高,制作實物時相對較容易。其缺點是,對于初學(xué)者很難知道期內(nèi)的工作原理,只能簡單的用。
通過上面的分析,我決定選用集成芯片L298來構(gòu)成直流電機的驅(qū)動電路,這樣實現(xiàn)起來較為容易。
2.4.總體方案設(shè)計
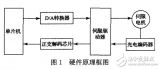
控制系統(tǒng)的核心控制芯片是AT89C51單片機,單片機作為整個系統(tǒng)的大腦,協(xié)調(diào)各個部件的工作。首先,當(dāng)按鍵發(fā)出的控制指令時,單片機利用外部中斷采集控制指令,并對控制指令進行處理,之后輸出信號控制直流電機的驅(qū)動電路。與此同時,單片機要計算直流電機的轉(zhuǎn)速,并且要把電機的轉(zhuǎn)速在數(shù)碼管上顯示出來。直流電機的調(diào)速是通過單片機控制輸出PWM的占空比實現(xiàn)的,為了提高單片機的工作效率,對按鍵的掃描采用中斷方式。其原理框圖如圖3:
圖3控制系統(tǒng)原理框圖
3.1單片機最小工作系統(tǒng)
單片機最小工作系統(tǒng)指單片機能正常工作的最少配置,包括電源、時鐘電路、復(fù)位電路和一塊51單片機。
(1)89C51
AT89C51是一種帶4K字節(jié)FLASH字節(jié)存儲器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低電壓、高性能CMOS 8位微處理器,俗稱單片機。如圖4所示。
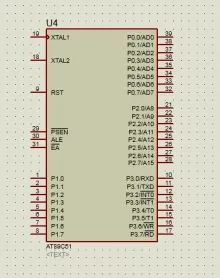
圖4AT89C51
(2)時鐘電路
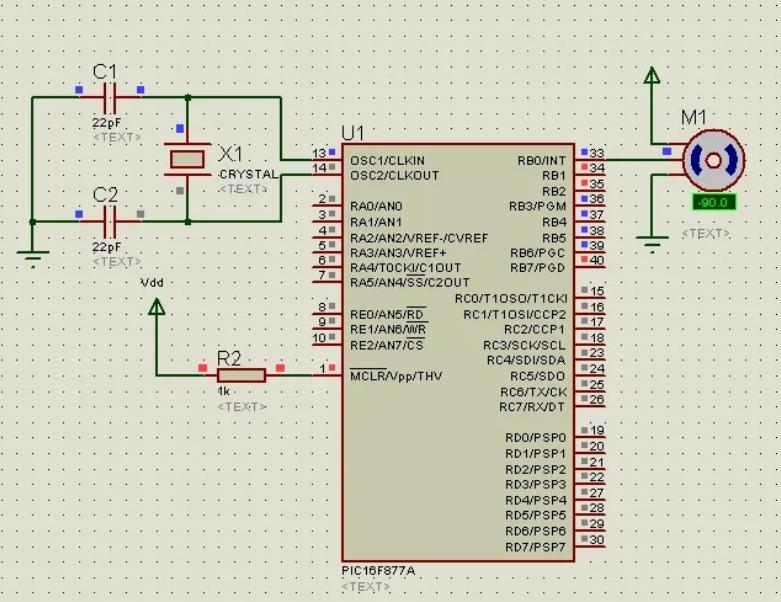
MCS-51單片機的時鐘有兩種工作方式:一種是內(nèi)部振蕩方式,它是利用單片機內(nèi)部的振蕩電路,產(chǎn)生時鐘信號,這種方式單片機的時鐘引腳上接石英晶體和振蕩電容;另外一種是外部振蕩方式,它是把外部已有的時鐘引入單片機。下面來介紹較為常用的內(nèi)部振蕩方式:
如圖5,單片機內(nèi)部有一個用于構(gòu)成振蕩器的高增益反相放大器,它的輸入端為XTAL1引腳,輸出端為XTAL2引腳,分別是8051單片機的19腳和18腳,其頻率范圍為fOSC=0~12MHZ。
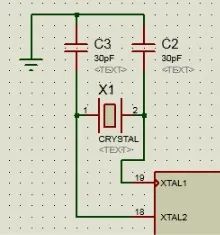
圖5內(nèi)部振蕩方式時鐘電路圖
(3)復(fù)位電路
往單片機的復(fù)位引腳上輸入24個時鐘周期以上的高電平,即執(zhí)行復(fù)位操作。在此次課設(shè)中我用的是按鍵復(fù)位,電路如圖6所示,系統(tǒng)在運行時,按下復(fù)位按鍵,就能在RST引腳產(chǎn)生一段時間的高電平,使系統(tǒng)復(fù)位。此處,取12MHZ的晶振,電容取30pF。
