") 基于MCU的室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng)
基于MCU的室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng)
對于在室外環(huán)境工作的移動機(jī)器人通常使用慣導(dǎo)/衛(wèi)星組合導(dǎo)航方式。慣性導(dǎo)航系統(tǒng)[1]具有完全自主、抗干擾強(qiáng)、隱蔽能力好和輸出參數(shù)全面等優(yōu)點(diǎn),但它的魯棒性極低,誤差會不斷隨時(shí)間累積發(fā)散。衛(wèi)星導(dǎo)航系統(tǒng)具有精度高、定位范圍廣和誤差不隨時(shí)間累積等優(yōu)點(diǎn),但其自主性差、易受外界遮擋和干擾、接收機(jī)數(shù)據(jù)更新頻率低等缺點(diǎn)。因此工程上常常將兩者互補(bǔ)結(jié)合使用,組成衛(wèi)星/慣性組合導(dǎo)航系統(tǒng)。
本文以低功耗MSP430F149為核心,設(shè)計(jì)了能夠同時(shí)實(shí)現(xiàn)衛(wèi)星導(dǎo)航(GNSS)接收機(jī)、慣性測量單元(IMU)、氣壓高度等導(dǎo)航信息的高速采集與高速合路傳輸,并進(jìn)行初步導(dǎo)航定位信息融合的導(dǎo)航系統(tǒng),即可為室外移動機(jī)器人提供直接的導(dǎo)航服務(wù),也可作為高精度組合導(dǎo)航系統(tǒng)的原始測量信息高速采集系統(tǒng)。
系統(tǒng)設(shè)計(jì)的關(guān)鍵是利用單片機(jī)有限的接口資源實(shí)現(xiàn)了多傳感器信息并行采集,設(shè)計(jì)了有效的數(shù)據(jù)同步方法,解決了氣壓傳感器數(shù)據(jù)手冊疏漏導(dǎo)致的無法接入問題,給出了機(jī)器人組合定位的基本方法。系統(tǒng)充分利用了MSP430F149單片機(jī)的能力,具有結(jié)構(gòu)簡單、低功耗、對傳感器具有普適性等優(yōu)點(diǎn)。
1 總體設(shè)計(jì)
本系統(tǒng)由電源、氣壓計(jì)接口、IMU接口、GNSS接收機(jī)接口、SPI轉(zhuǎn)UART模塊及MSP430F149構(gòu)成。系統(tǒng)組成如圖1所示。
組合導(dǎo)航系統(tǒng)的功能實(shí)現(xiàn)分為IMU數(shù)據(jù)接收與解析、GNSS數(shù)據(jù)接收與解析、氣壓計(jì)數(shù)據(jù)接收與解析、組合導(dǎo)航解算以及數(shù)據(jù)輸出五個(gè)部分。IMU數(shù)據(jù)接收與解析功能用來獲取導(dǎo)航解算中需要的加速度和角速度信息;GNSS數(shù)據(jù)接收與解析功能用來獲取導(dǎo)航解算中需要的位置和速度信息(松耦合組合)或者GNSS偽距和偽距率(緊耦合組合);氣壓計(jì)數(shù)據(jù)接收與解析功能用來獲取高度信息;組合導(dǎo)航解算功能為系統(tǒng)核心,用來進(jìn)行組合導(dǎo)航解算;數(shù)據(jù)的輸出包括原始數(shù)據(jù)包的整合輸出和解算結(jié)果的輸出。
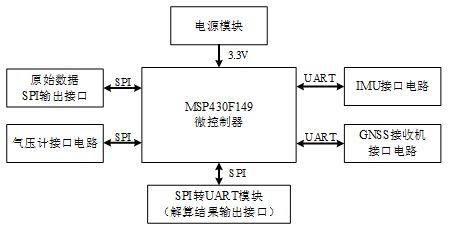
圖1 系統(tǒng)組成結(jié)構(gòu)圖
本文所使用的慣性器件和GNSS接收機(jī)都是RS-232電平的UART接口,具有通用性,用戶可根據(jù)成本考慮不同精度的設(shè)備。氣壓計(jì)選用美國MEAS公司生產(chǎn)的MS5803-02BA,已經(jīng)固化在電路中。
2 硬件電路設(shè)計(jì)
2.1微控制器接口
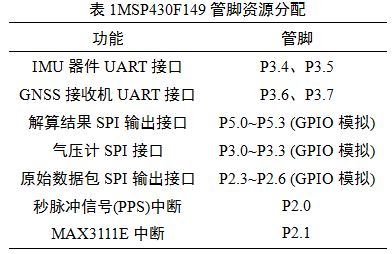
