 了解為高分辨率、高幀率CMOS圖像傳感器設計供電方案的挑戰
了解為高分辨率、高幀率CMOS圖像傳感器設計供電方案的挑戰
摘要
了解為當今高分辨率、高幀率CMOS圖像傳感器設計供電方案的關鍵挑戰,是設計一個滿足每位設計工程師要求的含LDO (DC-DC, PMIC)的優化的電源系統方案的關鍵要素。電源系統設計人員需要知道不同應用中的電源方案有何不同,比方說,一個800萬像素(MP)的相機與一個5000萬像素的相機的電源方案有何不同,或幀率的不同(30 fps、60 fps、120 fps)如何改變他們的電源設計,多大頻率需要高電源抑制比(PSRR),等等。本文意在強調在為當今任何圖像傳感器確定供電方案之前的基本考量。
前言
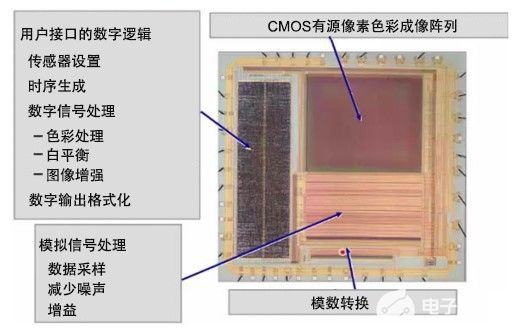
任何CMOS成像系統都含一個有源像素區和光電探測器,光電探測器用于捕獲光子并將其轉換成非常小的光電流或電子。不同的部分讀取數據,包括ADC、模擬信號處理、用戶接口數字邏輯、計時等。在飛安(Femto amp)范圍內的少量光電二極管電流在曝光時間(打開快門)內被整合成少量的電荷,由ADC轉換成可讀的的電壓。
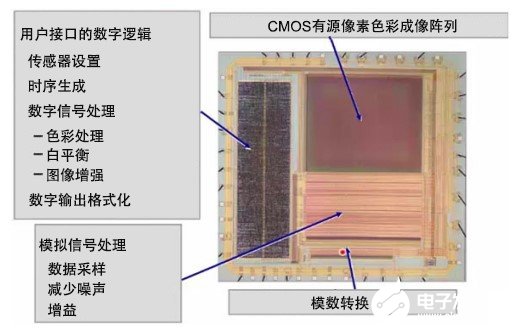
圖1. 典型的CMOS成像儀結構
像素、分辨率和晶體管設計
每個像素也有一個填充系數,取決于使用的總像素區域的百分比,并有兩個部分,光敏和非光敏部分。光敏區捕獲光線,而非光敏區則用于ADC、數字塊、接口和其他功能。
其余區域用于水平或垂直讀出,其中典型的READ 或WRITE序列由主機開始,在總線上產生一個啟動條件。
CMOS圖像傳感器的分辨率是總的像素陣列數,像素陣列由許多列和行組成。例如,一個典型的200萬像素的相機像素陣列可能是1600 x 1200。
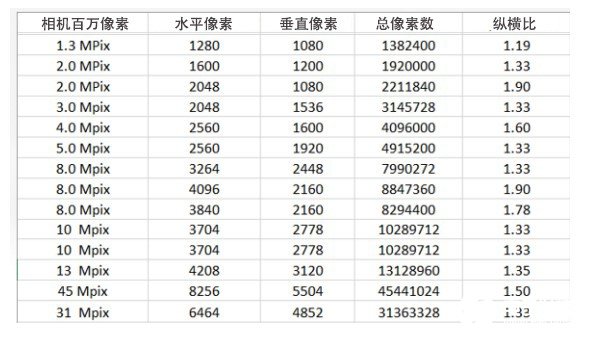
圖2. 常見相機像素列表
列和行上的一些像素被稱為暗像素,在光學上是黑色的,在內部用于黑電平校正或行噪聲校正,這將導致實際有源像素陣列或陣列中實際有效像素的減少。