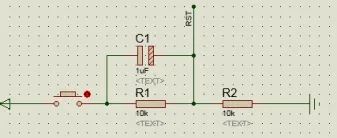
圖6按鍵復(fù)位電路
3.2數(shù)碼管顯示電路
LED數(shù)碼管是由a、b、c、d、e、f、g、h這8段發(fā)光二極管組成的“8”字形顯示器件。LED數(shù)碼管分為共陽極和共陰極兩種,如圖7所示,如果每段的陽極接在一起則為共陽極LED,如果每段的陰極接在一起則為共陰極LED。此次課設(shè)中,我所用的數(shù)碼管為共陰極的。
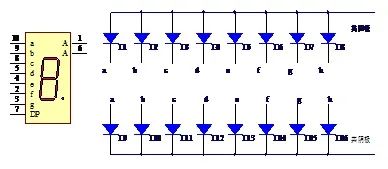
圖7LED數(shù)碼管
這里用到了4位數(shù)碼管,如圖8所示,段選端接單片機的P0口,因為P0口內(nèi)部沒有上拉電阻,為高阻態(tài),不能正常的輸出高/低電平,所以這里需要上拉電阻。為了電路的簡化,這里使用了排阻。數(shù)碼管的位選端接單片機的P1.0~P1.3,當(dāng)輸出低電平時,表示該位數(shù)碼管被選中。
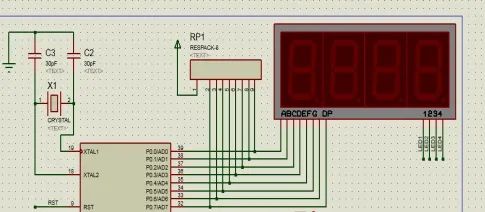
圖8數(shù)碼管電路
3.3直流電機驅(qū)動電路
L298是一款高電壓、高電流型的全橋驅(qū)動電路,輸入為TTL電平,用來驅(qū)動如繼電器、直流電機或步進電機等感性負載。兩個獨立的使能端,可以獨立的控制兩組四個輸入。
直流電機的驅(qū)動電路由L298構(gòu)成,51單片機通過P1.5~P1.7口控制L298的使能端口和輸入端口,而驅(qū)動芯片則輸出被放大的控制信號,用以控制電機運行。驅(qū)動電路如圖9所示,圖中所加4個二極管是起到保護作用。
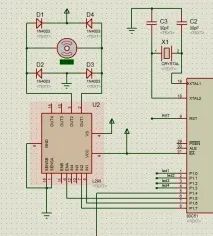
圖9直流電機驅(qū)動電路
3.4按鍵控制電路
單片機檢測按鍵的原理是:單片機的I/O口既可作為輸出也可以作為輸入使用,當(dāng)檢測按鍵時用的是它的輸入功能,我們把按鍵的一端接地,另一端與單片機的某個I/O口相連,開始時先給該I/O口賦一個高電平,然后讓單片機不斷的檢測該I/O口是否變?yōu)榈碗娖剑?dāng)按鍵閉合時,即相當(dāng)于該I/O口通過按鍵與地相連,變成低電平,程序一旦檢測到I/O變?yōu)榈碗娖絼t說明按鍵被按下,然后執(zhí)行相應(yīng)的指令。
這種按鍵在按下和松開時都會有抖動現(xiàn)象,可以采用硬件或者軟件的方式來消除抖動,為了節(jié)約成本,采用軟件延時的方式來消除抖動的影響。
