 CW32L083智能溫濕度監控系統
CW32L083智能溫濕度監控系統
【系統功能】
CW32l083為主控制的無線終端數據收發。運行國產RT-Thread操作系統。主要功能為實現用E31-TTL-50接收各個模塊發送上來的數據,解析數據,分析數據,顯示數據,并實現信息的顯示,以及異常情況的顯示、警告功能。
無線終端主要以cw32L031為主控,采集sht30溫濕度傳感器數據,通過E31-TTL-50無線模塊將數據上傳。實現5微安的待機電流的超低功耗。
【功能模塊】
主機:
1、接收模塊:接收無線終端模塊發送的溫濕度數據,解析數據后,更新模塊數據。
2、巡檢模塊:定時巡檢各個無線終端的數據,判定工作狀況、更新顯示、報警標志。
3、顯示模塊:根據各個模塊的工作狀態,生成為示數據,用TFT屏展示。
4、報警模塊:驅動pwm模塊,裝載pwm重載值,發出警示聲音。
無線終端:
1、溫濕采集模塊:采集sht30數據。
2、發送模塊:將數據打包,通過無線發送。
3、休眠模塊:發送完數據后進入深度休眠狀態,由AWT模塊定時喚醒。
【硬件】
主機:
1、CW32L083VxTx StartKit REV01開發板。
2、ST7735TFT顯示屏。
3、E31-TTL-50無線串口模塊。
無線終端:
1、cw32l031開發板
2、Sht30溫濕度傳感器。
3、E31-TTL-50無線串口模塊。
4、可充電鋰電池。
【開發環境】
1、代碼編譯環境采集ubuntu20.4;
2、代碼編輯工具為vscode 1.79.2;
3、交叉編譯器為arm-nano-eabi-gcc;
4、固件庫為cw32提供的固件庫;
5、gcc啟動文件與鏈接由作者在cortex-M0+的其他軟件上移植過來;
6、下載器為CW32配送的wch-link;
7、代碼下載軟件為pyocd;
8、調式工具為gdb。
本次開發板的編譯環境、工具均采用開源工具。
【操作系統】
本工程的主控,作者移植了RTT-Thread Nano 3.15版本。RTT作為一款國產開源免費的操作系統可以提供強大的功能,為CW32的性能發揮提供強力的支持。
【程序流程圖】
1、主機端由RTT開啟兩個主要任務,用于數據顯示與巡檢,同時利用串口中斷來實時處理接收的數據。GTIM定時開啟PWM任務,來驅動開發板板載的BEEP。流程圖如下:
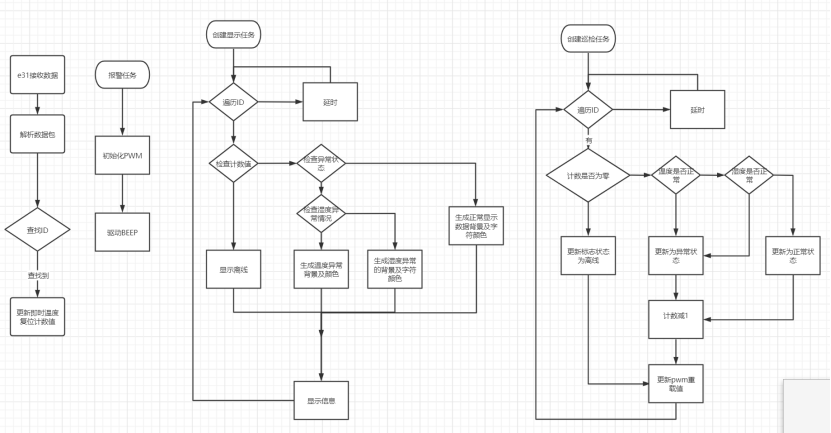
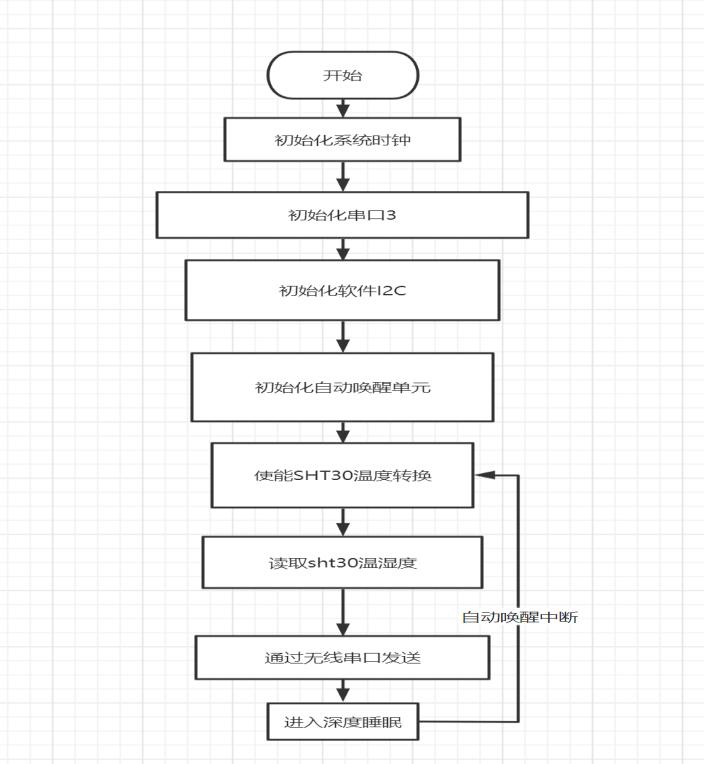
2、無線終端采用單線流程,主要是采集數據后進入休眠,做到極簡才能實現最好的功耗控制。流程圖如下:
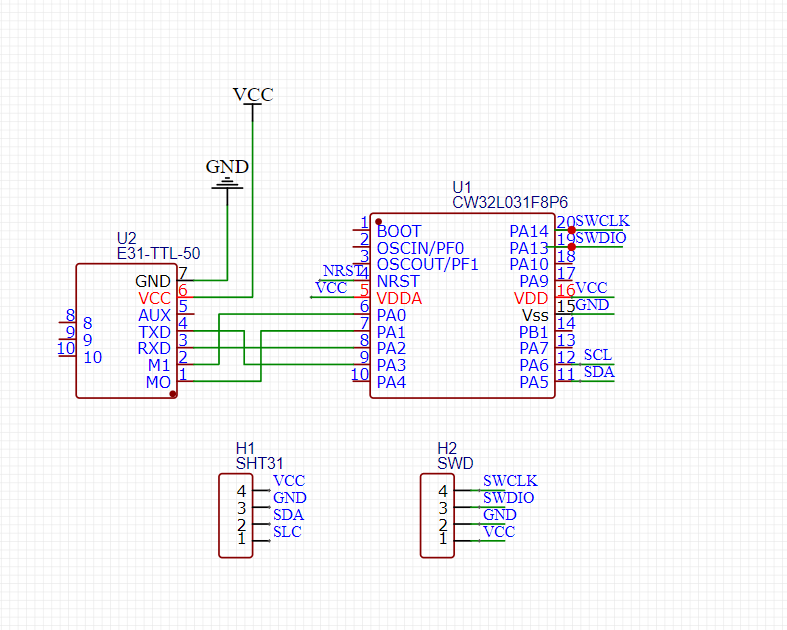
【原理圖】
1、無線端終采集:
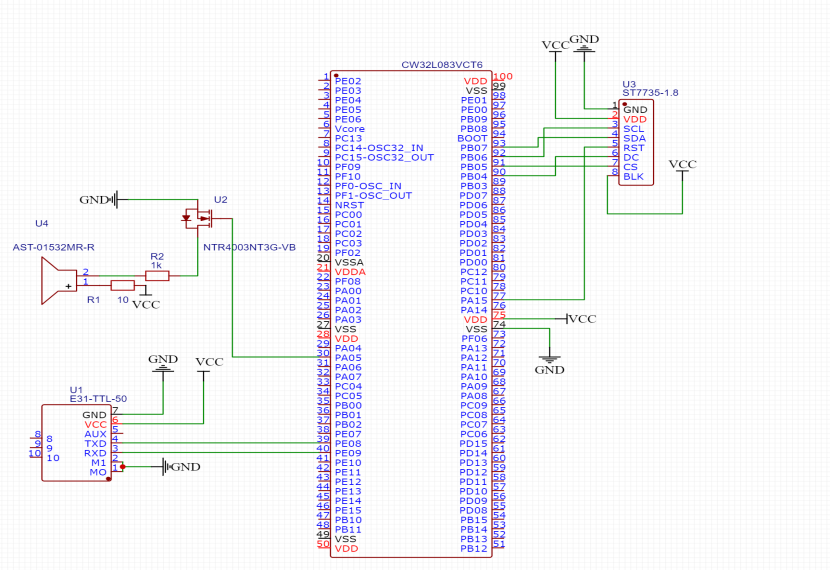
2、主機端:
【程序設計】
一、無線采集端
二、主機端
1.主機端我們處理數據的核心為sht30數據,聲明結構體如下:
typedef struct _sht30_data
{
uint32_t ID;
int temp; //溫度值
int temp_upper_limit; //溫度值上限
int temp_lower_limit; //溫度值下限
uint16_t humi; //濕度
uint16_t humi_upper_limit; //濕度上限
uint16_t humi_lower_limit; //濕度上限
uint32_t time_tick; //更新數據計時
enum _sht30_errcode sht_errcode;
} SHT30_infor;
主要用于存儲數據的核心,以后所有的任務都是針對這個模塊進行。
2.同時聲明一個枚舉,來確定測量點的狀態:
enum _sht30_errcode{
NORMAL=0,
ABNORMAL,
OFFLINE,
};
