") 基于MCU+DSP的運(yùn)動(dòng)控制硬件平臺(tái)設(shè)計(jì)
基于MCU+DSP的運(yùn)動(dòng)控制硬件平臺(tái)設(shè)計(jì)
引言
開(kāi)放式控制器體系結(jié)構(gòu)源于“開(kāi)放式”的PC(個(gè)人計(jì)算機(jī)) 技術(shù), 目前的開(kāi)放式運(yùn)動(dòng)控制器多為PC+運(yùn)動(dòng)控制卡結(jié)構(gòu), 隨著MCU(微控制器) 和DSP(數(shù)字信號(hào)處理器)性能的增強(qiáng), MUC和DSP取代PC的趨勢(shì)日趨明顯, 而這種嵌入式的緊湊結(jié)構(gòu)較PC有更廣泛的環(huán)境適應(yīng)性。MCU、DSP和PC差異較大, PC環(huán)境中的運(yùn)動(dòng)控制技術(shù)不可能直接向MCU和DSP系統(tǒng)中轉(zhuǎn)移, 基于MCU和DSP硬件平臺(tái)的運(yùn)動(dòng)控制技術(shù)的研究十分必要。
設(shè)計(jì)目標(biāo)與需求分析
運(yùn)動(dòng)控制系統(tǒng)發(fā)展方向
在開(kāi)放式控制器技術(shù)的推動(dòng)下, 運(yùn)動(dòng)控制系統(tǒng)由傳統(tǒng)的封閉式結(jié)構(gòu)朝著開(kāi)放、可重構(gòu)、網(wǎng)絡(luò)化方向發(fā)展。按照《開(kāi)放式數(shù)控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開(kāi)放式數(shù)控系統(tǒng)有三個(gè)層次的開(kāi)放, 第一層, 系統(tǒng)功能可配置, 人機(jī)界面、伺服驅(qū)動(dòng)單元的運(yùn)動(dòng)控制接口、邏輯控制單元接口均開(kāi)放; 第二層, 系統(tǒng)軟件體系結(jié)構(gòu)、拓?fù)浣Y(jié)構(gòu)和應(yīng)用軟件接口開(kāi)放, 第三方的應(yīng)用軟件能在系統(tǒng)中安裝運(yùn)行并實(shí)現(xiàn)互操作性, 且第三方的軟件模塊可以在拓?fù)浣Y(jié)構(gòu)不變的情況下對(duì)本系統(tǒng)軟件模塊置換和擴(kuò)展; 第三層, 系統(tǒng)實(shí)現(xiàn)可重構(gòu)。國(guó)標(biāo)GB/T 18759.1- 2002 尚未公布可重構(gòu)的詳細(xì)內(nèi)容。運(yùn)動(dòng)控制系統(tǒng)是數(shù)控系統(tǒng)的一個(gè)核心組件, 其技術(shù)發(fā)展方向和開(kāi)放式數(shù)控系統(tǒng)類(lèi)似。現(xiàn)代運(yùn)動(dòng)控制器聯(lián)通信息網(wǎng)、邏輯控制網(wǎng)和伺服控制網(wǎng)(接口) 三種網(wǎng)絡(luò)。
在MCU 和DSP 環(huán)境中運(yùn)動(dòng)控制技術(shù)的研究課題
和PC相比, MCU和DSP采用了哈佛結(jié)構(gòu), 流水線技術(shù), 超長(zhǎng)指令字, 加乘器等提高CPU速度, 并在片上擴(kuò)展了控制用前向和后向通道外設(shè)及通信接口, 在這種環(huán)境下, 實(shí)現(xiàn)開(kāi)放、可重構(gòu)和網(wǎng)絡(luò)化運(yùn)動(dòng)控制功能, 下列研究是必要的:
①體系結(jié)構(gòu)的研究, 以多CPU方式實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)控制;
②嵌入式系統(tǒng)中實(shí)時(shí)操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問(wèn)題;
③MCU和DSP環(huán)境中運(yùn)動(dòng)控制算法的研究, 解決少資源情況下, 復(fù)雜控制算法的實(shí)現(xiàn)問(wèn)題;
④軟件模塊管理與剪裁技術(shù)的研究, 解決通用技術(shù)方案的應(yīng)用針對(duì)性問(wèn)題;
⑤網(wǎng)絡(luò)通信技術(shù)的研究:解決伺服通信網(wǎng)、邏輯控制網(wǎng)和信息網(wǎng)通信問(wèn)題。
