 兩種MOS冗余驅動方案
兩種MOS冗余驅動方案
作者:Jimmy Zhou
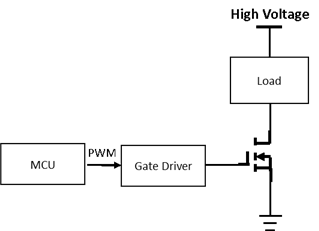
在電源和電機驅動應用中,功率MOS可以在不同的調制方式下,實現相應的能量轉換功能。單個MOS驅動的結構如圖1所示,通過MCU的 PWM模塊調整占空比,控制功率MOS的通斷,達到相應的功能。另外,在一些過壓,過流和過載工況下,功率MOS很容易損壞,從而造成整個驅動板的失效,甚至存在起火的風險。本文提出兩個冗余驅動線路,可以有效避免MOS單點失效的負面影響。
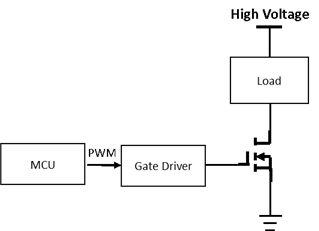
圖1:典型的有刷電動工具驅動系統
如圖2所示,通過冗余的驅動和功率MOS,可以實現驅動的冗余,有效地隔離MOS失效的故障。在本設計中,驅動線路是完全隔離的,即驅動的原邊和副邊是隔離,驅動通道1和通道2是隔離。即使MOS失效,比如任意MOS短路,系統的高壓并不能傳導到低壓,從而實現故障隔離。
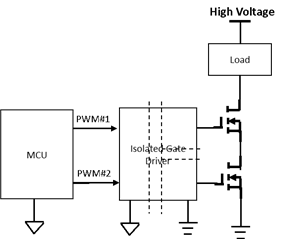
圖2:雙管冗余驅動方案
雙管冗余驅動方案的設計要點如下:
?可以采用兩個單通道的隔離驅動IC,如果采用隔離半橋驅動芯片,芯片需要支持overlap模式。
?輸入通道的供電通過電阻和二極管連接到驅動供電軌。當下管導通時,驅動電壓軌通過自舉二極管為自舉電容充電,自舉電容上的電壓可以為上橋臂驅動模塊供電。
?自舉二極管擊穿電壓大于母線電壓。
?隔離IC的隔離工作電壓大于母線電壓。
?PWM輸入信號,經過RC濾波網絡,避免輸入干擾信號。
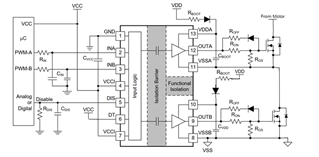
圖3:典型的有刷電動工具驅動系統
UCC21225A 是隔離的雙通道驅動芯片,原邊供電電壓3V-18V,副邊供電電壓6.5V ?C 25V,驅動延遲時間18ns,CMTI為100V/ns,驅動能力4A/6A,隔離等級為2500Vrms(在UL1577標準下)。UCC21225A根據外圍線路,支持兩通道的低邊驅動,兩通道的高邊驅動和半橋驅動。在本文中,通過配置DT引腳,UCC21225工作在overlap模式。
表1:UCC21225A的參數表
| Device | Output current | Isolation rating | Input VCC | Output VDD | CMTI | Package |
| UCC21225A | 4A/6A | 2500Vrms | 3V-18V | 6.5V?C25V | 100V/ns | VLGA(5mm×5mm) |
同時,UCC21225A具備隔離驅動的特性,輸入和輸出是隔離的,兩個驅動通道之間也是隔離的。TI技術說明文檔“Understanding failure modes in isolators”,詳細給出了隔離器件的失效模式。由該文檔可知,在失效模式2下,輸入模塊、隔離驅動模塊1和隔離驅動模塊2中的任一一個模塊發生故障(短路或者開路),不會擊穿絕緣基,即故障不會傳導到其他模塊。根據以上分析,MOS的不同形式的單點失效,對系統的影響如表格2所示。
表2:MOS不同失效下系統的影響
| MOS失效模式 | 影響 |
| 任意MOS的DS短路 | 系統功能正常;高壓不會傳導到驅動,IC功能正常。 |
| 任意MOS的GD短路 | 系統功能正常,高壓會損壞UCC21225A的MOS對應的驅動模塊,但是UCC21225A的其他部分工作正常;由于自舉二極管的存在,功率回路的高壓不會傳導到驅動供電軌,對系統其他部分無影響。 |