3.先約定好默的一些參數,最大傳感器個數,溫濕度報警上下限,巡檢次數初值:
#define maxID 2
#define MaxTime 300
#define HUMI_LOWER 500
#define HUMI_UPPER 750
#define TMPE_LOWER 100
#define TMPE_UPPER 300
到此我們的數據結構設計完成。
4.時鐘的初始化,由于主機端需要高速處理數據這里配置為64MHz:
void RCC_cofiguration(void)
{
RCC_HSI_Enable(RCC_HSIOSC_DIV6);
// 使能PLL,通過HSI倍頻到 64MHz
RCC_PLL_Enable(RCC_PLLSOURCE_HSI, 8000000, 8); //HSI 默輸出8MHz
///< 當使用的時鐘源HCLK大于24M,小于等于48MHz:設置FLASH 讀等待周期為2 cycle
///< 當使用的時鐘源HCLK大于48M,小于等于72MHz:設置FLASH 讀等待周期為3 cycle
__RCC_FLASH_CLK_ENABLE();
FLASH_SetLatency(FLASH_Latency_3);
//時鐘切換到PLL
RCC_SysClk_Switch(RCC_SYSCLKSRC_PLL);
RCC_SystemCoreClockUpdate(64000000);
}
5.主機端的無線接收使用了uart1,端口選擇了PE8與PE9作為TXD、RXD,初始化代碼為:
void E31_UART_Init(void)
{
uint32_t PCLK_Freq;
GPIO_InitTypeDef GPIO_InitStructure = {0};
UART_InitTypeDef UART_InitStructure = {0};
PCLK_Freq = SystemCoreClock > > pow2_table[CW_SYSCTRL- >CR0_f.HCLKPRS];
PCLK_Freq > >= pow2_table[CW_SYSCTRL- >CR0_f.PCLKPRS];
// 調試串口使用UART3
// PA8- >TX
// PA9< -RX
// 時鐘使能
RCC_AHBPeriphClk_Enable(E31_UART_GPIO_CLK, ENABLE);
E31_UART_APBClkENx(E31_UART_CLK, ENABLE);
// 先設置UART TX RX 復用,后設置GPIO的屬性,避免口線上出現毛刺
E31_UART_AFTX;
E31_UART_AFRX;
GPIO_InitStructure.Pins = E31_UART_TX_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_Init(E31_UART_TX_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pins = E31_UART_RX_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT_PULLUP;
GPIO_Init(E31_UART_RX_GPIO_PORT, &GPIO_InitStructure);
UART_InitStructure.UART_BaudRate = E31_UART_BaudRate;
UART_InitStructure.UART_Over = UART_Over_16;
UART_InitStructure.UART_Source = UART_Source_PCLK;
UART_InitStructure.UART_UclkFreq = PCLK_Freq;
UART_InitStructure.UART_StartBit = UART_StartBit_FE;
