 基于SAM實現自動分割遙感圖像實例
基于SAM實現自動分割遙感圖像實例
1. 背景
借助大量的訓練數據(SA-1B),Meta AI Research 提出的基礎 "Segment Anything Model"(SAM)表現出了顯著的泛化和零樣本能力。盡管如此,SAM 表現為一種類別無關的實例分割方法,嚴重依賴于先驗的手動指導,包括點、框和粗略掩模。此外,SAM 在遙感圖像分割任務上的性能尚未得到充分探索和證明。
本文考慮基于 SAM 基礎模型設計一種自動化實例分割方法,該方法將語義類別信息納入其中,用于遙感圖像。受prompt learning啟發,本文通過學習生成合適的Prompt來作為 SAM 的輸入。這使得 SAM 能夠為遙感圖像生成語義可辨別的分割結果,該方法稱之為 RSPrompter。
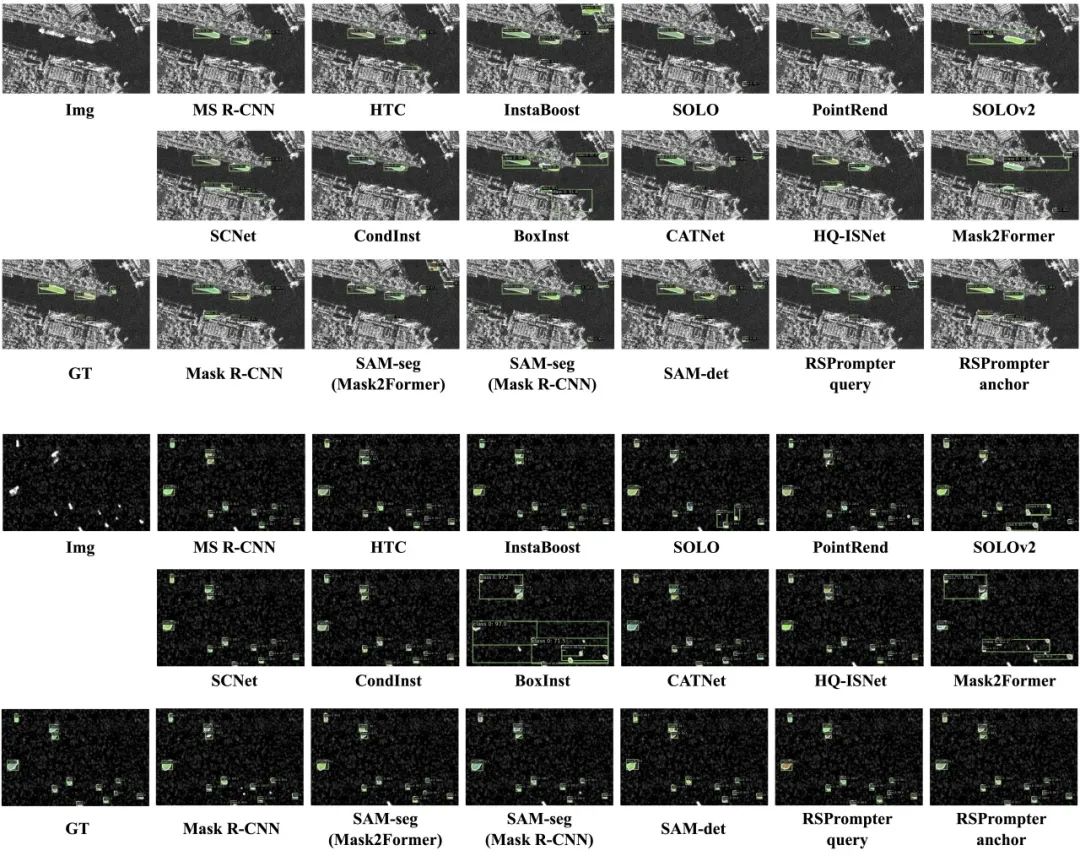
本文還根據 SAM 社區的最新發展提出了幾個基于SAM的實例分割衍生方法,并將它們的性能與 RSPrompter 進行了比較。在 WHU Building、NWPU VHR-10 和 SSDD 數據集上進行的廣泛實驗結果驗證了所提出的方法的有效性。
由于在超過十億個掩模上進行訓練,SAM 可以在不需要額外訓練的情況下分割任何圖像中的任何對象,展示了其在處理各種圖像和對象時顯著的泛化能力。這為智能圖像分析和理解創建了新的可能性和途徑。然而,由于其交互式框架,SAM 需要提供先驗的Prompt,例如點、框或掩模來表現為一種類別無關分割方法, 如下圖(a)所示。顯然,這些限制使 SAM 不適用于遙感圖像的全自動解譯。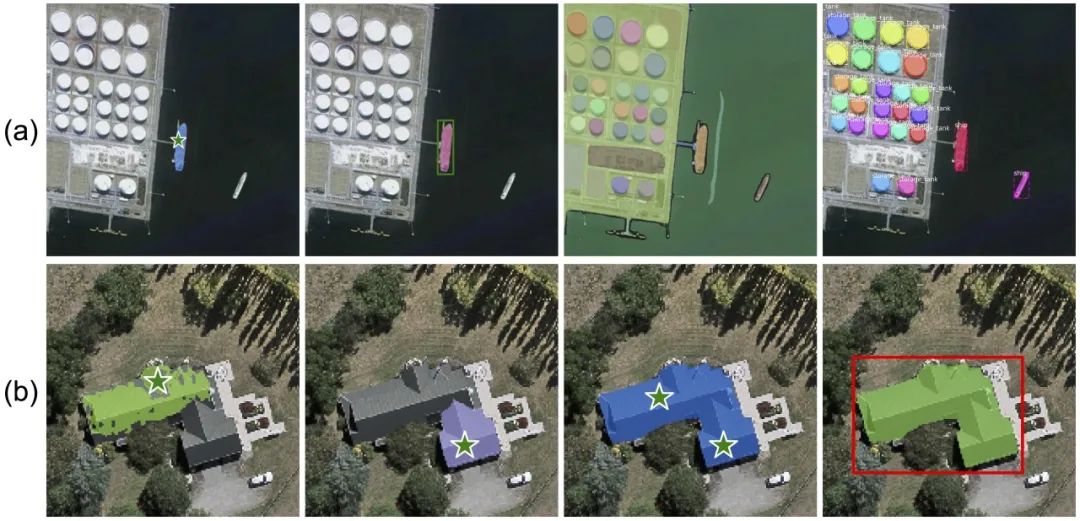