硬件系統(tǒng)設(shè)計(jì)目標(biāo)與結(jié)構(gòu)要求
基于MCU和DSP的運(yùn)動(dòng)控制技術(shù)研究硬件平臺(tái)的設(shè)計(jì)目標(biāo)是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運(yùn)動(dòng)控制器并不少見(jiàn),但它們只對(duì)用戶(hù)提供運(yùn)動(dòng)控制函數(shù)庫(kù)的接口, 并不是完全意義上的開(kāi)放, 必須開(kāi)發(fā)運(yùn)動(dòng)控制器的硬件研究平臺(tái), 并滿(mǎn)足下列要求:
①類(lèi)型與結(jié)構(gòu)化模式要求:CPU選型應(yīng)是主流的MCU和DSP芯片,結(jié)構(gòu)體系采用單CPU,雙CPU流水線模式和層次化結(jié)構(gòu), CPU可以獨(dú)立工作, 可以組成流水線模式工作。也可以采用兩層結(jié)構(gòu),上下層分別處理不同實(shí)時(shí)要求的任務(wù)。
②開(kāi)放性要求:各CPU單元配置計(jì)算機(jī)通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實(shí)現(xiàn)硬件互聯(lián)。
③網(wǎng)絡(luò)化要求:配有伺服單元接口、現(xiàn)場(chǎng)總線接口和以太網(wǎng)接口。
系統(tǒng)設(shè)計(jì)
運(yùn)動(dòng)控制系統(tǒng)硬件結(jié)構(gòu)
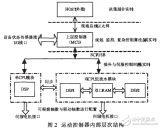
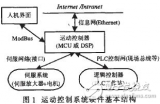
運(yùn)動(dòng)控制系統(tǒng)硬件基本結(jié)構(gòu)如圖1 所示:

控制器聯(lián)通人機(jī)界面和三種網(wǎng)絡(luò)。控制器與人機(jī)界面的聯(lián)接多采用開(kāi)放的工業(yè)現(xiàn)場(chǎng)總線ModBus 等;控制器通過(guò)以太網(wǎng)接口與Internet/Intranet聯(lián)接, 實(shí)現(xiàn)與管理信息系統(tǒng)的交互;控制器多通過(guò)現(xiàn)場(chǎng)總線如CAN、ModBus和RS485等與網(wǎng)絡(luò)化的PLC工作站通信, 處理控制對(duì)象的大量I/O;控制器和高速伺服網(wǎng)絡(luò)聯(lián)接, 傳送伺服放大器的控制信號(hào), 但該方案技術(shù)難度高, 只有少數(shù)企業(yè)采用專(zhuān)用的高速伺服通信網(wǎng)絡(luò)實(shí)現(xiàn)了伺服電機(jī)的組網(wǎng), 多數(shù)方案還是采用的規(guī)范化的電機(jī)接口, 一個(gè)伺服電機(jī)的接口如下:
①2路脈沖波形輸出, 其間相位差900, 或者其中一路可以作為方向信號(hào)( 高或低) ;
②1路AD輸出, 一般為±10V,位數(shù)為12位或16位;
③2路增量編碼器脈沖輸入, 一路來(lái)自伺服電機(jī),另一路來(lái)自執(zhí)行機(jī)構(gòu)終端;
④3路數(shù)字信號(hào)輸出, 包括伺服使能、正轉(zhuǎn)限制、反轉(zhuǎn)限制;
⑤4路數(shù)字信號(hào)輸入, 包括伺服準(zhǔn)備好、左極限、右極限和零位信號(hào);
上述接口電路也可以聯(lián)接步進(jìn)電機(jī)。
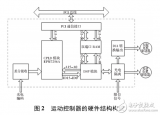
上層控制器處理復(fù)雜控制算法及弱實(shí)時(shí)任務(wù), 下層控制器處理插補(bǔ)與伺服控制等強(qiáng)實(shí)時(shí)任務(wù)。兩個(gè)DSP構(gòu)成雙DSP流水線模塊, 并行處理復(fù)雜實(shí)時(shí)控制任務(wù)。
運(yùn)動(dòng)控制系統(tǒng)研究硬件平臺(tái)設(shè)計(jì)
主芯片選型
