 導彈滾動視距角速度提取技術
導彈滾動視距角速度提取技術
當導彈滾動時,導彈的滾動角速度將與導引頭的穩定平臺耦合,導致導引頭陀螺的輸出具有基于真實LOS(視距)角速度的導彈滾動角速度相關的附加信號。基于LOS合成原理,分析了兩幀導引頭LOS角速度與導彈橫滾角速度的耦合機理。為了消除耦合效應,采用卡爾曼濾波技術提取LOS角速度,建立了卡爾曼濾波方程,并通過仿真進行了驗證。結果表明:導彈橫滾運動影響陀螺輸出,卡爾曼濾波技術提取LOS角速度可以滿足制導信息精度的要求。
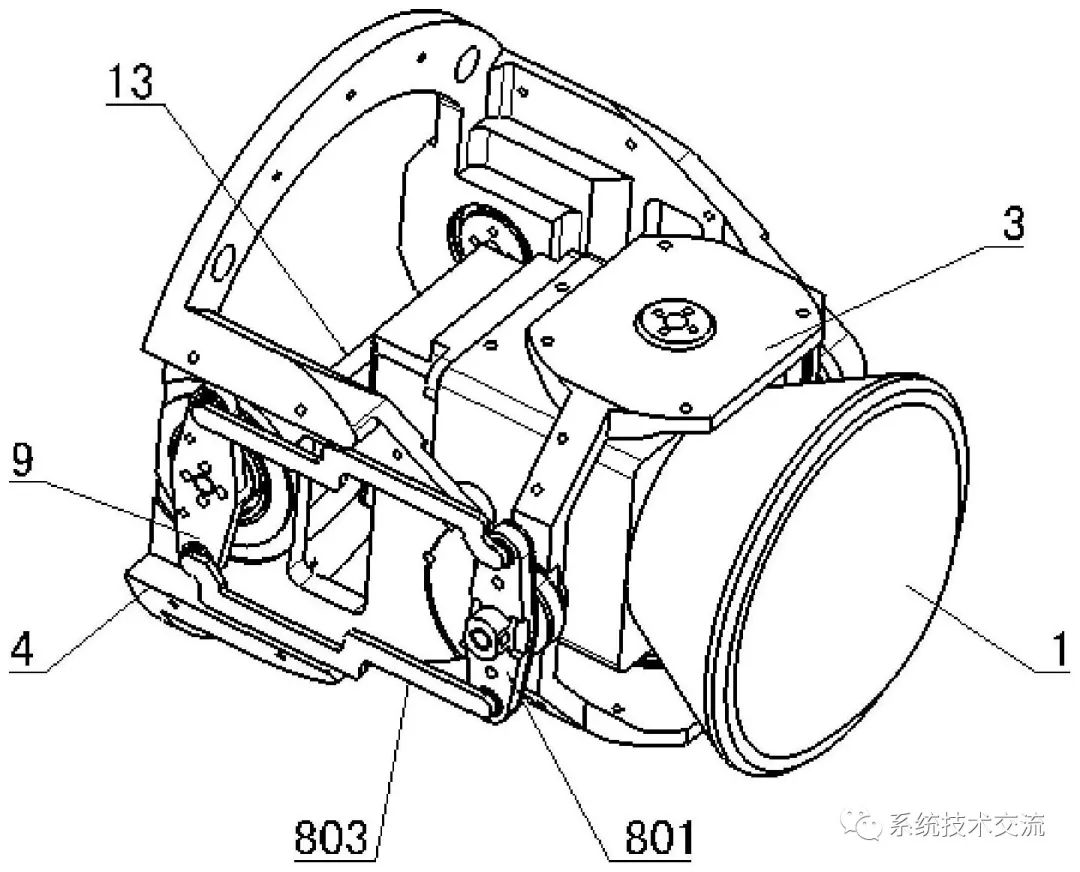
導引頭是制導回路的測量敏感元件,它為制導系統提供目標相對于導彈在俯仰和偏航方向上的運動信息。三框架平臺導引頭可以隔離導彈體在俯仰、偏航和橫滾三個方向上的運動,但其結構復雜,體積大;雙框架平臺導引頭控制簡單,體積小,但不能隔離導彈體在滾動方向上的擾動。導彈的滾動不僅帶來了俯仰和偏航通道的耦合問題,還導致速率陀螺在平臺上繞光軸旋轉,從而帶來了提取LOS角速度的問題。這個問題是可以解決的。相關報道顯示,美國已在PAC-3低速滾轉導彈中應用了雙框架雷達導引頭。
我國對滾動導彈與雙導引頭耦合機理進行了一些研究。分析了導彈橫滾角速度對LOS角速度輸出的影響,認為當電軸方向與平臺方向存在偏差時,導彈側傾擾動會額外引入LOS角速度輸出誤差。在導彈橫滾角小的假設下,研究了雙通道解耦后的單通道控制問題。針對側組轉導彈的大橫滾運動提出了一種前饋補償方案,減小了在250 °/s橫滾角速度干擾下橫滾角速度對指令輸出的影響。分析了導彈側傾對導引頭跟蹤精度的影響,提出了橫滾角速度的前饋補償控制方案。分析了角速度及其垂直于LOS的分量,這是由于目標在導引頭視場內移動時LOS相對于光軸的運動引起的。本文在已有研究的基礎上,研究了導彈側傾情況下LOS角速度的提取方法。

卡爾曼濾波技術已廣泛應用于狀態估計、預測、數據平滑等。將卡爾曼濾波應用于目標跟蹤,設計了導引頭平臺的卡爾曼跟蹤模型。卡爾曼濾波用于估計帶有并聯導引頭的旋轉導彈的LOS角速度。針對機動目標被動跟蹤問題,利用卡爾曼濾波利用導引頭角度信息估計制導信息。因此,考慮卡爾曼濾波可以解決導彈旋轉時制導信息提取的問題。