(a)顯示了基于點、基于框、SAM 的“全圖”模式(對圖像中的所有對象進行分割)以及 RSPrompter 的實例分割結果。SAM 執行類別無關的實例分割,依賴于手動提供的先驗prompt。(b)展示了來自不同位置的點prompt、基于兩個點的prompt和基于框的prompt的分割結果。prompt的類型、位置和數量嚴重影響 SAM 的結果。
此外,我們觀察到遙感圖像場景中的復雜背景干擾和缺乏明確定義的物體邊緣對 SAM 的分割能力構成重大挑戰。SAM 很難實現對遙感圖像目標的完整分割,其結果嚴重依賴于prompt類型、位置和數量。在大多數情況下,精細的手動prompt對于實現所需效果至關重要,如上圖(b)所示。這表明 SAM 在應用于遙感圖像的實例分割時存在相當大的限制。
為了增強基礎模型的遙感圖像實例分割能力,本文提出了RSPrompter,用于學習如何生成可以增強 SAM 框架能力的prompt。本文的動機在于 SAM 框架,其中每個prompt組可以通過掩碼解碼器獲取實例化掩碼。想象一下,如果我們能夠自動生成多個與類別相關的prompt,SAM 的解碼器就能夠產生帶有類別標簽的多個實例級掩碼。
