 基于SEPIC變換器的無刷直流電機轉矩脈動抑制方法
基于SEPIC變換器的無刷直流電機轉矩脈動抑制方法
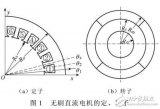
無刷直流電機(BLDCM)具有良好的調速和控制性能,同時又具有功率密度高、功率因數高、結構簡單、可靠性高等一列優點,非常適合在農業電動車輛上作為驅動電機使用。但是,無刷直流電機在車輛驅動系統中應用時存在換相轉矩脈動較大、無位置傳感器控制、制動能量回饋制動困難等一些問題,這也是無刷直流電機沒有在電動車輛驅動系統中得以廣泛應用的主要原因。為提高無刷直流電動機的性能,研究提出了一種使用單端初級電感變換器(SEPIC)調節無傳感器無刷直流(BLDC)電機的組合方法,以改善無刷直流電機速度環和轉矩環的控制策略。其中,研究以減小無刷直流電機轉矩脈動為目的,基于金鷹優化(GEO)算法和徑向基函數神經網絡(RBFNN)算法結合,實現了對無數直流電機轉速和轉矩的控制。研究所提出的改進的無橋單端初級電感變換器,可用于調節比例積分微分(PID)控制器的參數,從而提高無刷直流電機轉矩控制中轉速閉環(PID)控制器的性能,為無刷直流電機的控制提供了新思路。
02 研究內容
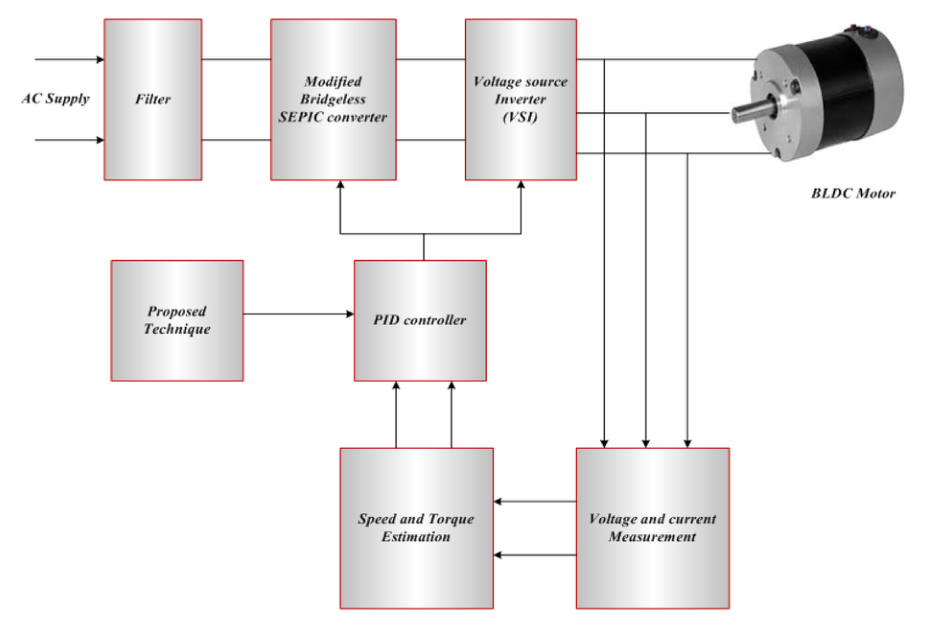
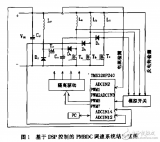
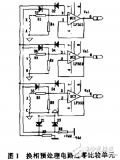
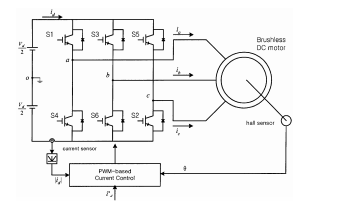
為了控制無刷直流電動機的轉矩和轉速以減小轉矩脈動,研究提出了基于GEO-RBFNN的PID控制器。所提出的無刷直流電機無傳感器控制結構如圖所示。研究中,PID控制器作為建議的控制器來整定控制參數。該PID控制器產生PWM信號進行控制參數的最優整定,為改進的無橋SEPIC變換器提供PWM信號,實現無傳感器無刷直流電動機的最優速度控制和轉矩脈動抑制。
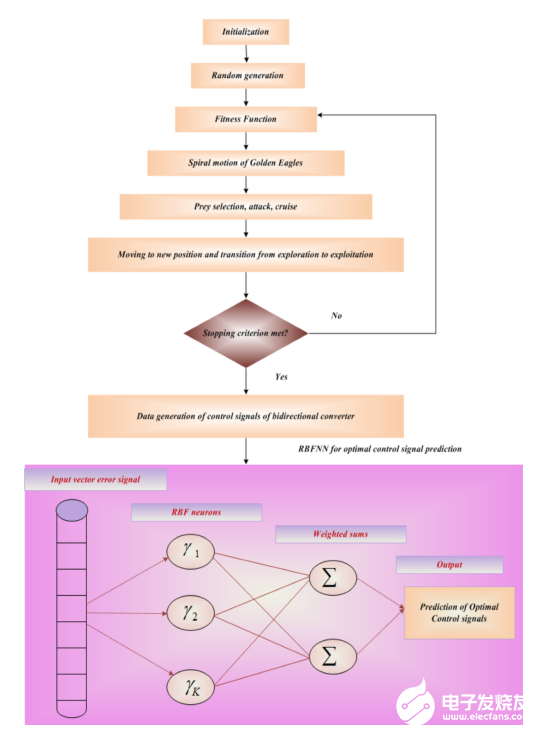
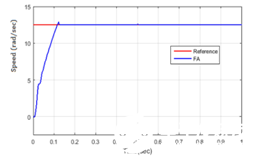