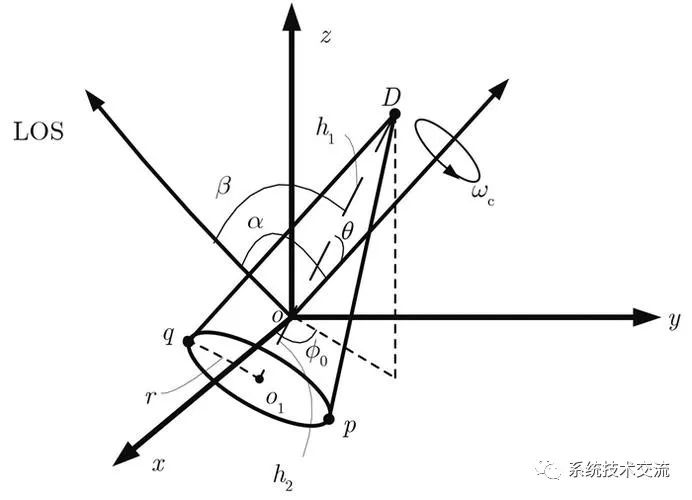
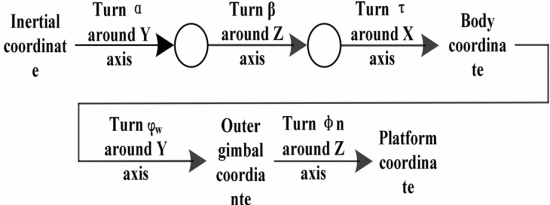
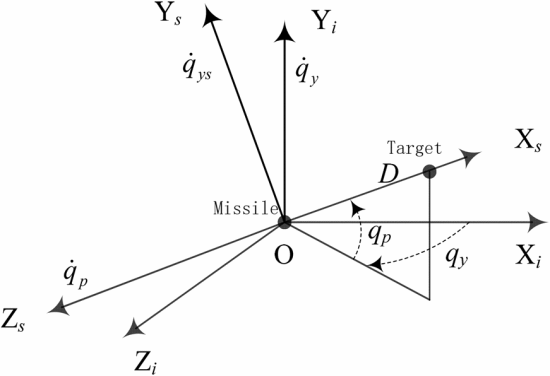
首先,基于運動合成原理,分析了導彈橫滾對導引頭平臺上陀螺輸出的影響,推導了導彈滾轉與導引頭陀螺輸出的耦合機理;針對這一問題,提出卡爾曼濾波提取LOS角速度。建立卡爾曼濾波方程,利用估計狀態量提取LOS角速度。最后,通過硬件在環仿真和數值仿真驗證了本文提出的理論和方法。
在實際工程中,當導彈體的橫滾角速度較大時,橫滾角速度會耦合到LOS角速度中,導致陀螺輸出誤差增大,超出了制導系統可以承受的誤差范圍。下面將詳細分析這種耦合機制。
基于卡爾曼濾波的LOS角速度提取
為了便于分析,假設目標擬合一個恒定加速度運動模型,即慣性系統中目標加速度在各軸上的投影為一個常值,將目標加速度的差分視為隨機白噪聲。當卡爾曼濾波方程建立后,可以將狀態向量X(t)(作為方程(8))作為導彈和目標在慣性坐標系中的相對位置、相對速度和相對加速度。由于導彈的加速度可以通過慣性導航系統測量。

根據導彈本體的姿態角、導引頭穩定平臺的框架角和LOS的誤差角,可以計算出導引頭的LOS角。因此,認為導引頭的LOS角度是可測量的。
仿真結果與分析
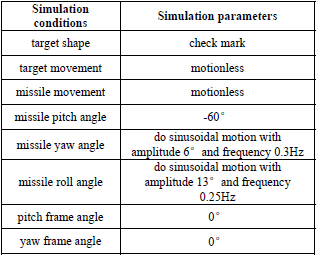
為了驗證前面的討論,使用了硬件在環仿真和數值仿真相結合的方法。使用某種類型的導引頭作為模擬對象,安裝在五軸轉盤上,模擬導彈飛行環境。導引頭安裝在三軸轉盤上,可以模擬導彈的俯仰、偏航和橫滾運動。目標模擬器安裝在兩軸轉盤上,可以模擬目標在LOS坐標系中的俯仰和偏航運動。模擬條件設置如下:
表一.仿真條件和參數
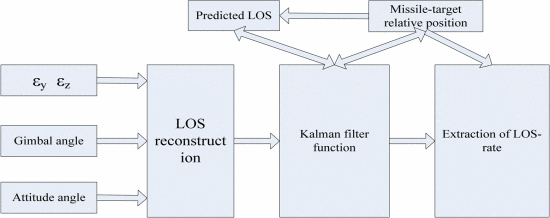
硬件在環仿真完成后,提取實驗數據,在Matlab環境下運行卡爾曼濾波程序,分析LOS角速度提取的改進情況。卡爾曼濾波程序的邏輯關系如圖3所示。