UART_InitStructure.UART_StopBits = UART_StopBits_1;
UART_InitStructure.UART_Parity = UART_Parity_No ;
UART_InitStructure.UART_HardwareFlowControl = UART_HardwareFlowControl_None;
UART_InitStructure.UART_Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(E31_UARTx, &UART_InitStructure);
//優先級,無優先級分組
NVIC_SetPriority(E31_UART_IRQ, 0);
//UARTx中斷使能
NVIC_EnableIRQ(E31_UART_IRQ);
}
同時配置中斷函數,主要功能是判斷是否接到了幀屬,如果接收到幀尾則把數據交給回調函數進行處理,代碼如下:
void UART1_UART4_IRQHandler(void)
{
/* USER CODE BEGIN */
uint8_t TxRxBuffer;
if(UART_GetITStatus(CW_UART1, UART_IT_RC) != RESET)
{
TxRxBuffer = UART_ReceiveData_8bit(CW_UART1);
if(e31_rx_cnt < E31_RX_MAXLEN)
{
if ((TxRxBuffer == 0x0A) && (e31_rx_state == 1))
{
e31_rx_state = 2;
e31_exp_data();
}
else if ((TxRxBuffer == 0x0D) && (e31_rx_state == 0))
{
e31_rx_state = 1;
}
else if (e31_rx_state == 0)
{
e31_rx_buff[e31_rx_cnt] = TxRxBuffer;
e31_rx_cnt ++;
}
}
else
{
e31_rx_cnt = 0;
e31_rx_state = 0;
}
UART_ClearITPendingBit(CW_UART1, UART_IT_RC);
}
/* USER CODE END */
}
同時回調函數,為處理與解析數據更新到sht30數據之中:
void e31_exp_data(void)
{
int temp;
uint16_t humi;
uint32_t ID;
if(e31_rx_state == 2)
{
if(e31_rx_cnt == 14)
{
temp = e31_rx_buff[10]<
humi = e31_rx_buff[12]<
ID = e31_rx_buff[6]<
updata_sht30(temp, humi, ID);
rt_kprintf("ID:%X, temp:%d, humi:%d\\r\\n", ID, temp, humi);
}
}
e31_rx_cnt = 0;
e31_rx_state = 0;
}
6.ST7735的驅動,驅動采集模擬SPI進行驅動,詳細的驅動見工程源碼包。
7.PWM驅動,pwm選用PA6為pwm輸出端,初始化為1KHz的輸出來驅動板載的蜂鳴器。在初始化驅動后,我們裝載最大的裝截時,占空比為100%,使得蜂鳴器停止,在后面的需要輸入報警聲后,調整為50%的占空比,來實現蜂鳴器的報警聲:
void init_beep(void)
{
GTIM_InitTypeDef GTIM_InitStruct = {0};
__RCC_GTIM1_CLK_ENABLE(); // GTIM2時鐘使能
/* PA6 PWM 輸出 */
__RCC_GPIOA_CLK_ENABLE();
PA06_AFx_GTIM1CH1();
PA06_DIR_OUTPUT();
PA06_DIGTAL_ENABLE();