然而,這個過程存在兩個主要挑戰:(i)類別相關的prompt從哪里來?(ii)應選擇哪種類型的prompt作為掩膜解碼器的輸入? 由于 SAM 是一種類別無關的分割模型,其編碼器的深度特征圖無法包含豐富的語義類別信息。為了克服這一障礙,我們提取編碼器的中間層特征以形成Prompter的輸入,該輸入生成包含語義類別信息的prompt。其次,SAM 的prompt包括點(前景/背景點)、框或掩膜。考慮到生成點坐標需要在原始 SAM prompt的流形中搜索,這嚴重限制了prompt器的優化空間,我們進一步放寬了prompt的表示,并直接生成prompt嵌入,可以理解為點或框的嵌入,而不是原始坐標。
這種設計還避免了從高維到低維再返回到高維特征的梯度流的障礙,即從高維圖像特征到點坐標,然后再到位置編碼。 本文還對 SAM 模型社區中當前進展和衍生方法進行了全面的調查和總結。這些主要包括基于 SAM 骨干網絡的方法、將 SAM 與分類器集成的方法和將 SAM 與檢測器結合的技術。
2. 方法
2.1 SAM模型
SAM 是一個交互式分割框架,它根據給定的prompt(如前景/背景點、邊界框或掩碼)生成分割結果。它包含三個主要組件:圖像編碼器、prompt編碼器和掩膜解碼器。SAM 使用基于 Vision Transformer (ViT)的預訓練掩碼自編碼器將圖像處理成中間特征,并將先前的prompt編碼為嵌入Tokens。隨后,掩膜解碼器中的交叉注意力機制促進了圖像特征和prompt嵌入之間的交互,最終產生掩膜輸出。該過程可以表達為: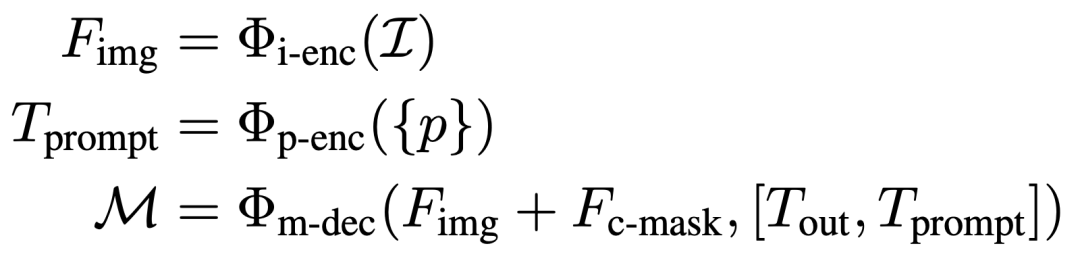
2.2 SAM 的實例分割擴展