為了提高單片機的工作效率,本次設(shè)計將5個按鍵通過一個與門連至單片機的外部中斷輸入口。當(dāng)有按鍵按下時,單片機停下正在做的工作,轉(zhuǎn)而執(zhí)行按鍵掃描程序,然后執(zhí)行相應(yīng)指令。按鍵控制電路如圖10所示:
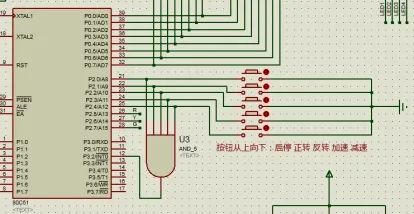
圖10按鍵控制電路
4.軟件設(shè)計
4.1主程序設(shè)計
當(dāng)程序開始運行時,不斷采集直流電機的轉(zhuǎn)速并顯示。其流程圖如圖11所示:
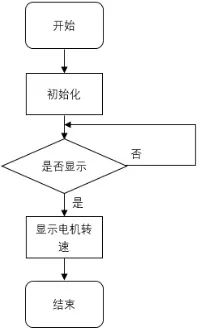
圖11主程序流程圖
4.2定時器0控制產(chǎn)生PWM波形
直流電機調(diào)速一般運用PWM原理來進行。對于直流電機來說,如果加在電樞兩端的電壓為脈動電壓,可以看出,在T不變的情況下,改變t1和t2的寬度,電壓將發(fā)生變化。

則
式中, 是常數(shù)。
是常數(shù)。
利用PWM調(diào)速的原理,也就是通過改變占空比來改變加在電機兩端的電壓,從而改變電機的轉(zhuǎn)速,其流程圖如圖12所示。
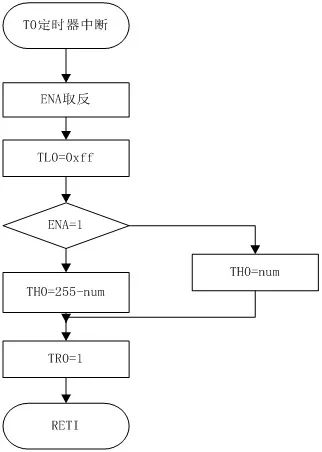
圖12PWM波形控制流程圖
直流電機在進行調(diào)速時,通過改變變量num的值實現(xiàn)。加速時,num的值增加,而TH0的初值則相應(yīng)的減小,也就是一個周期中,高電平相應(yīng)的時間延長,低電平的時間相應(yīng)減小速度增加。減速時num的值減小,也就是TH0的初值增加,一個周期中,高電平的時間減小,低電平的時間增加,速度降低。
4.3按鍵掃描程序
當(dāng)發(fā)生外部中斷時,單片機進入外部中斷程序,開始掃描按鍵,先掃描KEY0按鍵,看是否按下了起/停鍵,如果按下了該鍵,則執(zhí)行起/停程序;如果沒有則判斷KEY1鍵,看是否按下了該鍵,若果按下了,則執(zhí)行正轉(zhuǎn)程序;若果沒有判斷KEY2鍵,若該鍵按下,則執(zhí)行反轉(zhuǎn)程序;若沒有則檢測KEY3鍵是否按下,若按下,則執(zhí)行加速程序;若沒有則檢測KEY4鍵,若該鍵按下,則執(zhí)行減速程序,否則退出中斷程序。按鍵顯示程序流程圖如圖13所示。在這段中斷程序中,掃描按鍵,并執(zhí)行相應(yīng)的指令。因為把按鍵掃描程序放到外部中斷程序中,單片機只有在接收到外部中斷的申請時,才去掃描按鍵,在無按鍵按下時,不必浪費時間去掃描按鍵,提高了CPU的效率。
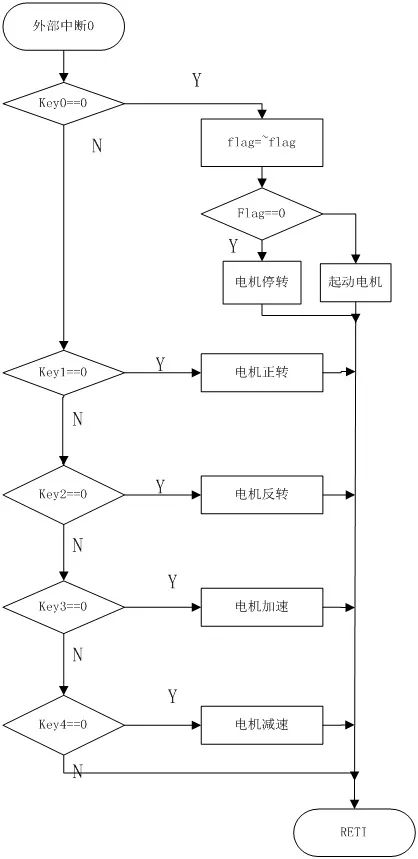
圖13外部中斷按鍵掃描程序
5.仿真分析
5.1Proteus簡介