有許多不同的像素晶體管設計(3T、4T、5T),如下面所示的四晶體管(4T)像素設計。光電二極管將接收到的光子轉化為少量的電荷,有一些開關用于選擇不同的列和行。為了不干擾光電二極管的讀數,光電二極管結上的高阻抗放大器被用作源跟隨器放大器(TIA/SIA)。為了不干擾光電二極管的讀數,光電二極管結點上的高阻抗放大器被用作源跟隨放大器(TIA/SF Amp)來驅動每列總線。
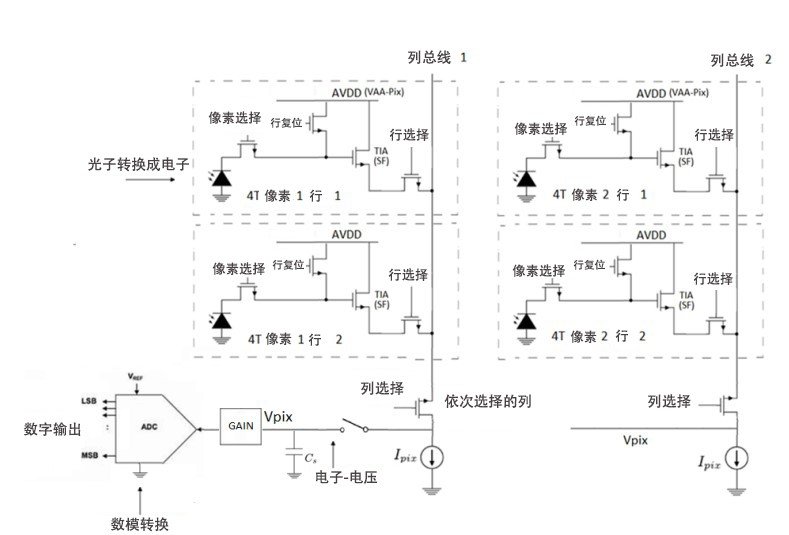
圖3. 四晶體管設計示例
每個像素電壓一次讀取一行并放入列電容器 (Cs),然后使用列解碼器和多路復用器進行讀取。
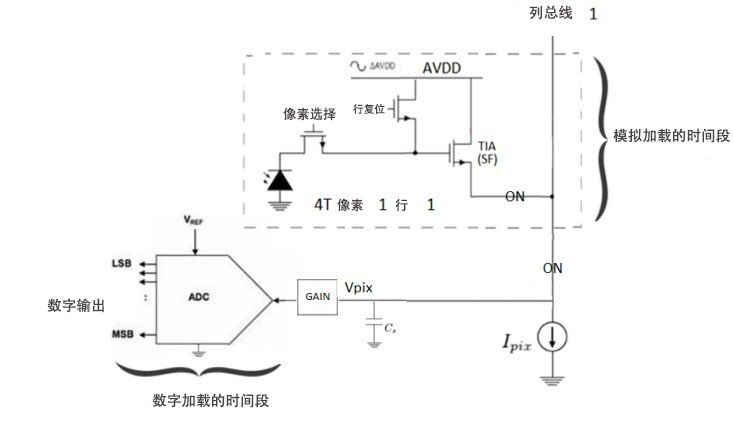
圖4. 選定行和列的示例
幀和行轉換
幀率衡量的是捕獲一個完整的圖像并讀出陣列以進行處理的速度,典型的頻率范圍是30-120赫茲 (Hz)。圖像傳感器可以是用于慢動作回放的高幀率器件(>60幀),或用于運動模糊效果的低幀率器件(<60 fps)。
速率也可能受到快門速度的限制或影響,快門速度控制著圖像傳感器收集光線的時間,或在最后一行被用于水平消隱、同步時間或其他目的后發生的被稱為"暗期 "的可編程時間間隔。
我們可以計算出一個給定幀率(15、30或60)所需的最高PSRR的頻率。--例如,400萬像素相機—和設計一個具有所需PSRR的LDO,用于計算頻率。

圖 5. 不同幀速率與水平頻率的影響
幀速率約為讀出速率的 75%,另外 25% 作為其他處理的空閑時間,如改變光圈、曝光時間計算、鏡頭自動對焦(AF)、圖像處理、內存寫入速度等。對于靜態圖像和視頻,幀讀出以行序列方式進行,最后,整個幀被收集在緩沖區中并呈現出完整的圖像。
圖像傳感器電源軌
CMOS圖像傳感器通常需要三個不同的電源軌來為模擬軌(AVDD)、接口(DOVDD)和數字軌(DVDD)供電。用于模擬電源軌的標準電壓是2.8 V,接口電源軌是2.8 V或1.8 V,而數字電源軌是1.8 V或1.2 V。
為了改善CMOS圖像傳感器的噪聲性能,我們可以在電源引腳前放置一個大的旁路電容。
減少每個電源軌的波動還可改善CMOS圖像傳感器的噪聲性能。一般來說,模擬電源軌
是對噪聲最敏感的軌道,其次是數字軌,對噪聲也很敏感。
電源抑制比(PSRR)
PSRR提供了一個方法來衡量LDO抑制紋波的能力,或如何阻斷僅在LDO輸入端由電源軌產生的噪聲。PSRR越高,可阻斷越多的電源噪聲或波紋。這些紋波可能來自50/60 Hz紋波的輸入電源,DC-DC的開關頻率,或由于不同電路共享輸入電源而產生的紋波。