除了本文中提出的 RSPrompter 之外,還介紹了其他三種基于 SAM 的實例分割方法進行比較,如下圖(a)、(b) 和 (c) 所示。本文評估了它們在遙感圖像實例分割任務中的有效性并啟發未來的研究。
這些方法包括:外部實例分割頭、分類掩碼類別和使用外部檢測器,分別稱為SAM-seg、SAM-cls 和 SAM-det。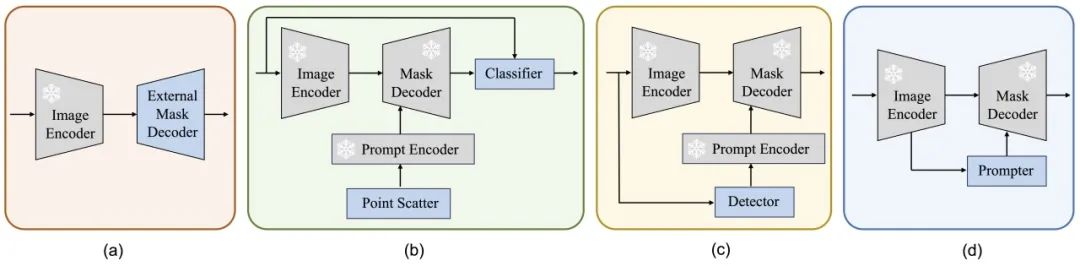
2.2.1 SAM-seg
SAM-seg利用了 SAM 圖像編碼器存在的知識,同時保持編碼器不變。它從編碼器中提取中間層特征,使用卷積塊進行特征融合,然后使用現有的實例分割(Mask R-CNN和 Mask2Former)執行實例分割任務。這個過程可以表示為: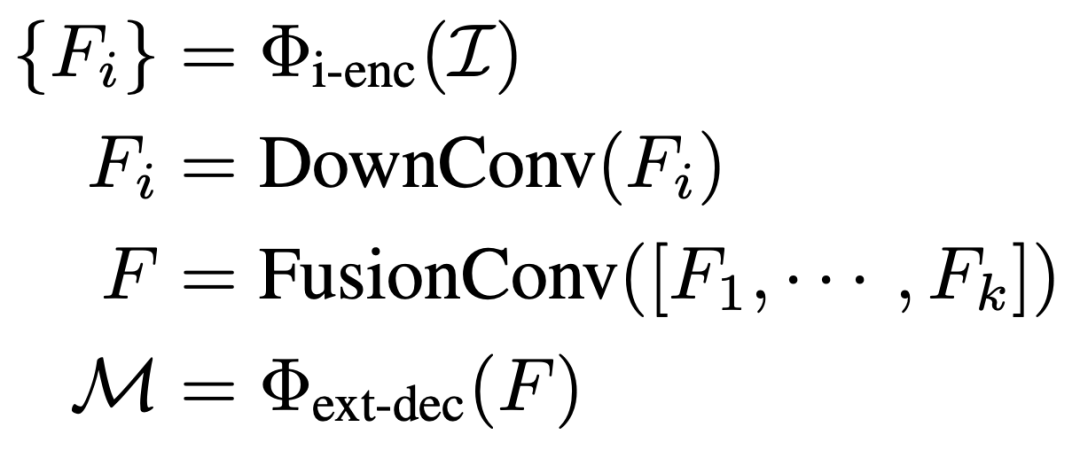
2.2.2 SAM-cls
在 SAM-cls 中,首先利用 SAM 的“全圖像”模式來分割圖像中的所有潛在實例目標。其實現方法是在整個圖像中均勻分布點并將每個點視為實例的prompt輸入。在獲得圖像中所有實例掩碼后,可以使用分類器為每個掩碼分配標簽。這個過程可以描述如下: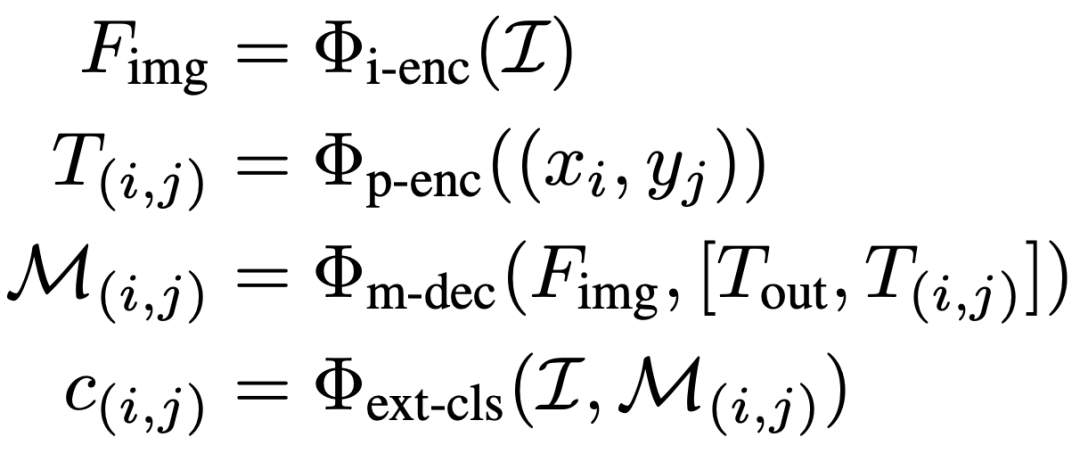
為了便捷,本文直接使用輕量級的 ResNet18 來標記掩碼。其次,可以利用預訓練的 CLIP 模型,使 SAM-cls 能夠在不進行額外訓練的情況下運行以達到零樣本的效果
2.2.3 SAM-det