MCU與DSP芯片選型的原則是適用與廣泛性原則, 選用的芯片適用于開(kāi)放式控制器設(shè)計(jì)并有廣泛的硬件與軟件資源。三星公司S3C2410A芯片采用ARM920T內(nèi)核, 主頻高達(dá)266MHz, 支持WinCE與Linux及μC/OS- II實(shí)時(shí)操作系統(tǒng), 可擴(kuò)展的地址空間1G, 并配有中斷、AD、UART、GPIO、觸摸屏和TFT接口等片上外設(shè); 德洲儀器公司的TMS320F2812DSP 芯片的主頻150MHz, 支持DSP/BIOS和μC/OS- II 實(shí)時(shí)操作系統(tǒng), 可擴(kuò)展的地址空間為1M, 并配有中斷、AD、串行接口、事件管理器等片上外設(shè)。這兩種CPU中,S3C2410A主要用于控制系統(tǒng)管理、監(jiān)控和復(fù)雜控制算法的實(shí)現(xiàn), DSP主要用于伺服電機(jī)接口和反饋、濾波等強(qiáng)實(shí)時(shí)控制算法的實(shí)現(xiàn)。
硬件系統(tǒng)配置
整個(gè)研究平臺(tái)硬件配置了三塊主機(jī)板和一個(gè)背板,:
三塊主機(jī)板可以單獨(dú)使用, 也可以組合使用, 它提供了MCU和DSP及雙DSP的硬件平臺(tái)S3C2410A。主機(jī)板的USB是Host, 另兩塊板的USB是Device配置, 另外, S3C2410A主機(jī)板和F2812主機(jī)板還通過(guò)背板有串口通信、GPIO及中斷溝通, 可以組合成一個(gè)以S3C2410A主機(jī)板為上位機(jī), F2812 - 1和F2812- 2主機(jī)板為下位機(jī)的雙層結(jié)構(gòu), S3C2410A主機(jī)板處理弱實(shí)時(shí)任務(wù), DSP處理強(qiáng)實(shí)時(shí)任務(wù);
弱實(shí)時(shí)任務(wù)包括系統(tǒng)監(jiān)控、模糊與神經(jīng)網(wǎng)絡(luò)等復(fù)雜控制算法, 強(qiáng)實(shí)時(shí)任務(wù)包括插補(bǔ)計(jì)算、數(shù)字濾波和PID控制等算法。由此來(lái)驗(yàn)證MCU和DSP環(huán)境中的算法可行性。
CPU 擴(kuò)展與外設(shè)配置
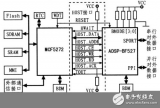
針對(duì)本系統(tǒng)設(shè)計(jì)要求, S3C2410A主機(jī)板原理框圖如圖4所示。選用兩片HY58V561620CT- H, 構(gòu)成16M×32位RAM空間; 選用兩片E28F128J3A150, 構(gòu)成16M×32 位Flash空間; CPLD選用XC9536, 用于GPIO地址譯碼和QEP接口的實(shí)現(xiàn), 選用DAC8534A串行16位DAC擴(kuò)展數(shù)模轉(zhuǎn)換接口, 采用CS8900A 以太網(wǎng)芯片擴(kuò)展網(wǎng)絡(luò)接口。
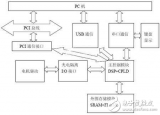
F2812-1主機(jī)板原理框圖如圖5所示, 選用IS61V5126, 擴(kuò)展256KROM空間, 選用AM29LV800BT擴(kuò)展512KFlash, 選用XC95144XL進(jìn)行GPIO地址譯碼, 選用AN2131Q作USB Device的擴(kuò)展, 在McBSP串口上擴(kuò)展16位DAC8534A用于伺服的速度與力矩控制。特別的, F2812提供了完善的伺服電機(jī)接口, 它有兩個(gè)事件管理器, 每個(gè)事件管理器包括兩個(gè)通用計(jì)數(shù)器, 三個(gè)比較/PWM單元, 三個(gè)捕捉單元, QEP通道。PWM和通用計(jì)數(shù)器配合可用作伺服控制器的位置控制模式輸入, QEP通道可用作伺服電機(jī)的位置編碼器脈沖輸入, 執(zhí)行器終端的編碼器信號(hào)通過(guò)CPLD擴(kuò)展QEP輸入。
F2812-2主機(jī)板原理框圖如圖6所示, 為了驗(yàn)證多電機(jī)的并行控制算法, 在F2812-1主機(jī)板的基礎(chǔ)上, 用雙口RAMIDT70V25將兩個(gè)CPU聯(lián)接起來(lái), 形成了一個(gè)對(duì)稱(chēng)結(jié)構(gòu)。按目前板上的電機(jī)接口配置, 每塊板可接兩路全閉環(huán)伺服電機(jī), F2812-2主機(jī)板可接四路全閉環(huán)的伺服電機(jī)。