GTIM_InitStruct.Mode = GTIM_MODE_TIME;
GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE;
GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV2;
// GTIM_InitStruct.ReloadValue = 60100UL - 1; // PWM頻率為 48M/60100=800Hz, SPWM周期 = 800/2/1000= 0.4Hz
GTIM_InitStruct.ReloadValue = 32000UL - 1; // PWM頻率為 64M/2/64000=1000Hz, SPWM周期 = 800/2/1000= 0.4Hz
GTIM_InitStruct.ToggleOutState = DISABLE;
GTIM_TimeBaseInit(CW_GTIM1, >IM_InitStruct);
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL1, GTIM_OC_OUTPUT_PWM_HIGH);
GTIM_SetCompare1(CW_GTIM1, 32000-1);
GTIM_Cmd(CW_GTIM1, ENABLE);
}
void alarm_ON(void)
{
GTIM_SetCompare1(CW_GTIM1, 16000-1);;
}
void alarm_OFF(void)
{
GTIM_SetCompare1(CW_GTIM1, 32000-1);
}
8.按照程序流程圖,我們創建了兩個任務,一個為巡檢任務來實現對傳感器模塊的數據監控,并實理更新工作狀態,代碼如下:
/* 巡檢任務 */
void thread_sht30_check_entry(void *parameter)
{
int i;
uint8_t alarm_sta;
while(1)
{ alarm_sta = 0;
for(i=0; i< maxID; i++)
{
if(sht30[i].time_tick == 0)
{
//發送離線的警告
sht30[i].sht_errcode = OFFLINE;
sht30[i].temp = 0;
sht30[i].humi = 0;
alarm_sta ++;
}
else if (sht30[i].temp < sht30[i].temp_lower_limit \\
|| sht30[i].temp > sht30[i].temp_upper_limit \\
|| sht30[i].humi < sht30[i].humi_lower_limit \\
|| sht30[i].humi > sht30[i].humi_upper_limit )
{
sht30[i].sht_errcode = ABNORMAL;
sht30[i].time_tick--;
alarm_sta++;
}
else
{
sht30[i].sht_errcode = NORMAL;
sht30[i].time_tick--;
}
}
if(alarm_sta > 0)
{
alarm_ON();
}
else
{
alarm_OFF();
}
rt_thread_mdelay(500);
}
}
/* 巡檢任務 */
void sht30_check(void)
{
rt_thread_init(&tid_check_sht30,
"sht30_check",
thread_sht30_check_entry,
RT_NULL,
&thread_sht30_check_stack[0],
sizeof(thread_sht30_check_stack),
THREAD_PRIORITY - 1, THREAD_TIMESLICE);