SAM-det 方法更加簡單直接,已經被社區廣泛采用。首先訓練一個目標檢測器來識別圖像中所需的目標,然后將檢測到的邊界框作為prompt輸入到 SAM 中。整個過程可以描述為: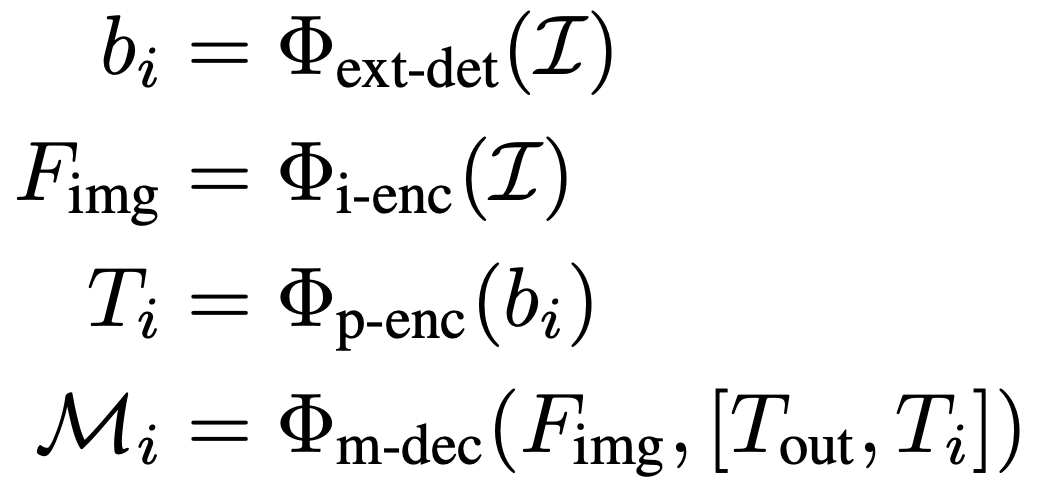
2.3 RSPrompter
2.3.1 概述
上圖(d)展示了所提出的RSPrompter的結構,我們的目標是訓練一個面向SAM的prompter,可以處理測試集中的任何圖像,同時定位對象,推斷它們的語義類別和實例掩碼,可以表示為以下公式: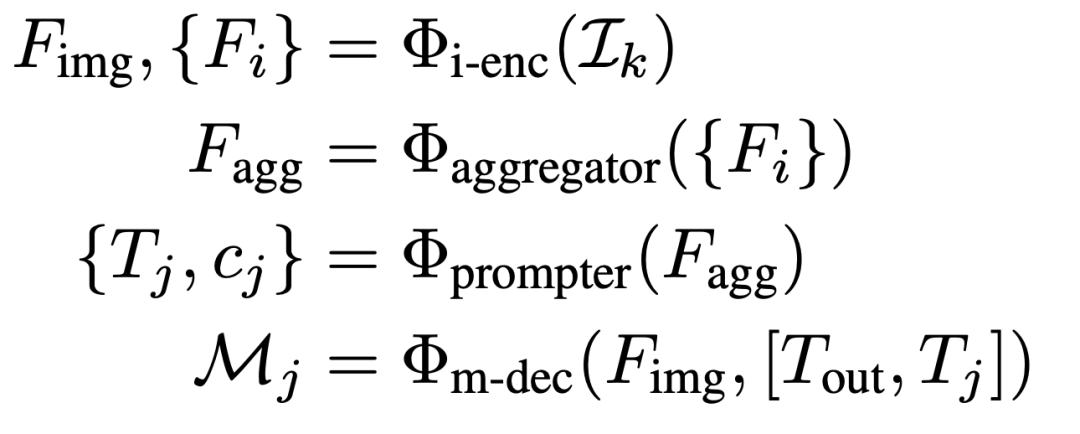
圖像通過凍結的SAM圖像編碼器處理,生成Fimg和多個中間特征圖Fi。Fimg用于SAM解碼器獲得prompt-guided掩碼,而Fi則被一個高效的特征聚合和prompt生成器逐步處理,以獲取多組prompt和相應的語義類別。為設計prompt生成器,本文采用兩種不同的結構,即錨點式和查詢式。
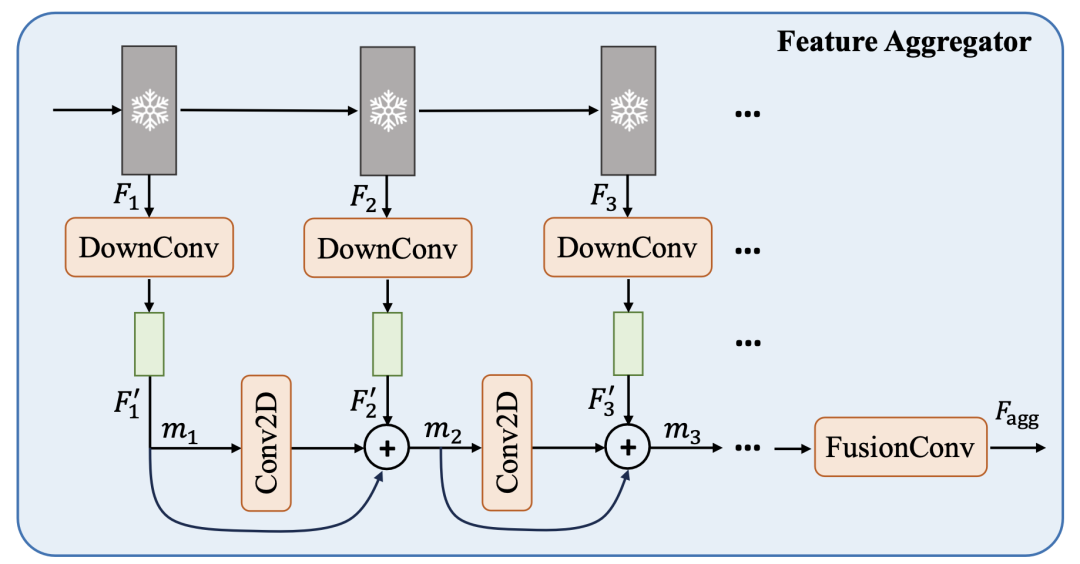
2.3.2特征聚合器
SAM是基于prompt的類別無關的分割模型,為了在不增加prompter計算復雜度的情況下獲得語義相關且具有區分性的特征,本文引入了一個輕量級的特征聚合模塊。如下圖所示,該模塊學習從SAM ViT骨干網絡的各種中間特征層中表示語義特征,可以遞歸地描述為: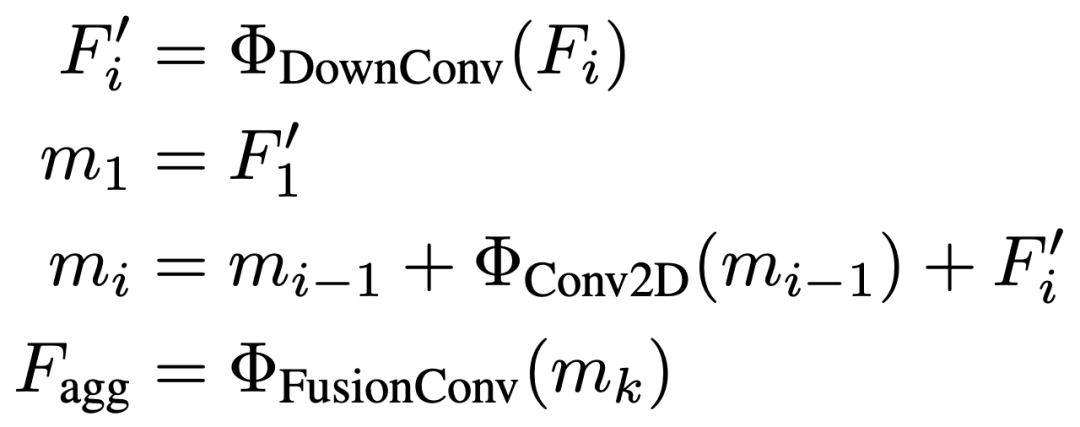
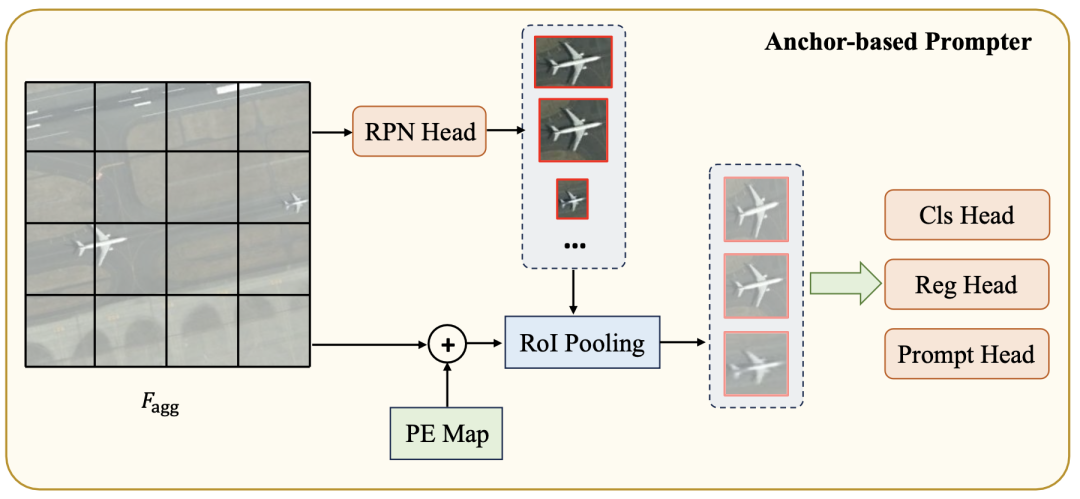
2.3.3 錨點式Prompter 架構:
