") 結構光三維測量幾種比較成熟的方法分享
結構光三維測量幾種比較成熟的方法分享
1.飛行時間發(fā)
原理:通過直接測量光傳播的時間,確定物體的面型。發(fā)射脈沖信號,接受發(fā)射回的光,計算距離。
精度:毫米級
優(yōu)點:原理簡單,可避免陰影和遮擋等問題,且儀器便攜化。
缺點:精度相對較低
2.莫爾條紋法
原理:采用兩組光柵,一個主光柵,一個基準光柵,通過基準光柵來檢測輪廓表面的主光柵,并根據(jù)條紋規(guī)律來推算物體的輪廓面型。
優(yōu)點:過程運算量小,比較容易實現(xiàn)快速測量。
缺點:單從莫爾等高線不能判定物體凹凸,且光柵制作存在局限性,一般應用于工業(yè)在線質量檢測。
主要兩類:影像型莫爾條紋和投影型摩爾條紋
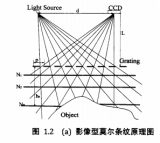
①影像型摩爾條紋
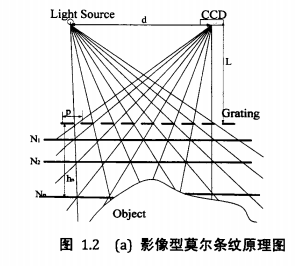
優(yōu)點:測量精度高
缺點:要求較大光柵面積,至少覆蓋待測輪廓,且光柵要緊挨待測物體
②投影莫爾法
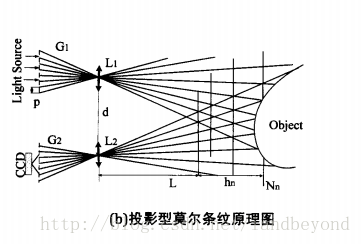
將一個光柵投射到被測物體上,旁邊使用另一個光柵觀測行程的摩爾條紋,分析觀測到的摩爾條紋,就可得到深度信息。
優(yōu)點:適合測量較大物體。
3.立體視覺法
原理:由多幅圖像(一般兩幅)來獲取物體三維幾何信息的方法。主要模仿生物,幾乎所有具備視覺的生物,都是兩個眼睛。利用成像設備從不同位置獲取被測物體的兩幅圖像,通過計算圖像對應點間的位置偏差,來獲取物體的三維幾何信息。
優(yōu)點:原理簡單,對材質顏色等物面性質及背景光等環(huán)境因素要求較低,在超大型三維測量如建筑物測量中具有不可替代的優(yōu)勢。 缺點:系統(tǒng)需要預先標定,當測量環(huán)境發(fā)生變化時,相機參數(shù)需要重新調節(jié)。很難獲取無紋理區(qū)域的信息。
4.激光三角法
原理:線掃描法的一種,是用線光源投射到待測物體表面,然后經(jīng)過一側一維的掃描,獲得整個物體的深度信息。
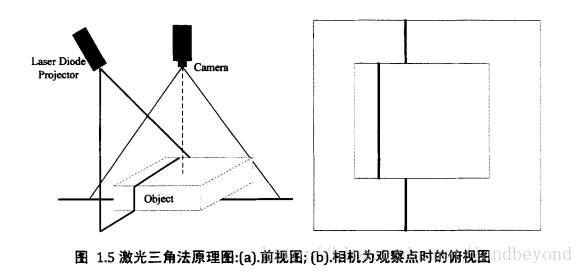
每次投射器投射一條光線到物體上,攝像機對帶有光條紋的物體成像,圖像上的光線特征恰恰對應投射器的光線。根據(jù)三角測量原理,可確定落在物體上光線的深度信息。
優(yōu)點:原理簡單,精度較高,因為使用單色性好的激光使得這種方法很少受物體表面紋理的影響相對較穩(wěn)定,因此激光三角法在精度要求較高、環(huán)境較為復雜的工業(yè)檢測領域,應用非常廣泛
缺點:由于單幀圖像得到的信息非常有限,激光三角法還需要一次一維的移動掃描,這也導致該方法效率較低。
5.結構光技術
是一種主動的三角測量技術。
原理:由光源投射可控制的光點、光條或光面結構,光在物體表面形成特征點,線或者面,并由成像系統(tǒng)捕獲圖像, 得到特征點的投射角,然后根據(jù)標定出的空間方向、位置參數(shù),利用三角法測量原理計算特征點與攝像機鏡頭主點 之間的距離。
幾種比較典型的編碼結構光方式:
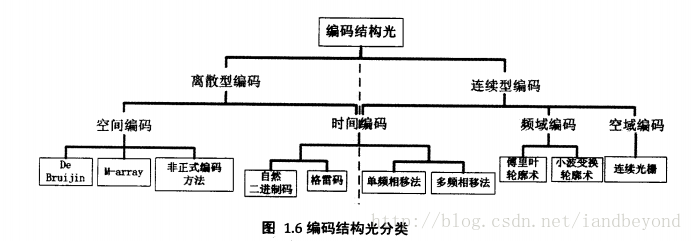
根據(jù)編碼圖案,將編碼結構光分為了離散編碼和連續(xù)編碼兩大類。
如圖1.6所示。若沿著一行掃描編碼結構光的數(shù)字投影條紋圖案,我們會發(fā)現(xiàn)離散編碼的圖案中, 碼字(codeword)相同的區(qū)域其掃描輪廓線的值也是一樣的, 而相同碼字區(qū)域的大小也很大程度上代表了重構出來的三維點云的密度; 然而,在連續(xù)編碼圖案上,掃描輪廓線則為一條連續(xù)平滑的亮度曲線,在一個周期內每個像素都有唯一的碼字, 正是如此,該方法才能夠獲得與圖像分辨率相當?shù)狞c云密度。 而時間編碼則是使用同一個像素點不同時間下的多個碼字來確定該點的位置信息。