如圖所示,研究采用GEO - RBFNN算法實現了轉速、轉矩控制和轉矩脈動最小化,通過在MATLAB/Simulink平臺上建立了GEO-RBFNN模型,結果表明,采用該方法計算的定子電流、功率因數和轉矩脈動分別為1.26%、0.9951和7.4,與現有的FA和PSO方法相比,該方法的有效性提高了計算效率。
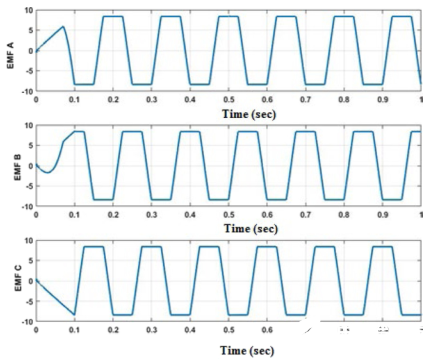
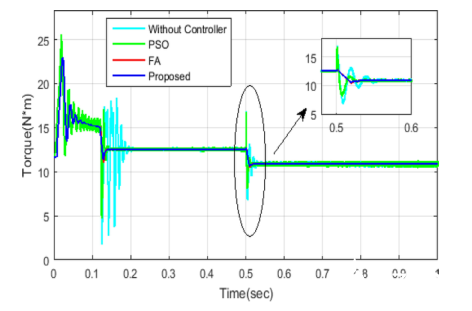
如圖所示,研究在沒有控制器的情況下,分析了基于轉子轉速、轉矩變化、定子電流、定子電動勢的對轉矩脈動抑制的效果以及轉矩脈動抑制的實現方法。

研究采用的GEO-RBFNN方法以較少的迭代次數提供可靠的結果,GEO-RBFNN支持簡單的計算,并提供了較低的難度,但研究所建立的控制算法對于高轉速的大功率系統,其控制模型的性能有限,與此同時,該研究未實現控制器參數的自適應整定,因此無法保證系統在復雜工作階段下的穩定性。
03 研究結論
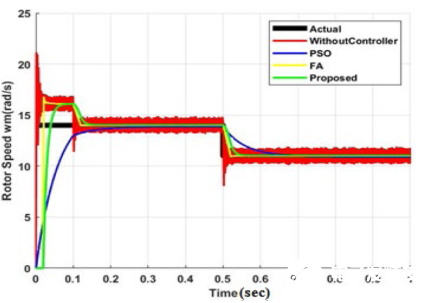
研究提出了一種控制無刷直流電動機轉速和轉矩脈動的新方法。在MATLAB/Simulink平臺上建立GEO-RBFNN模型;并與現有的FA和PSO方法進行了性能比較。該系統比現有方法具有更好的效果,在實現轉矩脈動抑制上(現有方法)抑制效率為75%。FA、PSO和研究所提出方法的效率分別為82.136%、77.26588%和97.99038%。研究所提出的方法有效性提高了計算效率,與此同時,研究通過改進無橋單端初級電感變換器,可實現對比例積分微分(PID)控制器的參數的調節,從而提高無刷直流電機轉矩控制中轉速閉環(PID)控制器的性能,為無刷直流電機的控制提供了新思路。
責任編輯:彭菁
-
控制器
+關注
關注
112文章
16203瀏覽量
177407 -
無刷直流電機
+關注
關注
60文章
686瀏覽量
46010
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論