首先使用基于錨點的區域提議網絡(RPN)生成候選目標框。接下來,通過RoI池化獲取來自位置編碼過的特征圖的單個對象的視覺特征表示。從視覺特征中派生出三個感知頭:語義頭、定位頭和prompt頭。語義頭確定特定目標類別,而定位頭在生成的prompt表示和目標實例掩碼之間建立匹配準則,即基于定位的貪心匹配。prompt頭生成SAM掩碼解碼器所需的prompt嵌入。整個過程如下圖所示,可以用以下公式表示: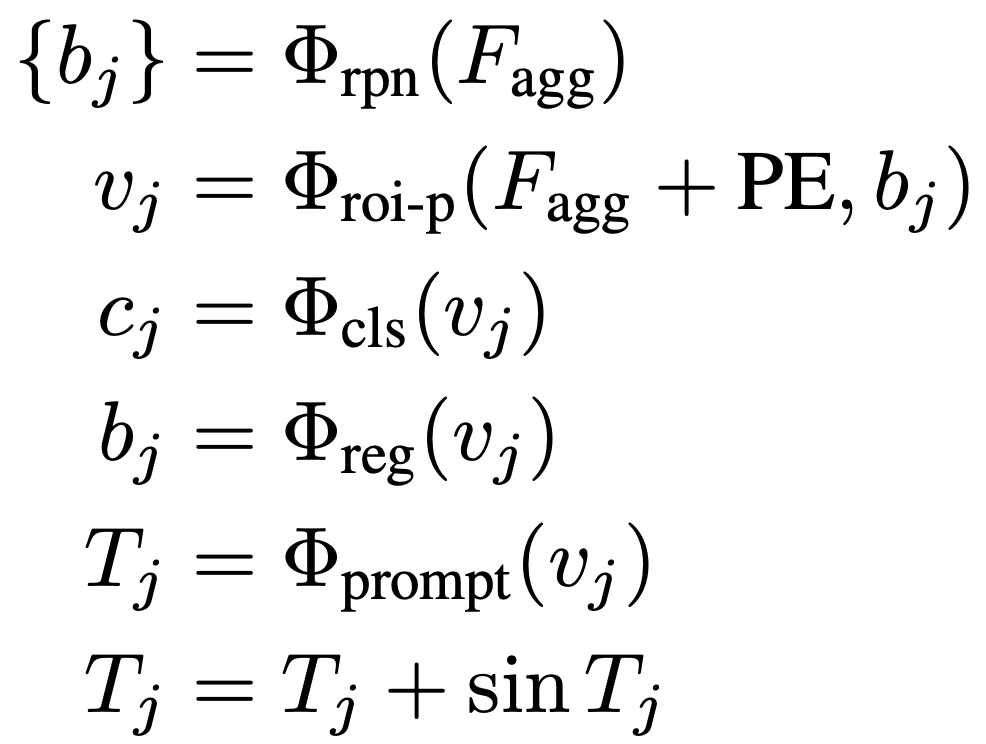
損失:該模型的損失包括RPN網絡的二元分類損失和定位損失,語義頭的分類損失,定位頭的回歸損失以及凍結的SAM掩碼解碼器的分割損失。總損失可以表示為:
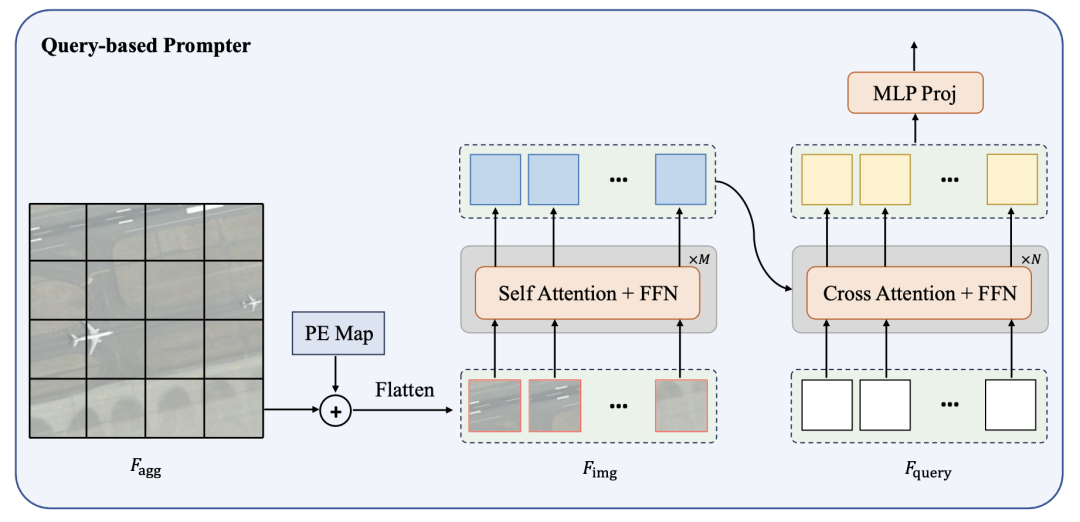
2.3.4查詢式Prompter 架構:
錨點式Prompter相對復雜,涉及到利用邊界框信息進行掩碼匹配和監督訓練。為了簡化這個過程,提出了一個基于查詢的Prompter,它以最優傳輸為基礎。查詢式Prompter主要由輕型Transformer編碼器和解碼器組成。編碼器用于從圖像中提取高級語義特征,而解碼器則通過與圖像特征進行attention交互,將預設的可學習查詢轉換為SAM所需的prompt嵌入。整個過程如下圖所示,可以表示為: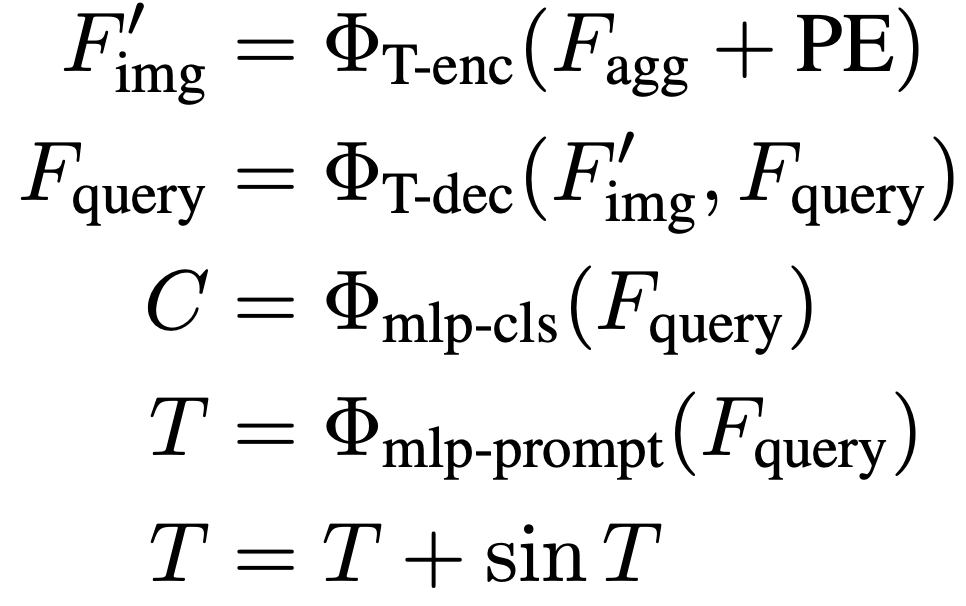