通過分析硬件在環仿真的結果,我們可以得到俯仰和偏航方向的陀螺儀輸出與導彈體的橫滾角速率之間的比較,如圖4所示。觀察陀螺儀的輸出和導彈的滾動速度,我們可以看到它們的相位是一致的,這證明滾動速度會耦合到陀螺儀的輸出中,正如前面論文中推導的那樣。由于導彈和目標都是靜止的,因此理想的LOS角速度為零。從圖4可以看出,陀螺輸出的LOS角速度噪聲較大,俯仰陀螺的誤差峰值可達5°/s,方差為1.56°/s,偏航陀螺的誤差峰值可達2.1°/s,方差為0.43°/s。這超出了制導系統的允許誤差范圍。在導彈橫滾的情況下,陀螺儀的輸出不能代表真實的LOS角速度,這與之前的推導一致。因此,需要一種新的方法來提取LOS角速度來完成引導環路。新方法不應受到導彈滾動的影響。
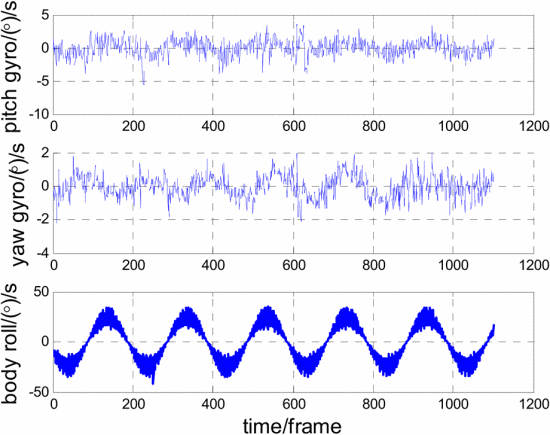
陀螺儀輸出和導彈滾動速率
在硬件在環仿真提供的數據基礎上,使用卡爾曼濾波器得到LOS角速度。結果如圖5所示。可以看出,與陀螺儀的直接輸出值相比,基于卡爾曼濾波技術提取的LOS角速度精度有了很大的提高,誤差峰值約為0.02°/s,滿足制導系統的要求,可用于制導。由于卡爾曼濾波中使用的可測參數大多受導彈滾動的影響,因此提取的LOS角速度也具有一定的周期性。
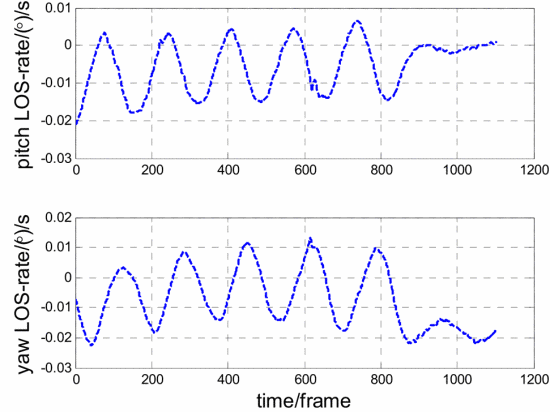
卡爾曼濾波提取LOS角速度
雙框架平臺導引頭無法隔離導彈的滾動運動,導彈滾動角速度與平臺陀螺輸出耦合,陀螺輸出與實際LOS角速度存在較大差異。采用卡爾曼濾波技術提取LOS角速度可以減少耦合的影響,大大提高LOS角速度提取的精度,提高制導信息的質量。
-
陀螺
+關注
關注
0文章
23瀏覽量
14807 -
模型
+關注
關注
1文章
3178瀏覽量
48730 -
卡爾曼濾波
+關注
關注
3文章
162瀏覽量
24636
原文標題:導彈滾動視距角速度提取技術
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論