整個(gè)組合導(dǎo)航定位系統(tǒng)需要三個(gè)UART接口和兩個(gè)SPI接口。其中兩個(gè)UART接口由430單片機(jī)自帶的UART資源提供,另外一個(gè)UART接口由GPIO模擬SPI通過MAX3111E芯片轉(zhuǎn)化得到;兩個(gè)SPI接口由GPIO模擬得到。另外需要一個(gè)外部中斷引腳捕獲秒脈沖信號(PPS)、一個(gè)外部中斷引腳捕獲MAX3111E中斷信號。MSP430F149管腳資源分配如表1所示。
2.2電源電路
本系統(tǒng)供電需求為3.3V供電,因此采用AMS1117穩(wěn)壓芯片,接入5V電源即可輸出3.3V穩(wěn)定電壓,可提供1A電流,滿足系統(tǒng)供電需求。電路設(shè)計(jì)如圖2所示。
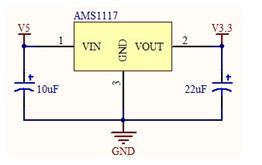
圖2 電源電路
2.3 IMU器件及GNSS接收機(jī)接口電路
IMU器件及GNSS接收機(jī)都采用UART接口方式接入,采用RS232協(xié)議。因此可使用430單片機(jī)上自帶的兩個(gè)UART接口,但是需要進(jìn)行TTL電平與RS232電平轉(zhuǎn)換。這里采用常見的MAX3232芯片,電路設(shè)計(jì)如圖3所示。
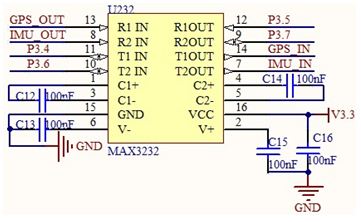
圖3 IMU及GNSS接口電路
2.4 氣壓計(jì)MS5803-02BA接口電路
MS5803-02BA[3]是由MEAS公司生產(chǎn)的數(shù)字壓力傳感器,分辨率達(dá)10cm。芯片內(nèi)部包含一個(gè)高線性的壓力傳感器和一個(gè)內(nèi)部工廠標(biāo)定系數(shù)的超低功耗24位ΔΣ型ADC。該款芯片有SPI和I2C兩種接口方式,通過芯片的PS引腳配置了選擇不同的接口方式(PS置低時(shí),采用SPI工作模式;PS置高時(shí),采用I2C工作模式)。本文所闡述的定位系統(tǒng)將氣壓計(jì)配置為SPI工作模式。MS5803-02BA與微控制器間的接口電路設(shè)計(jì)如圖4所示。
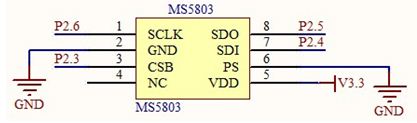
圖4 MS5803-02BA接口電路
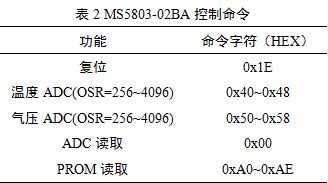
MS5803-02BA的控制命令包括復(fù)位命令、溫度ADC命令、氣壓ADC命令、ADC讀取命令、PROM讀取命令。控制命令如表2所示。
控制命令通過SDI口移位輸入,響應(yīng)結(jié)果從SDO移位輸出。輸入的電平判定在時(shí)鐘信號的上升沿,輸出的電平判定在時(shí)鐘信號的下降沿。輸出的氣壓值可以進(jìn)行溫度補(bǔ)償,需要利用芯片內(nèi)部PROM中的系數(shù)來補(bǔ)償。ADC讀取命令輸入之后,輸出24位ADC結(jié)果;PROM讀取命令輸入之后,輸出16位補(bǔ)償系數(shù)。
下面是讀取ADC的C語言代碼:
CSN_OFF_MS();//CS置低
SPI_WRITE_8BIT(CMD);//SDI移入8位CMD
delay_ms(10); //延時(shí)10ms
CSN_ON_MS();//CS置高
CSN_OFF_MS();//CS置低
SPI_WRITE_8BIT(0x00);//SDI移入8位0x00
result = SPI_READ_24BIT();//SDO移出24位
CSN_ON_MS();//CS置高
下面是讀取PROM的C語言代碼:
CSN_OFF_MS();//CS置低
SPI_WRITE_8BIT(CMD); //SDI移入8位CMD
result=SPI_READ_16BIT();//SDO移出24位
CSN_ON_MS();//CS置高
結(jié)合器件的使用手冊及手冊疏漏的地方,使用MS5803-02BA時(shí)需要注意:
1、溫度和氣壓ADC命令發(fā)送之后,芯片內(nèi)部需要一定的時(shí)間進(jìn)行采樣轉(zhuǎn)換,具體時(shí)間與過采樣率(OSR)有關(guān),最大需求時(shí)間為10ms,因此本文采用的延時(shí)時(shí)間為10ms;
2、片選信號CS的下降沿到時(shí)鐘SCLK信號的第一個(gè)上升沿至少要有21ns的時(shí)間延遲,否則命令無法正確寫入芯片;
3、8位的ADC讀取命令之后,必須保持CS片選信號持續(xù)為低,再產(chǎn)生24位時(shí)鐘信號輸入,將24位的ADC結(jié)果讀取出來(即一個(gè)命令字為8位,但實(shí)際需要32個(gè)連續(xù)的時(shí)鐘周期才能完整讀取ADC結(jié)果);
4、對于PROM讀取命令同ADC讀取命令,一共需要24個(gè)連續(xù)的時(shí)鐘周期完成,其中8位命令字輸入,16位數(shù)據(jù)讀出。
5、對于所有從SDO移位輸出數(shù)據(jù)的同時(shí),都需要SDI輸入端保持低電平。
2.5 SPI轉(zhuǎn)UART電路
由于MSP430F149的片上UART資源都被IMU器件和GNSS接收機(jī)占用,因此需要擴(kuò)充一個(gè)UART接口才能滿足定位系統(tǒng)與PC機(jī)間的通信。為此將MSP430F149上的GPIO模擬SPI,再通過MAX3111E芯片轉(zhuǎn)成UART接口。
MAX3111E是MAXIM公司推出的全功能收發(fā)器,內(nèi)部包含UART和RS232電平轉(zhuǎn)換兩個(gè)獨(dú)立的部分。UART部分包括兼容于SPI的串行接口、可編程波特率發(fā)生器、發(fā)送移位寄存器、接收移位寄存器、8字長的FIFO以及4種可屏蔽中斷發(fā)生器;RS232部分包括電泵電容、硬件關(guān)斷(SHDN管腳),具有±15kV靜電保護(hù)作用。它可以選擇1.8432MHz或3.6864MHz兩種晶振作為外部晶振,芯片能夠工作在300bps~230kbps波特率,本文使用的是3.6864MHz晶振。MAX3111E與MSP430F149連接電路如圖5。
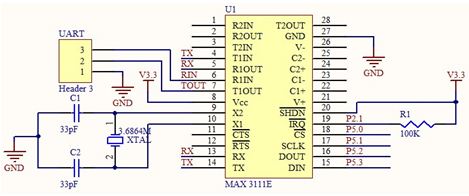
圖5 SPI轉(zhuǎn)UART電路
MAX3111E的控制命令分為寫配置命令、讀配置命令、寫數(shù)據(jù)命令以及讀數(shù)據(jù)命令四種。本文寫入芯片的配置命令是0xE809,8bit數(shù)據(jù)長度、使能FIFO、發(fā)送中斷使能、波特率38400bps。數(shù)據(jù)的寫入需要在每個(gè)字節(jié)前面加上0x81,例如若要發(fā)送字節(jié)0x55,則需要從DIN端移位輸入0x8155。
下面是連續(xù)發(fā)送n個(gè)字節(jié)的C語言代碼:
SPI_WRITE_16BIT(0xE809);//寫配置命令
delay_ms(10);//延時(shí)10ms
SPI_WRITE_16BIT(0x8100+DATA1);//發(fā)送第1個(gè)數(shù)據(jù)DATA1
delay_ns(250);//延時(shí)250ns
SPI_WRITE_16BIT(0x8100+DATA2);//發(fā)送第2個(gè)數(shù)據(jù)DATA2
……
delay_ns(250);//延時(shí)250ns
SPI_WRITE_16BIT(0x8100+DATAn);//發(fā)送第n個(gè)數(shù)據(jù)DATAn
使用MAX3111E時(shí)需要注意:
1、片選信號CS的下降沿到時(shí)鐘SCLK信號的第一個(gè)上升沿至少要有100ns的時(shí)間延遲;
2、芯片判定片選信號CS失效時(shí),需要CS管腳保持高電平的時(shí)間至少為200ns。因此當(dāng)需要連續(xù)發(fā)送數(shù)據(jù)時(shí),兩個(gè)寫數(shù)據(jù)命令之間至少需要200ns,建議間隔250ns;