結(jié)論
選用S3C2410A和F2812作運(yùn)動(dòng)控制系統(tǒng)的嵌入硬件研究平臺(tái), 組成一個(gè)多CPU的雙層控制器結(jié)構(gòu),既可以單獨(dú)進(jìn)行單MCU和DSP環(huán)境中的運(yùn)動(dòng)控制算法研究, 又可以進(jìn)行多CPU平行模式的復(fù)雜運(yùn)動(dòng)控制系統(tǒng)研究。系統(tǒng)簡(jiǎn)練、可靠, 符合運(yùn)動(dòng)控制器的開(kāi)放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向。
審核編輯 黃宇
開(kāi)放式控制器體系結(jié)構(gòu)源于“開(kāi)放式”的PC(個(gè)人計(jì)算機(jī)) 技術(shù), 目前的開(kāi)放式運(yùn)動(dòng)控制器多為PC+運(yùn)動(dòng)控制卡結(jié)構(gòu), 隨著MCU(微控制器) 和DSP(數(shù)字信號(hào)處理器)性能的增強(qiáng), MUC和DSP取代PC的趨勢(shì)日趨明顯, 而這種嵌入式的緊湊結(jié)構(gòu)較PC有更廣泛的環(huán)境適應(yīng)性。MCU、DSP和PC差異較大, PC環(huán)境中的運(yùn)動(dòng)控制技術(shù)不可能直接向MCU和DSP系統(tǒng)中轉(zhuǎn)移, 基于MCU和DSP硬件平臺(tái)的運(yùn)動(dòng)控制技術(shù)的研究十分必要。
設(shè)計(jì)目標(biāo)與需求分析
運(yùn)動(dòng)控制系統(tǒng)發(fā)展方向
在開(kāi)放式控制器技術(shù)的推動(dòng)下, 運(yùn)動(dòng)控制系統(tǒng)由傳統(tǒng)的封閉式結(jié)構(gòu)朝著開(kāi)放、可重構(gòu)、網(wǎng)絡(luò)化方向發(fā)展。按照《開(kāi)放式數(shù)控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開(kāi)放式數(shù)控系統(tǒng)有三個(gè)層次的開(kāi)放, 第一層, 系統(tǒng)功能可配置, 人機(jī)界面、伺服驅(qū)動(dòng)單元的運(yùn)動(dòng)控制接口、邏輯控制單元接口均開(kāi)放; 第二層, 系統(tǒng)軟件體系結(jié)構(gòu)、拓?fù)浣Y(jié)構(gòu)和應(yīng)用軟件接口開(kāi)放, 第三方的應(yīng)用軟件能在系統(tǒng)中安裝運(yùn)行并實(shí)現(xiàn)互操作性, 且第三方的軟件模塊可以在拓?fù)浣Y(jié)構(gòu)不變的情況下對(duì)本系統(tǒng)軟件模塊置換和擴(kuò)展; 第三層, 系統(tǒng)實(shí)現(xiàn)可重構(gòu)。國(guó)標(biāo)GB/T 18759.1- 2002 尚未公布可重構(gòu)的詳細(xì)內(nèi)容。運(yùn)動(dòng)控制系統(tǒng)是數(shù)控系統(tǒng)的一個(gè)核心組件, 其技術(shù)發(fā)展方向和開(kāi)放式數(shù)控系統(tǒng)類(lèi)似。現(xiàn)代運(yùn)動(dòng)控制器聯(lián)通信息網(wǎng)、邏輯控制網(wǎng)和伺服控制網(wǎng)(接口) 三種網(wǎng)絡(luò)。
在MCU 和DSP 環(huán)境中運(yùn)動(dòng)控制技術(shù)的研究課題
和PC相比, MCU和DSP采用了哈佛結(jié)構(gòu), 流水線技術(shù), 超長(zhǎng)指令字, 加乘器等提高CPU速度, 并在片上擴(kuò)展了控制用前向和后向通道外設(shè)及通信接口, 在這種環(huán)境下, 實(shí)現(xiàn)開(kāi)放、可重構(gòu)和網(wǎng)絡(luò)化運(yùn)動(dòng)控制功能, 下列研究是必要的:
①體系結(jié)構(gòu)的研究, 以多CPU方式實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)控制;