Proteus開發(fā)平臺不僅能夠勝任PCB電路板設(shè)計制作的工作,同時還擁有進行交互式的仿真測試的功能。Proteus軟件是目前用戶最為青睞的仿真軟件,它不僅能夠完成單一電路以及混合電路的仿真與設(shè)計,同時能夠很好的和市面上常見的微型控制器系統(tǒng)兼容匹配。它完美的完成了從設(shè)計原理圖→仿真分析→代碼調(diào)試→功能測試→形成PCB的完整過程。經(jīng)過多年的發(fā)展與完善,如今無論是在性能上還是功能上都越來越值得廣大用戶的信賴。
5.2軟件仿真
這部分仿真主要是解決程序中的語法錯誤。由于程序代碼較長,在書寫過程中難免出現(xiàn)語法錯誤和函數(shù)參數(shù)類型方面的錯誤,我選擇使用keil4軟件編寫程序,通過這道程序的仿真,能基本解決這方面的錯誤,為下一步應(yīng)用proteus軟件仿真做好準(zhǔn)備。其仿真結(jié)果見圖14:
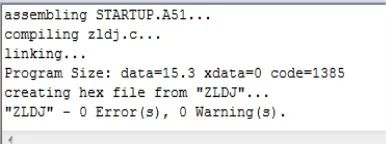
圖14源程序仿真結(jié)果
由圖可知,程序已無語法錯誤,編譯成功,并且生成hex文件,利用該文件可以與proteus軟件聯(lián)合仿真,進一步檢查程序的語法錯誤。
5.3運用proteus軟件聯(lián)合仿真
首先在proteus軟件中畫好硬件電路,并檢查硬件電路是否滿足要求。在確定硬件功能正常后,載入編譯源程序生成的hex文件,在proteus軟件中仿真運行,通過電路中各元件引腳顯示的電平狀態(tài),檢查軟件邏輯上是否存在問題。再確認沒有問題之后,開始進入仿真的環(huán)節(jié)。
點擊左下角運行之后,電機顯示0轉(zhuǎn)速,數(shù)碼管也顯示速度為0000,右下角顯示電機狀態(tài)的LED燈全滅。如圖15:
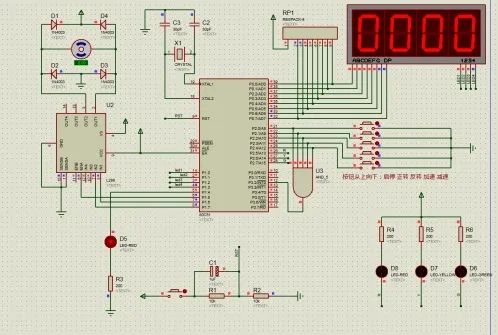
圖15開始運行
點擊啟動停止按鈕,電機開始正轉(zhuǎn),并維持一定的速度,速度顯示在數(shù)碼管上為0209,右下角紅燈亮,表示電機處在正轉(zhuǎn)狀態(tài),如圖16:
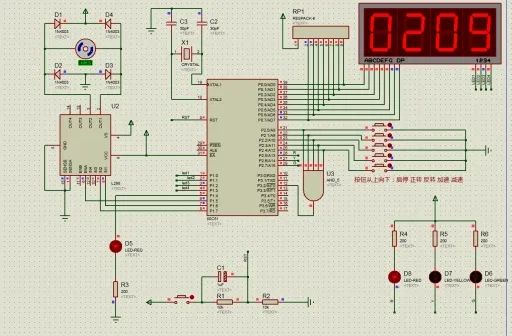
圖16點擊啟動停止按鈕后畫面
點擊反轉(zhuǎn)按鈕,電機開始反轉(zhuǎn),并維持一定的速度,速度顯示在數(shù)碼管上為-209,右下角黃燈亮,表示電機處在反轉(zhuǎn)狀態(tài),如圖17:
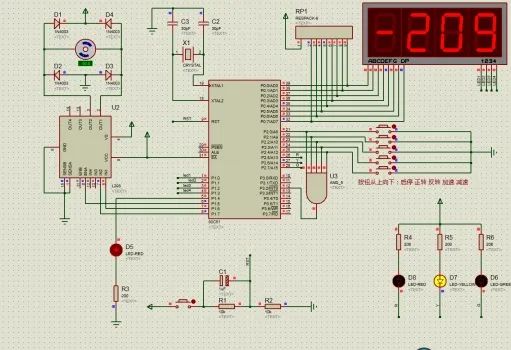
圖17點擊反轉(zhuǎn)按鈕后畫面
點擊正轉(zhuǎn)按鈕,電機開始正轉(zhuǎn),并維持一定的速度,速度顯示在數(shù)碼管上為0209,右下角紅燈亮,表示電機處在正轉(zhuǎn)狀態(tài),如圖18:
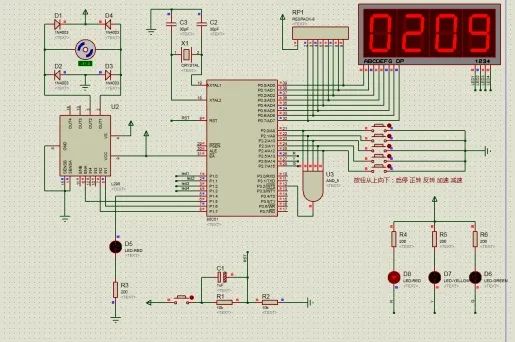
圖18點擊正轉(zhuǎn)按鈕后畫面
點擊加速按鈕,電機開始正轉(zhuǎn)加速,速度顯示在數(shù)碼管上為0220,右下角紅燈亮,表示電
機處在正轉(zhuǎn)狀態(tài),如圖19:
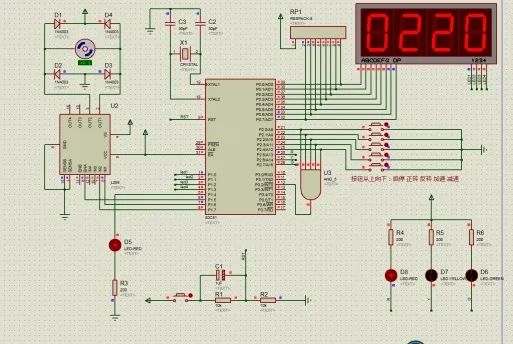
圖19點擊加速后畫面
點擊兩次減速按鈕,電機開始正轉(zhuǎn)減速,速度顯示在數(shù)碼管上為0199,右下角紅燈亮,表示電機處在正轉(zhuǎn)狀態(tài),如圖20:
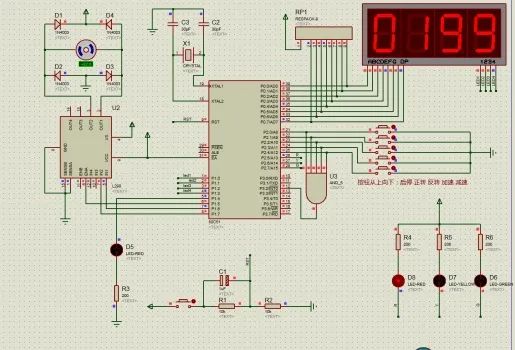
圖20點擊兩次減速按鈕后畫面
點擊啟動停止按鈕,電機停止轉(zhuǎn)動,速度顯示在數(shù)碼管上為0000,右下角綠燈亮,表示電機處在停止?fàn)顟B(tài),如圖21:
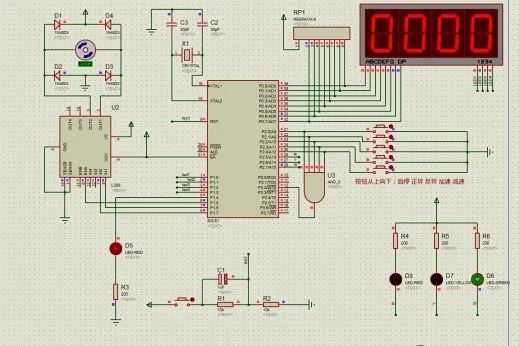
圖21點擊啟動停止按鈕后畫面
審核編輯:湯梓紅
-
單片機
+關(guān)注
關(guān)注
6022文章
44375瀏覽量
628272 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6417瀏覽量
110092 -
直流電機
+關(guān)注
關(guān)注
36文章
1692瀏覽量
69901 -
PWM
+關(guān)注
關(guān)注
114文章
5056瀏覽量
212166 -
伺服電機
+關(guān)注
關(guān)注
85文章
2003瀏覽量
57298
原文標(biāo)題:單片機直流電機的pwm調(diào)速
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
8098 單片機和伺服電機PWM 調(diào)速控制
基于Motionchip的直流無刷伺服電機運動控制系統(tǒng)設(shè)計和

基于單片機的步進電機開環(huán)控制系統(tǒng)
基于單片機控制的交流伺服電機轉(zhuǎn)速控制系統(tǒng)的設(shè)計與實現(xiàn)
交流伺服電機的單片機控制及其應(yīng)用.

AVR單片機在直流伺服控制系統(tǒng)中的應(yīng)用講解
avr單片機在直流伺服控制系統(tǒng)中的應(yīng)用
基于AVR單片機的直流無刷電機智能控制系統(tǒng)設(shè)計講解
基于AVR單片機的直流無刷電機智能控制系統(tǒng)設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論