3、寫配置命令需要晶振工作穩(wěn)定,因此可以在寫配置命令后再讀配置,直到寫入和讀出的配置數(shù)據(jù)相應(yīng)位相同時(shí)才保證芯片按需求配置完畢。
3 軟件設(shè)計(jì)
3.1 GPIO模擬SPI實(shí)現(xiàn)方法
使用GPIO模擬SPI,對選定的IO口進(jìn)行時(shí)序上的電平操作,模擬出SPI時(shí)序。本文將SPI的電平操作采用宏定義的方式,可參考表3中的源代碼。

程序按照SPI邏輯關(guān)系使用上述的宏定義,可以在選定的IO端口產(chǎn)生SPI信號,并且可以靈活的控制每個(gè)CS有效期間的時(shí)鐘數(shù)。使用GPIO模擬的SPI具有操作直觀、靈活可變等優(yōu)點(diǎn)。相比較模擬得到的SPI,控制器上自帶的SPI接口基本不占用控制器資源,發(fā)送和接收的移位、時(shí)鐘信號的產(chǎn)生都交由內(nèi)部SPI模塊處理。而GPIO模擬的SPI需要控制器不斷對IO進(jìn)行操作,因此會占用控制器處理時(shí)間。時(shí)鐘信號也因?qū)﹄娖讲僮飨臋C(jī)器周期,導(dǎo)致時(shí)鐘信號速度有限。
3.2 數(shù)據(jù)的采集和處理方法
IMU和GNSS接收機(jī)的數(shù)據(jù)會主動發(fā)送到430單片機(jī)的UART接口,本文采用中斷接收的方式接收數(shù)據(jù),將每次到來的一個(gè)字節(jié)循環(huán)存儲在指定的存儲區(qū);氣壓計(jì)需要430單片機(jī)查詢式獲取高度信息。因此當(dāng)需求IMU或者GNSS信息的時(shí)候,需要在存儲區(qū)內(nèi)掃描數(shù)據(jù),掃描依據(jù)是設(shè)備發(fā)送一幀數(shù)據(jù)的協(xié)議(幀頭、幀尾、CRC等),再根據(jù)協(xié)議獲取相應(yīng)物理量的數(shù)值;當(dāng)需要高度信息的時(shí)候,需要430單片機(jī)對氣壓計(jì)發(fā)送控制字獲取信息。在對IMU和GNSS信息掃描時(shí)需要一個(gè)變量ptr保存有效數(shù)據(jù)的首地址在存儲區(qū)內(nèi)的偏移地址,為了不重復(fù)使用已用數(shù)據(jù),需要在利用完信息后,破壞這一幀有效數(shù)據(jù)的幀頭幀尾。
另外需要注意,使用循環(huán)存儲數(shù)據(jù)和掃描取用這種方式,需要數(shù)據(jù)的處理速度比數(shù)據(jù)的接收速度快,否則舊數(shù)據(jù)會被新數(shù)據(jù)覆蓋。
3.3 高度計(jì)算方法
高度信息的獲取需要通過MS5803-02BA獲取的氣壓信息轉(zhuǎn)換得到。對這款氣壓計(jì)的操作,需要先在芯片內(nèi)部的PROM獲取C1~C6六個(gè)參數(shù),再獲取溫度ADC結(jié)果D1和氣壓ADC結(jié)果D2,最后利用官方提供的計(jì)算公式計(jì)算得到帶補(bǔ)償?shù)臍鈮褐怠鈮褐但@取的軟件流程圖如圖6。
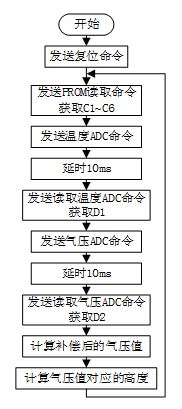
圖6 高度計(jì)算流程圖
按照氣壓計(jì)的用戶手冊中提供的計(jì)算公式,最后可以計(jì)算得到一個(gè)經(jīng)過溫度補(bǔ)償?shù)臉?biāo)準(zhǔn)氣壓值,單位mbar。高度信息的獲取還需要將氣壓值經(jīng)過函數(shù)關(guān)系轉(zhuǎn)換。高度h和標(biāo)準(zhǔn)大氣P之間有如下函數(shù)關(guān)系:
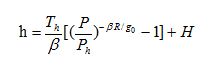
Th=288.15K,是g0對應(yīng)高度下的溫度下限值;β=-6.5K/km,是溫度的垂直變化率;H=0m,是g0對應(yīng)的高度;Ph=101325Pa,是g0對應(yīng)高度下的氣壓下限值;R=287.05287m2/(K●s2),是氣體常數(shù);g0=9.80665m/s2,是海平面重力加速度。