損失:查詢式Prompter的訓練過程主要涉及兩個關鍵步驟:(i)將由SAM掩碼解碼器解碼的掩碼與真實實例掩碼進行匹配;(ii)隨后使用匹配標簽進行監督訓練。在執行最優傳輸匹配時,我們定義考慮預測的類別和掩碼的匹配成本,如下所示: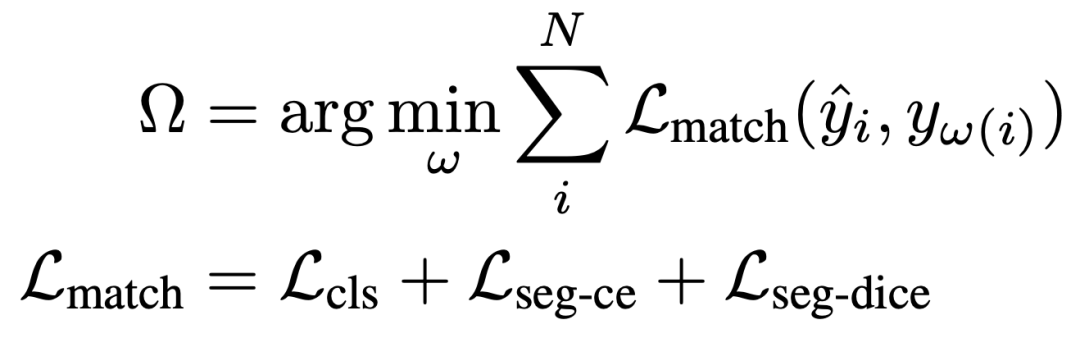
一旦每個預測實例與其相應的真實值配對,就可以應用監督項。這主要包括多類分類和二進制掩碼分類,如下所述: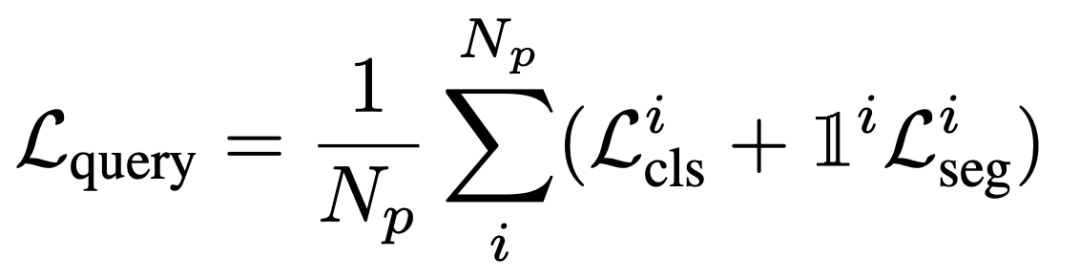
3. 實驗
在本文中使用了三個公共的遙感實例分割數據集:WHU建筑提取數據集,NWPU VHR-10數據集和SSDD數據集。WHU數據集是單類建筑物目標提取分割,NWPU VHR-10是多類目標檢測分割,SSDD是SAR船只目標檢測分割。使用 mAP 進行模型性能評價。
3.1 在WHU上的結果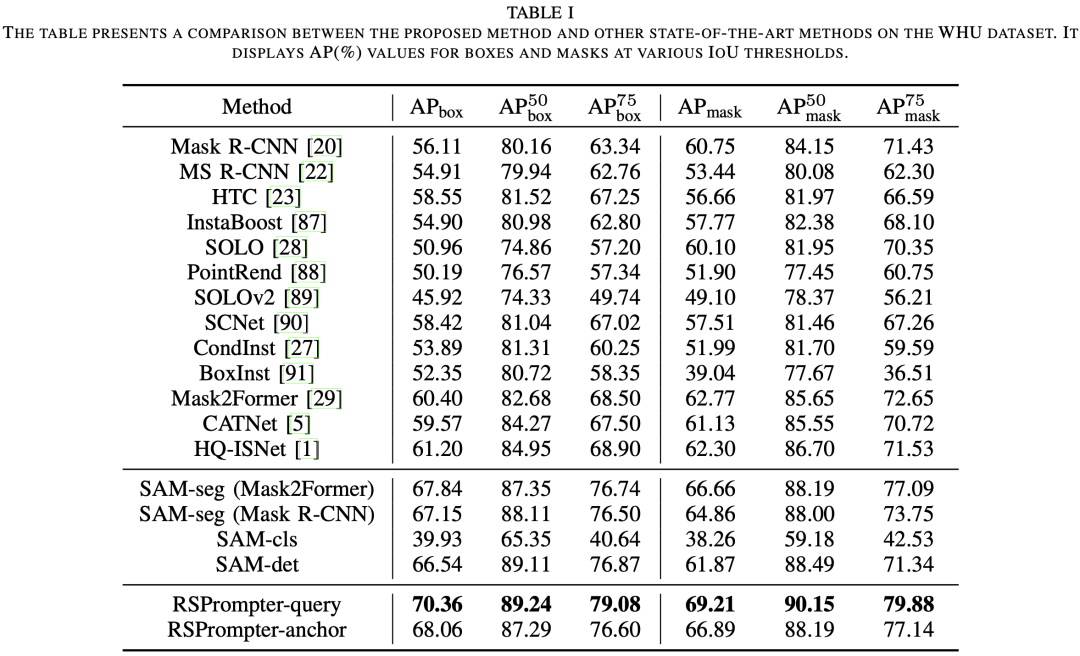
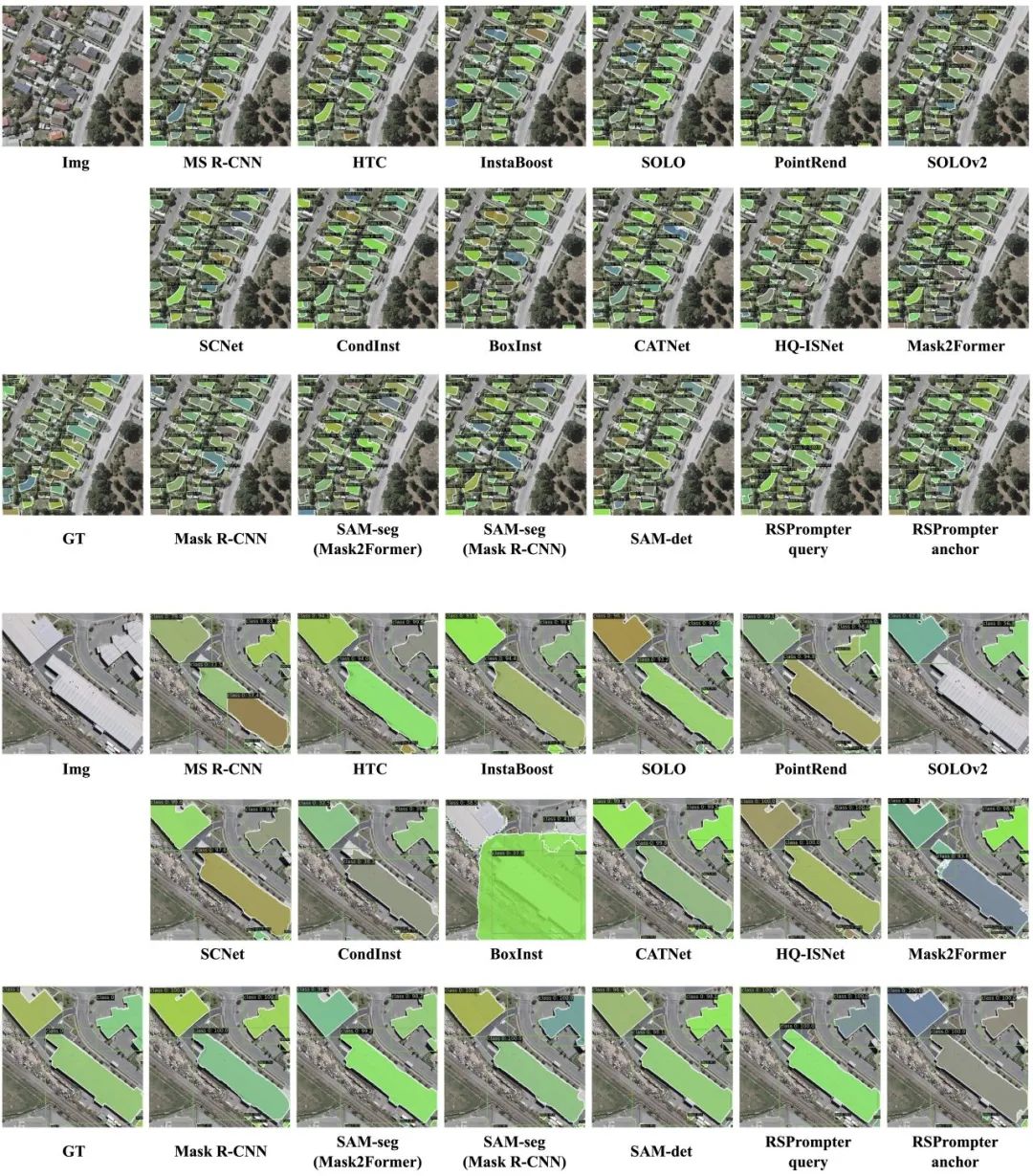
3.2 在NWPU上的結果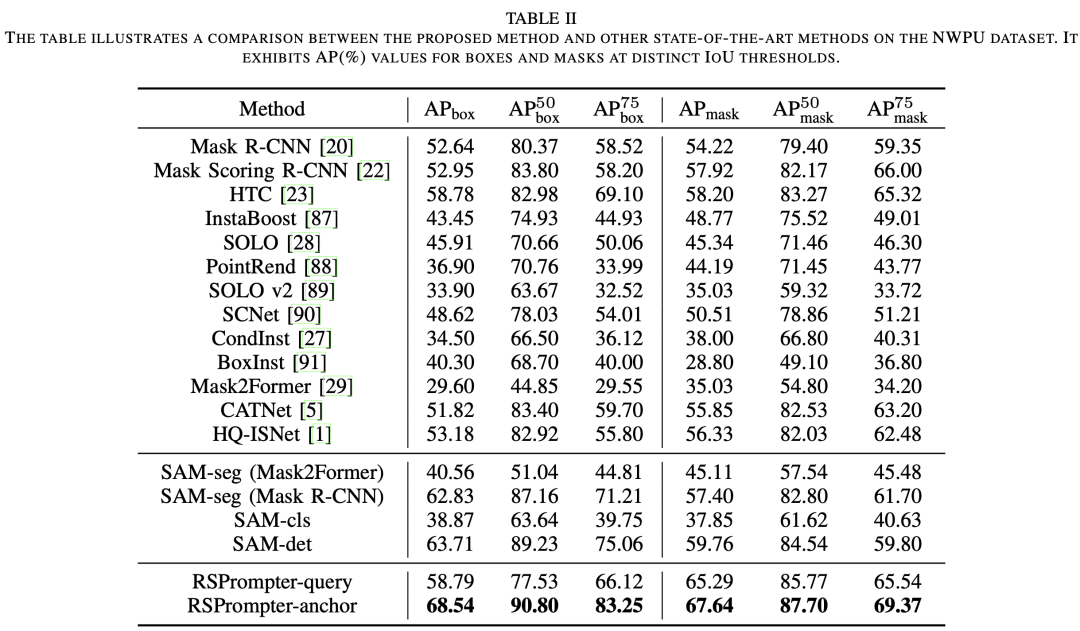
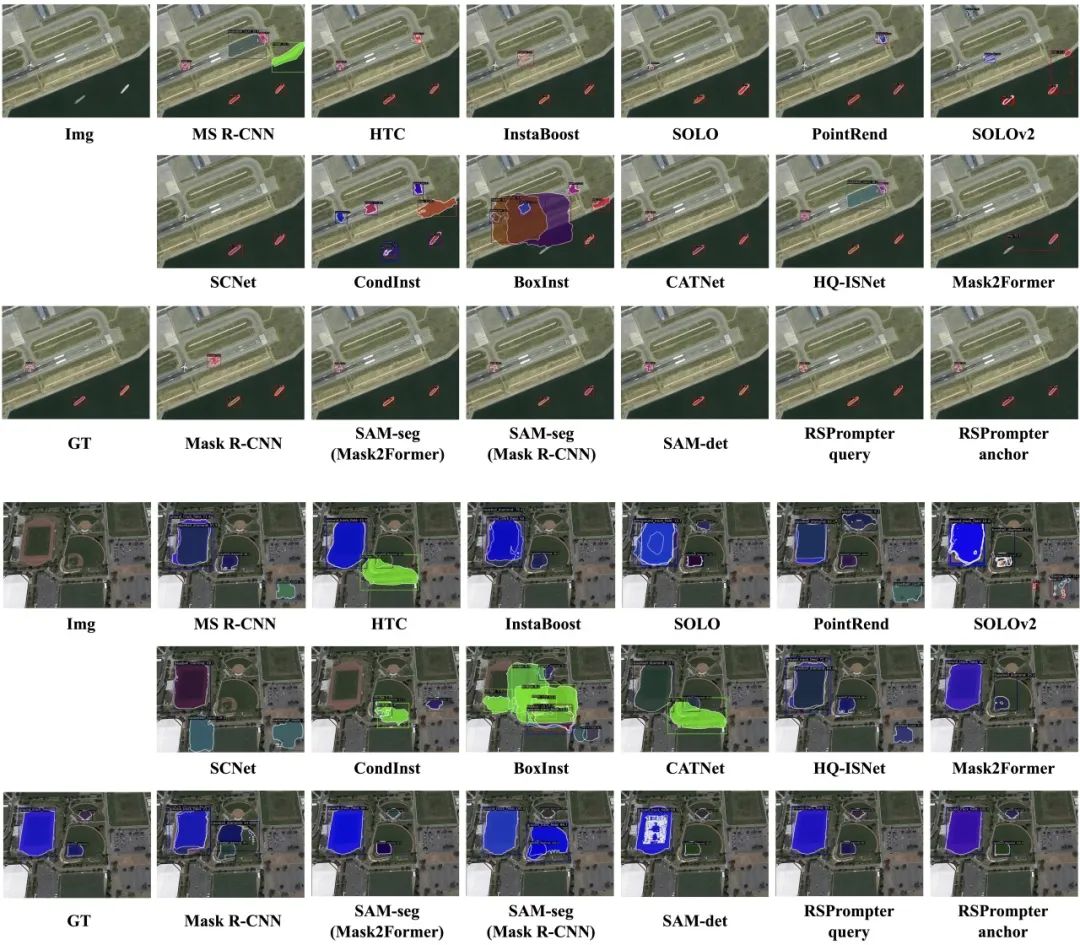
3.3 在SSDD上的結果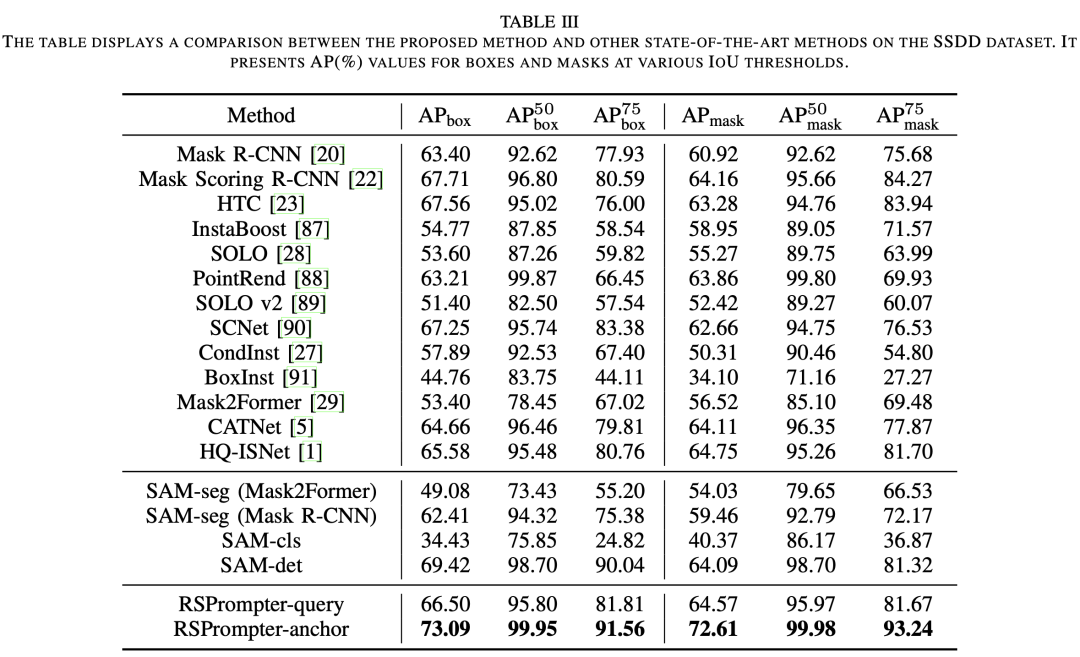
4. 總結