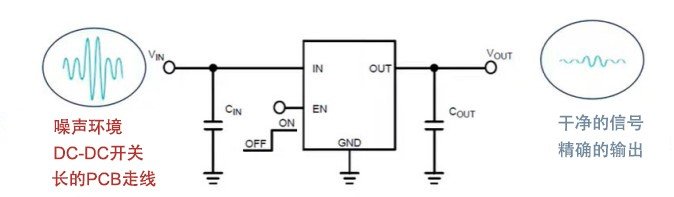
圖6. 從LDO的輸入到輸出的噪聲示例
LDO的反饋回路通常控制著頻率在100 kHz以下的系統的PSRR。所以要確保選擇一個合適的LDO。對于高于100 kHz的頻率,適當選擇無源元件和PCB布局/位置來控制PSRR。
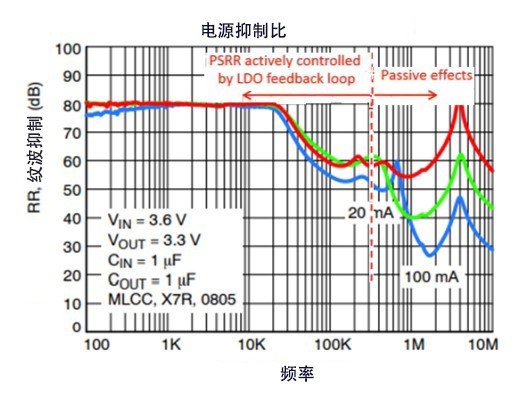
圖7. 典型LDO的 PSRR行為與頻率的關系
在設計PCB時,應注意電流環路要緊密,以減少寄生電感和電源軌與相機軌之間的紋波。在Vin和Vo之間使用一個干凈的偏置或更高的余量,也可以增加PSRR 性能能力。
低的PSRR性能或模擬軌上的任何噪聲會導致電源軌上的噪聲通過高增益源跟隨器放大器電路進入輸出信號路徑,導致捕獲的圖像中出現不想要的水平波紋。
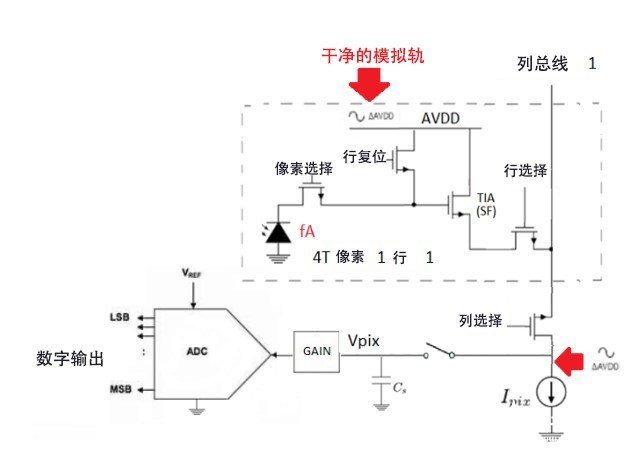
圖8. 模擬軌上的噪聲示例
普通 LDO 在高頻下的 PSRR 較低,這對于普通相機來說應該足夠了,但是對于 50-200 MP 范圍內的高分辨率和高幀率圖像傳感器,肯定需要特定系列的 LDO, 在較低頻率范圍(達 10 kHz)下的PSRR大于 90 dB,在 1-3 MHz 頻率范圍內的PSRR大于 45 dB,以減少幀和行速率轉換期間的紋波。
傳感器幀和行速率與電源負荷的關系
值得注意的是,幀率(30-120 fps)和行速率(22-44 kHz)都會給圖像傳感器帶來動態負荷,在2.8 V的模擬軌上產生下沖和過沖。
在每一個新的幀或新的行轉換過程中,電流的吸取就像一個階梯負載。例如,在一幀或一行的讀取過程中,或者在每一幀或一行的讀取之間,電源方案 (LDO)需要在每個幀和行轉換期間處理幾百毫安的負載變化,但在其輸出電壓軌上無任何大幅度的波動。
對于相機去耦,需要體電容器在行和幀頻率附近具有最低阻抗,以獲得最佳系統性能。
LDO輸出噪聲(μ VRMS)
根據圖像傳感器的設計,每個像素都有一個電荷飽和度或滿井容量--一個像素在飽和前所能容納的電荷量(以電子為單位)。對于任何圖像傳感器,動態范圍(dB)定義為圖像中可被同時捕獲的最亮和最暗的部分。