| 任意MOS的GS短路 | 系統功能正常;如果失效發生在上橋臂MOS,高壓會損壞UCC21225A的失效MOS對應的驅動模塊,UCC21225A的其他部分工作正常,由于自舉二極管的作用,功率回路的高壓不會傳導到驅動供電軌,對系統其他部分無影響;如果失效發生在下橋臂MOS,UCC21225不會損壞。 |
| 任意MOS的GDS短路 | 系統功能正常,高壓會損壞UCC21225A的MOS對應的模塊,但是UCC21225A的其他部分工作正常;由于自舉二極管的存在,功率回路的高壓不會傳導到驅動供電軌,對系統其他部分無影響。 |
| 任一MOS的GS開路 | 功率回路安全斷開,功能性失效;高壓不會損壞驅動,IC功能正常。 |
| 任一MOS的DS開路 | 功率回路安全斷開,功能性失效;高壓不會損壞驅動,IC功能正常。 |
通過以上分析得知,在單個MOS的DS、GD、GS、GDS短路等失效條件下,可以保證系統功能正常,阻斷故障點的擴大。但是在單個MOS的GS和DS開路失效條件下,功率回路斷開,系統可靠關斷。同時,如果雙管冗余驅動方案中的隔離半橋驅動,采用支持overlap的非隔離半橋驅動,對于單個MOS的DS短路故障,可以做到良好的隔離,對于MOS的GD、GS和GDS短路失效,會造成驅動IC損壞,系統功能損壞。
雙管冗余驅動方案在MOS的GS和DS開路失效下,系統的功能異常,在雙管冗余驅動方案上進一步改進,將MOS和驅動線路加倍,雙路MOS并聯在一起,可以保證在MOS的GS和DS開路失效條件下,系統功能正常。
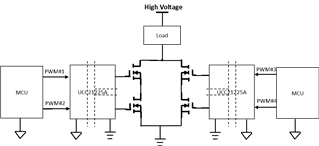
圖4:四管冗余驅動線路
最后,雖然本文給出的示例都是低側MOS驅動,在提供隔離驅動電壓軌下,該方案也可以拓展到高側MOS驅動。雙管冗余和四管冗余驅動線路的優缺點如下:
表3:雙管冗余和四管冗余驅動方案的優缺點分析
| MOS失效模式 | 優點 | 缺點 |
| 雙管冗余驅動方案 |
1.在單個MOS的DS、GD、GS、GDS短路等失效下,隔離故障點,系統功能正常; 2.在單個MOS的DS、GS開路等失效下,隔離故障點,系統可靠關斷。 |
1.考慮到上橋臂的驅動供電,對最小同占空比和上電時序由具體要求,控制邏輯復雜。 2.由于MOS的本身特性不對稱,驅動IC的兩個通道的信號傳輸延遲差異,MOS開通/關端特性不一致,造成可能性的震蕩,PWM頻率上限會減低,開關損耗也會增加; 3對于雙管冗余方案,由于MOS數量加倍,導通損耗加倍; 4.沒有故障診斷,無法定位故障點; 5.成本上升; |
| 四管冗余驅動方案 | 1.在單個MOS的DS、GD、GS、GDS短路,以及單個MOS的DS、GS開路失效下,隔離故障,系統功能正常。 |
本文給出兩種MOS的冗余驅動線路,可以有效避免MOS單點故障造成的影響,在MOS的DS、GD、GS、GDS短路等條件下,雙管冗余驅動可以保證系統功能正常,阻斷故障點的擴大。同時四管冗余驅動,可以保證系統在MOS的任意單點故障下,隔離故障,系統功能正常。
-
mcu
+關注
關注
146文章
16667瀏覽量
347828 -
PWM
+關注
關注
114文章
5059瀏覽量
212217 -
MOS
+關注
關注
31文章
1199瀏覽量
92909 -
冗余驅動
+關注
關注
0文章
3瀏覽量
1463
發布評論請先 登錄
相關推薦
電源和電機驅動應用中兩種MOS冗余驅動方案分析
兩種LED驅動模式的功能及使用方法


在白光LED驅動中兩種拓撲應用電路方案的介紹
發光二極管LED的兩種驅動方案解析
MOS管靜電擊穿有兩種方式資料下載

兩種MOS冗余驅動方案





 工商網監
工商網監
評論