在本文中,我們介紹了RSPrompter,這是一種用于遙感圖像實例分割的prompt learning方法,利用了SAM基礎模型。RSPrompter的目標是學習如何為SAM生成prompt輸入,使其能夠自動獲取語義實例級掩碼。相比之下,原始的SAM需要額外手動制作prompt,并且是一種類別無關的分割方法。RSPrompter的設計理念不局限于SAM模型,也可以應用于其他基礎模型。
基于這一理念,我們設計了兩種具體的實現方案:基于預設錨點的RSPrompter-anchor和基于查詢和最優傳輸匹配的RSPrompter-query。此外,我們還調查并提出了SAM社區中針對此任務的各種方法和變體,并將它們與我們的prompt learning方法進行了比較。通過消融實驗驗證了RSPrompter中每個組件的有效性。同時,三個公共遙感數據集的實驗結果表明,我們的方法優于其他最先進的實例分割技術,以及一些基于SAM的方法。
審核編輯:劉清
-
解碼器
+關注
關注
9文章
1130瀏覽量
40676 -
編碼器
+關注
關注
45文章
3592瀏覽量
134145 -
SAM
+關注
關注
0文章
112瀏覽量
33500 -
圖像編碼
+關注
關注
0文章
26瀏覽量
8305
原文標題:RSPrompter:遙感圖像實例分割利器,基于SAM實現自動分割
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

圖像分割基礎算法及實現實例

近期分割大模型發展情況

自動駕駛場景圖像分割(Unet)

SAM 到底是什么

YOLOv8最新版本支持SAM分割一切
基于SAM設計的自動化遙感圖像實例分割方法






 工商網監
工商網監
評論