當然,也有一些方法結合時間和空間策略共同確定位置信息。
離散型空間編碼方法大致可以分為三類:基于De aruijn的編碼方法,基于M.a(chǎn)rray的編碼方法,非正式的編碼方法。
離散型時間編碼方法主要代表有:自然二進制編碼,Gray碼。
離散型編碼可以通過空間域或時間域進行編碼實現(xiàn)。
空間編碼和時間編碼是通過碼字解碼的方式不同來區(qū)分的,空間編碼需要周圍相鄰碼字共同確定中心碼字的位置信息,
理論上講,連續(xù)性編碼方法既可以采用周期性模式,也可以采用非周期性模 式。然而非周期性模式往往限制了模板大小,目前圖像亮度等級有限,只有256 級的情況下,無法絕對唯一地標識大范圍空間。因此,周期性模式圖像配合時間 域交叉技術獲得廣泛認可。
連續(xù)性編碼方案中,最具有代表性的是相移輪廓術和傅里葉輪廓術。
①傅里葉變換輪廓術
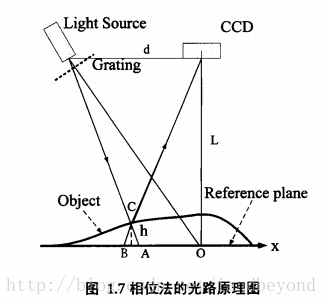
圖1.7所示。輪廓測量法利用數(shù)字濾波技術,將頻率較高的載波和頻率較低的面形分離出來,然后進行反變換,
得到包含高度信息的相位,在通過標定得到的相位高度映射關系得到三維面型信息。傅里葉變換輪廓術只用一
幅圖就可以得到相位值測量面型信息,但該方法計算量大,使用FFT產(chǎn)生的泄漏、混頻、柵欄效應等會產(chǎn)生誤差,
采用數(shù)字濾波器也需要不斷試錯才能得到正確的參數(shù)。
②相位測量輪廓術
相位測量輪廓術(PMP:Phase Measurement Profilometry)的基本思想就是
通過3F(F為相移法中采用的頻率個數(shù))張具有一定相位差的條紋圖來計算相位,然后再結合相位-高度映射關系式
計算出物體的高度分布。
相位測量輪廓術的原理同樣如圖1.7所示,將正弦光柵圖像投影到物體表面,同時用成像設備采集變形條紋。
然后開始投影第二幀正弦光柵圖案,同時采集這一幀的變形條紋……整個過程重復Ⅳ次,而每一幀圖案相對前一幀
的相移為2,r/N。
典型的幾種算法被廣泛應用于實際測量中,分別是三步相移法,四步相移法,五步相移法和六步相移法。
相比傅里葉輪廓術,相位測量輪廓術運算量要小很多,而且可以用查表法進一步降低運算量,這使得相位測量輪廓術在高速高精度實時三維測量中運用的非常廣泛。
作者為CSDN博主iandbeyond,
原文地址:https://blog.csdn.net/iandbeyond/article/details/79256932
審核編輯:劉清
-
編碼器
+關注
關注
45文章
3597瀏覽量
134179 -
激光器
+關注
關注
17文章
2488瀏覽量
60261 -
脈沖信號
+關注
關注
6文章
395瀏覽量
36918 -
傅里葉變換
+關注
關注
6文章
437瀏覽量
42566
原文標題:結構光三維測量幾種比較成熟的方法
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
光學三維測量技術的各種實現(xiàn)方法及原理
常見的三維測量方法有哪些(結構光編碼原理)

三維快速建模技術與三維掃描建模的應用
SMARTSCAN三維掃描儀電子產(chǎn)品配件三維掃描服務
結構光三維測量中影響光條中心提取的若干因素及對策
面向踝關節(jié)功能的三維測量與重建系統(tǒng)設計

智慧城市_實景三維|物業(yè)樓三維掃描案例分享_泰來三維

雙目三維光學測量硬件系統(tǒng)結構設計







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論