rt_thread_startup(&tid_check_sht30);
}
9.顯示任務,為定時按照傳感器的工作狀態來實現數據的展示,主要是根據三個狀態、以及溫濕度是否超過或者低于限值來顯示不同的顏色,代碼如下:
/* 線程 顯示 的入口函數 */
static void thread_lcd_entry(void *parameter)
{
sht30_data_Init();
char buff_temp[15];
char buff_humi[15];
uint16_t temp_background_color, temp_font_color;
uint16_t humi_background_color, humi_font_color;
int y_offset = 0;
int i = 0;
while (1)
{
y_offset = 46;
for(i=0;i< maxID;i++)
{
rt_kprintf("sensorID:%d stata: %d", i+1, sht30[i].sht_errcode);
y_offset = y_offset + i*70;
sprintf(buff_temp,"%d%d.%d",sht30[i].temp/100, sht30[i].temp/10%10, sht30[i].temp%10);
sprintf(buff_humi,"%d%d.%d",sht30[i].humi/100, sht30[i].humi/10%10, sht30[i].humi%10);
switch (sht30[i].sht_errcode)
{
case NORMAL:
temp_background_color = GRAY0;
temp_font_color = BLUE;
humi_background_color = GRAY0;
humi_font_color = BLUE;
break;
case OFFLINE:
temp_background_color = GRAY2;
temp_font_color = BLUE;
humi_background_color = GRAY2;
humi_font_color = BLUE;
sprintf(buff_temp, " ");
sprintf(buff_humi, " ");
break;
case ABNORMAL:
if(sht30[i].humi< sht30[i].humi_lower_limit || sht30[i].humi > sht30[i].humi_upper_limit)
{
humi_background_color = YELLOW;
humi_font_color = BLACK;
}
else
{
humi_background_color = GRAY0;
humi_font_color = BLUE;
}
if(sht30[i].temp< sht30[i].temp_lower_limit || sht30[i].temp > sht30[i].temp_upper_limit)
{
temp_background_color = YELLOW;
temp_font_color = BLACK;
}
else
{
temp_background_color = GRAY0;
temp_font_color = BLUE;
}
break;
default:
break;
}
Gui_DrawFont_GBK16(90,y_offset,temp_font_color,temp_background_color,buff_temp); //更新顯示
Gui_DrawFont_GBK16(90,y_offset+20,humi_font_color,humi_background_color,buff_humi);
}
rt_thread_mdelay(10000);
}