②嵌入式系統(tǒng)中實(shí)時(shí)操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問(wèn)題;
③MCU和DSP環(huán)境中運(yùn)動(dòng)控制算法的研究, 解決少資源情況下, 復(fù)雜控制算法的實(shí)現(xiàn)問(wèn)題;
④軟件模塊管理與剪裁技術(shù)的研究, 解決通用技術(shù)方案的應(yīng)用針對(duì)性問(wèn)題;
⑤網(wǎng)絡(luò)通信技術(shù)的研究:解決伺服通信網(wǎng)、邏輯控制網(wǎng)和信息網(wǎng)通信問(wèn)題。
硬件系統(tǒng)設(shè)計(jì)目標(biāo)與結(jié)構(gòu)要求
基于MCU和DSP的運(yùn)動(dòng)控制技術(shù)研究硬件平臺(tái)的設(shè)計(jì)目標(biāo)是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運(yùn)動(dòng)控制器并不少見(jiàn),但它們只對(duì)用戶(hù)提供運(yùn)動(dòng)控制函數(shù)庫(kù)的接口, 并不是完全意義上的開(kāi)放, 必須開(kāi)發(fā)運(yùn)動(dòng)控制器的硬件研究平臺(tái), 并滿(mǎn)足下列要求:
①類(lèi)型與結(jié)構(gòu)化模式要求:CPU選型應(yīng)是主流的MCU和DSP芯片,結(jié)構(gòu)體系采用單CPU,雙CPU流水線模式和層次化結(jié)構(gòu), CPU可以獨(dú)立工作, 可以組成流水線模式工作。也可以采用兩層結(jié)構(gòu),上下層分別處理不同實(shí)時(shí)要求的任務(wù)。
②開(kāi)放性要求:各CPU單元配置計(jì)算機(jī)通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實(shí)現(xiàn)硬件互聯(lián)。
③網(wǎng)絡(luò)化要求:配有伺服單元接口、現(xiàn)場(chǎng)總線接口和以太網(wǎng)接口。
系統(tǒng)設(shè)計(jì)
運(yùn)動(dòng)控制系統(tǒng)硬件結(jié)構(gòu)
運(yùn)動(dòng)控制系統(tǒng)硬件基本結(jié)構(gòu)如圖1 所示:
控制器聯(lián)通人機(jī)界面和三種網(wǎng)絡(luò)。控制器與人機(jī)界面的聯(lián)接多采用開(kāi)放的工業(yè)現(xiàn)場(chǎng)總線ModBus 等;控制器通過(guò)以太網(wǎng)接口與Internet/Intranet聯(lián)接, 實(shí)現(xiàn)與管理信息系統(tǒng)的交互;控制器多通過(guò)現(xiàn)場(chǎng)總線如CAN、ModBus和RS485等與網(wǎng)絡(luò)化的PLC工作站通信, 處理控制對(duì)象的大量I/O;控制器和高速伺服網(wǎng)絡(luò)聯(lián)接, 傳送伺服放大器的控制信號(hào), 但該方案技術(shù)難度高, 只有少數(shù)企業(yè)采用專(zhuān)用的高速伺服通信網(wǎng)絡(luò)實(shí)現(xiàn)了伺服電機(jī)的組網(wǎng), 多數(shù)方案還是采用的規(guī)范化的電機(jī)接口, 一個(gè)伺服電機(jī)的接口如下:
①2路脈沖波形輸出, 其間相位差900, 或者其中一路可以作為方向信號(hào)( 高或低) ;
②1路AD輸出, 一般為±10V,位數(shù)為12位或16位;
③2路增量編碼器脈沖輸入, 一路來(lái)自伺服電機(jī),另一路來(lái)自執(zhí)行機(jī)構(gòu)終端;
④3路數(shù)字信號(hào)輸出, 包括伺服使能、正轉(zhuǎn)限制、反轉(zhuǎn)限制;
⑤4路數(shù)字信號(hào)輸入, 包括伺服準(zhǔn)備好、左極限、右極限和零位信號(hào);
上述接口電路也可以聯(lián)接步進(jìn)電機(jī)。
上層控制器處理復(fù)雜控制算法及弱實(shí)時(shí)任務(wù), 下層控制器處理插補(bǔ)與伺服控制等強(qiáng)實(shí)時(shí)任務(wù)。兩個(gè)DSP構(gòu)成雙DSP流水線模塊, 并行處理復(fù)雜實(shí)時(shí)控制任務(wù)。