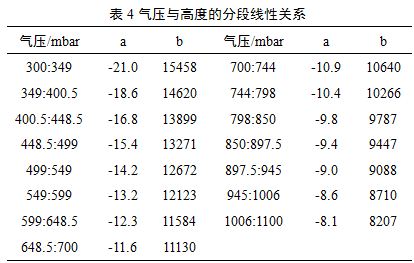
在氣壓與高度的關(guān)系轉(zhuǎn)換中,本文采用分段線性化的方法擬合它們的非線性關(guān)系。在不同氣壓值區(qū)間內(nèi),線性化公式得到h=a●P+b,取得不同的線性參數(shù)a、b,參考表4。
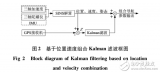
3.4 組合導(dǎo)航的時(shí)間對準(zhǔn)
進(jìn)行組合導(dǎo)航濾波解算時(shí),從IMU和GNSS接收機(jī)接收到的數(shù)據(jù)在時(shí)間上應(yīng)該是同步的,因?yàn)槿绻谝粋€(gè)數(shù)據(jù)融合點(diǎn)上,進(jìn)入Kalman濾波器的來自兩個(gè)子系統(tǒng)中的數(shù)據(jù)來自不同的時(shí)間點(diǎn),會給濾波計(jì)算帶來誤差,同時(shí)也會給校正計(jì)算帶來影響。GNSS接收機(jī)輸出的導(dǎo)航數(shù)據(jù)都帶有精確的時(shí)間標(biāo)簽,而從 IMU 輸出的數(shù)據(jù)只有一個(gè)相對時(shí)間標(biāo)簽。以GNSS接收機(jī)的時(shí)間標(biāo)簽作為時(shí)間基準(zhǔn),分析時(shí)間差的組成。系統(tǒng)時(shí)間示意圖如圖7所示。
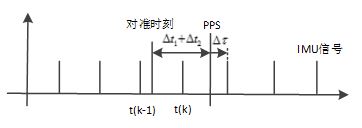
圖7 系統(tǒng)時(shí)鐘示意圖
3.4.1 時(shí)間差分析
當(dāng)一個(gè)GNSS數(shù)據(jù)(1Hz)到來時(shí),接收機(jī)產(chǎn)生一個(gè)秒脈沖信號(PPS),用于時(shí)間對準(zhǔn)。GNSS接收機(jī)本身存在數(shù)據(jù)時(shí)延:接收機(jī)整個(gè)計(jì)算過程會產(chǎn)生一個(gè)解算時(shí)間延遲△t1、從衛(wèi)星導(dǎo)航接收機(jī)和慣導(dǎo)系統(tǒng)輸出的數(shù)據(jù)分別經(jīng)過McBSP和RS-232數(shù)據(jù)接口輸入導(dǎo)航解算處理器會產(chǎn)生一定的傳輸延遲△t2。因此在PPS信號前的△t1+△t2時(shí)刻才是當(dāng)前接收到的GNSS數(shù)據(jù)幀的真實(shí)時(shí)刻。IMU數(shù)據(jù)處理時(shí)間相對于遞推時(shí)間來說很小,可以忽略。另外PPS脈沖信號和慣性測量信號之間的時(shí)間差△τ,它描述GNSS絕對時(shí)間和IMU相對時(shí)間之間的關(guān)系,使得GNSS和IMU統(tǒng)一在同一個(gè)時(shí)間標(biāo)準(zhǔn)下。
3.4.2 處理思想
根據(jù)總時(shí)間差△T =△t1+△t2+△τ,找到IMU數(shù)據(jù)對應(yīng)的插值時(shí)刻。通過時(shí)間△T就可以獲得對準(zhǔn)時(shí)間點(diǎn)與最近的兩個(gè)慣性采集時(shí)刻,其后對時(shí)間同步點(diǎn)兩側(cè)時(shí)間點(diǎn)上,即圖中t(k-1)和t(k)時(shí)間點(diǎn)的慣性數(shù)據(jù)進(jìn)行線性插值運(yùn)算,就可以獲得了慣導(dǎo)數(shù)據(jù)和GNSS接收機(jī)數(shù)據(jù)在同一時(shí)間點(diǎn)上的同步化測量數(shù)據(jù)。
3.4.3 實(shí)施方法
GNSS接收機(jī)解算時(shí)間△t1由接收機(jī)提供。