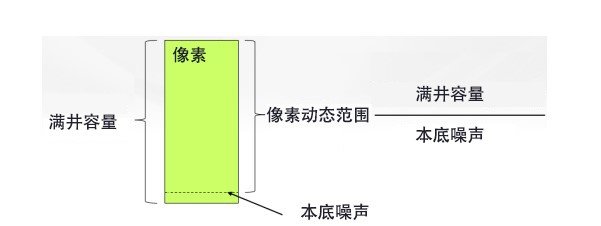
圖9. 像素容量和本底噪聲示例
在任何LDO的輸出端,10 Hz至1 MHz之間的頻譜噪聲密度越低,就越能發揮重要作用,轉移到CMOS圖像傳感器中的噪聲就越少,從而使給定像素的動態范圍更高。
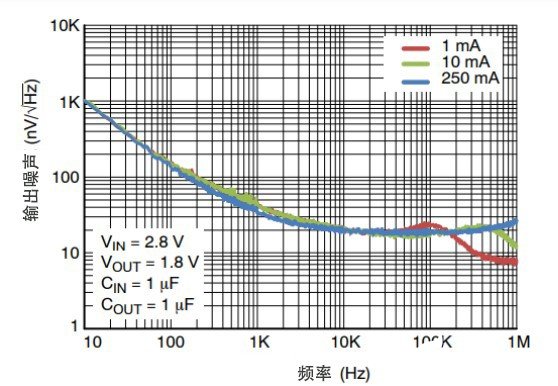
圖10. 典型的LDO輸出噪聲密度
找到CMOS圖像傳感器的信噪比(SNR)信息并設計系統是至關重要的,以使整體紋波和噪聲至少比傳感器的噪聲閾值低40 dB。
總結
在為不同規格的圖像傳感器設計LDO電源方案時,有不同的問題要解決,比如400萬像素不同于4000萬像素,30幀不同于120幀的幀率,或高動態范圍不同于低動態范圍,等等。我們通過互聯網服務提供商(ISP)提供的最大數據速率能力和所用的C/D-PHY MIPI通道數量實現高分辨率相機的最大允許幀率。考慮到計算出的最高幀率頻率所需的最高PSRR,和一個給定的圖像傳感器所需的RMS噪聲密度與已知的SNR,可以幫助我們設計一個優化的電源系統,以滿足當今高分辨率和高幀率CMOS圖像傳感器的要求。
使用在較高頻率下具有高PSRR、低RMS噪聲的LDO方案,以及在給定的垂直和水平頻率下具有特定阻抗的合適的無源器件,可以幫助改善CMOS圖像傳感器的整體噪聲性能,減少電源波紋,從而使拍攝的圖像減少不想要的水平波紋。
責任編輯:彭菁
-
二極管
+關注
關注
147文章
9570瀏覽量
165883 -
探測器
+關注
關注
14文章
2617瀏覽量
72908 -
CMOS圖像傳感器
+關注
關注
10文章
215瀏覽量
27650
發布評論請先 登錄
相關推薦
增強高分辨率圖像捕獲的選擇
AMIS CMOS可選分辨率圖像傳感器722402
KAI-43140 CCD圖像傳感器提供高分辨率及圖像均勻性
康耐視兩款高分辨率Checker視覺傳感器
可滿足高分辨率圖像不斷增長需求的區域傳感器
47.5Mp高分辨率、高速全局快門CMOS成像傳感器介紹
佳能發布了針對工業和監控市場的超高分辨率圖像傳感器

思特威重磅推出兩顆高分辨率高速工業CMOS圖像傳感器





 工商網監
工商網監
評論