運(yùn)動(dòng)控制系統(tǒng)研究硬件平臺(tái)設(shè)計(jì)
主芯片選型
MCU與DSP芯片選型的原則是適用與廣泛性原則, 選用的芯片適用于開(kāi)放式控制器設(shè)計(jì)并有廣泛的硬件與軟件資源。三星公司S3C2410A芯片采用ARM920T內(nèi)核, 主頻高達(dá)266MHz, 支持WinCE與Linux及μC/OS- II實(shí)時(shí)操作系統(tǒng), 可擴(kuò)展的地址空間1G, 并配有中斷、AD、UART、GPIO、觸摸屏和TFT接口等片上外設(shè); 德洲儀器公司的TMS320F2812DSP 芯片的主頻150MHz, 支持DSP/BIOS和μC/OS- II 實(shí)時(shí)操作系統(tǒng), 可擴(kuò)展的地址空間為1M, 并配有中斷、AD、串行接口、事件管理器等片上外設(shè)。這兩種CPU中,S3C2410A主要用于控制系統(tǒng)管理、監(jiān)控和復(fù)雜控制算法的實(shí)現(xiàn), DSP主要用于伺服電機(jī)接口和反饋、濾波等強(qiáng)實(shí)時(shí)控制算法的實(shí)現(xiàn)。
硬件系統(tǒng)配置
整個(gè)研究平臺(tái)硬件配置了三塊主機(jī)板和一個(gè)背板,:
三塊主機(jī)板可以單獨(dú)使用, 也可以組合使用, 它提供了MCU和DSP及雙DSP的硬件平臺(tái)S3C2410A。主機(jī)板的USB是Host, 另兩塊板的USB是Device配置, 另外, S3C2410A主機(jī)板和F2812主機(jī)板還通過(guò)背板有串口通信、GPIO及中斷溝通, 可以組合成一個(gè)以S3C2410A主機(jī)板為上位機(jī), F2812 - 1和F2812- 2主機(jī)板為下位機(jī)的雙層結(jié)構(gòu), S3C2410A主機(jī)板處理弱實(shí)時(shí)任務(wù), DSP處理強(qiáng)實(shí)時(shí)任務(wù);
弱實(shí)時(shí)任務(wù)包括系統(tǒng)監(jiān)控、模糊與神經(jīng)網(wǎng)絡(luò)等復(fù)雜控制算法, 強(qiáng)實(shí)時(shí)任務(wù)包括插補(bǔ)計(jì)算、數(shù)字濾波和PID控制等算法。由此來(lái)驗(yàn)證MCU和DSP環(huán)境中的算法可行性。
CPU 擴(kuò)展與外設(shè)配置
針對(duì)本系統(tǒng)設(shè)計(jì)要求, S3C2410A主機(jī)板原理框圖如圖4所示。選用兩片HY58V561620CT- H, 構(gòu)成16M×32位RAM空間; 選用兩片E28F128J3A150, 構(gòu)成16M×32 位Flash空間; CPLD選用XC9536, 用于GPIO地址譯碼和QEP接口的實(shí)現(xiàn), 選用DAC8534A串行16位DAC擴(kuò)展數(shù)模轉(zhuǎn)換接口, 采用CS8900A 以太網(wǎng)芯片擴(kuò)展網(wǎng)絡(luò)接口。
F2812-1主機(jī)板原理框圖如圖5所示, 選用IS61V5126, 擴(kuò)展256KROM空間, 選用AM29LV800BT擴(kuò)展512KFlash, 選用XC95144XL進(jìn)行GPIO地址譯碼, 選用AN2131Q作USB Device的擴(kuò)展, 在McBSP串口上擴(kuò)展16位DAC8534A用于伺服的速度與力矩控制。特別的, F2812提供了完善的伺服電機(jī)接口, 它有兩個(gè)事件管理器, 每個(gè)事件管理器包括兩個(gè)通用計(jì)數(shù)器, 三個(gè)比較/PWM單元, 三個(gè)捕捉單元, QEP通道。PWM和通用計(jì)數(shù)器配合可用作伺服控制器的位置控制模式輸入, QEP通道可用作伺服電機(jī)的位置編碼器脈沖輸入, 執(zhí)行器終端的編碼器信號(hào)通過(guò)CPLD擴(kuò)展QEP輸入。