傳輸時(shí)間△t2通常為一個(gè)固定時(shí)間,使用示波器分別測量GNSS接收機(jī)發(fā)送時(shí)間和導(dǎo)航解算電路的接收時(shí)間,再將兩個(gè)時(shí)間作差即可獲得。
△τ的獲取需要開啟MSP430F149的計(jì)時(shí)器和外部中斷,通過中斷計(jì)時(shí)的方式獲得。具體方法是:通過將PPS信號接入導(dǎo)航處理器的外部中斷接口,采用邊沿觸發(fā)方式觸發(fā)中斷事件的發(fā)生。中斷事件啟動計(jì)時(shí)器工作。當(dāng)通過串口中斷方式接收到IMU數(shù)據(jù)時(shí),讀取計(jì)時(shí)器的值,即可得到IMU數(shù)據(jù)相對于PPS的延遲時(shí)間△τ。
結(jié)論
本文基于MSP430F149單片機(jī)設(shè)計(jì)的室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng),通過接口的擴(kuò)展使得該款定位系統(tǒng)能夠接入IMU、GNSS接收機(jī)、氣壓計(jì)三路信息,完成初步導(dǎo)航定位服務(wù)功能,同時(shí)可作為多路數(shù)據(jù)采集設(shè)備,將多路數(shù)據(jù)整合到一路高速輸出接口,用于進(jìn)一步的高精度導(dǎo)航解算。該系統(tǒng)根據(jù)使用者的需求不同,可接入不同成本和精度的設(shè)備,只要滿足RS-232協(xié)議即可。筆者將其實(shí)際運(yùn)用,整個(gè)系統(tǒng)充分利用該款單片機(jī)的資源,結(jié)構(gòu)簡單、功耗低、適用范圍廣,不僅可作為初步導(dǎo)航定位服務(wù)的設(shè)備,還可作為多路數(shù)據(jù)采集設(shè)備。
-
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632971 -
mcu
+關(guān)注
關(guān)注
146文章
16987瀏覽量
350300 -
移動機(jī)器人
+關(guān)注
關(guān)注
2文章
757瀏覽量
33543 -
uart
+關(guān)注
關(guān)注
22文章
1227瀏覽量
101171
發(fā)布評論請先 登錄
相關(guān)推薦
基于MCU的室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng)

Labview My RIO 移動機(jī)器人
基于MSP430F149單片機(jī)設(shè)計(jì)的室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng)
家庭移動機(jī)器人避障常用傳感器及相關(guān)技術(shù)
如何實(shí)現(xiàn)移動機(jī)器人的設(shè)計(jì)?
請問怎么設(shè)計(jì)一種室外移動機(jī)器人組合導(dǎo)航定位系統(tǒng)?
什么是移動機(jī)器人軟硬件系統(tǒng)問題
【科普】干貨!帶你從0了解移動機(jī)器人(三) ——自主導(dǎo)航系統(tǒng)及上位機(jī)軟件設(shè)計(jì)與實(shí)現(xiàn)
【科普】干貨!帶你從0了解移動機(jī)器人(四) ——移動機(jī)器人導(dǎo)航技術(shù)
移動機(jī)器人導(dǎo)航與定位技術(shù)
移動機(jī)器人導(dǎo)航與定位技術(shù)
基于ARM的移動機(jī)器人組合導(dǎo)航系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
9種常見導(dǎo)航系統(tǒng)的軟硬件設(shè)計(jì)
基于MSP430F149的室外移動機(jī)器人高精度組合導(dǎo)航系統(tǒng)

室外移動機(jī)器人分類

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論