F2812-2主機(jī)板原理框圖如圖6所示, 為了驗(yàn)證多電機(jī)的并行控制算法, 在F2812-1主機(jī)板的基礎(chǔ)上, 用雙口RAMIDT70V25將兩個(gè)CPU聯(lián)接起來(lái), 形成了一個(gè)對(duì)稱(chēng)結(jié)構(gòu)。按目前板上的電機(jī)接口配置, 每塊板可接兩路全閉環(huán)伺服電機(jī), F2812-2主機(jī)板可接四路全閉環(huán)的伺服電機(jī)。
結(jié)論
選用S3C2410A和F2812作運(yùn)動(dòng)控制系統(tǒng)的嵌入硬件研究平臺(tái), 組成一個(gè)多CPU的雙層控制器結(jié)構(gòu),既可以單獨(dú)進(jìn)行單MCU和DSP環(huán)境中的運(yùn)動(dòng)控制算法研究, 又可以進(jìn)行多CPU平行模式的復(fù)雜運(yùn)動(dòng)控制系統(tǒng)研究。系統(tǒng)簡(jiǎn)練、可靠, 符合運(yùn)動(dòng)控制器的開(kāi)放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向。
審核編輯 黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
dsp
+關(guān)注
關(guān)注
552文章
7962瀏覽量
348256 -
mcu
+關(guān)注
關(guān)注
146文章
16987瀏覽量
350299 -
控制器
+關(guān)注
關(guān)注
112文章
16198瀏覽量
177398 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
565瀏覽量
32825
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一“芯”二用,MCU+DSP處理器大盤(pán)點(diǎn)(1)
本系列文章將為你介紹市面上比較流行的基于MCU+DSP架構(gòu)的處理器或者解決方案。##DSP56800E 結(jié)構(gòu)具有一系列新的特點(diǎn),用于提高系統(tǒng)性能,降低應(yīng)用成本,簡(jiǎn)化產(chǎn)品開(kāi)發(fā)。##DSP
發(fā)表于 08-14 09:36
?8373次閱讀

MCU+DSP嵌入式平臺(tái)的i機(jī)接口與引導(dǎo)設(shè)計(jì)
自動(dòng)化控制要求實(shí)時(shí)采集數(shù)據(jù),快速控制,多樣分析,通信靈活,雖然采用單個(gè)處理器構(gòu)成的硬件平臺(tái)不能滿(mǎn)足要求。采用以MCU+DSP雙處理器為核心的
發(fā)表于 08-01 10:59
【TL6748 DSP申請(qǐng)】基于DSP2812的運(yùn)動(dòng)控制平臺(tái)項(xiàng)目開(kāi)發(fā)。
申請(qǐng)理由: 項(xiàng)目要求,用DSP開(kāi)發(fā)板做出一個(gè)運(yùn)動(dòng)小車(chē)的運(yùn)動(dòng)監(jiān)控平臺(tái)項(xiàng)目,現(xiàn)在需要搭建硬件系統(tǒng)環(huán)境,需開(kāi)發(fā)板一套。項(xiàng)目描述: 在整個(gè)
發(fā)表于 09-10 11:15
MCU+DSP雙處理器的嵌入式平臺(tái)
自動(dòng)化控制要求實(shí)時(shí)采集數(shù)據(jù),快速控制,多樣分析,通信靈活,雖然采用單個(gè)處理器構(gòu)成的硬件平臺(tái)不能滿(mǎn)足要求。采用以MCU+DSP雙處理器為核心的
發(fā)表于 06-10 05:00
DSP怎么通過(guò)主機(jī)DMA端口實(shí)現(xiàn)通信?
自動(dòng)化控制要求實(shí)時(shí)采集數(shù)據(jù),快速控制,多樣分析,通信靈活,雖然采用單個(gè)處理器構(gòu)成的硬件平臺(tái)不能滿(mǎn)足要求。采用以MCU+DSP雙處理器為核心的
發(fā)表于 03-12 08:09
基于MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)
基于MCU和DSP的運(yùn)動(dòng)控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機(jī)與MCU和DSP
發(fā)表于 09-23 11:13
?11次下載
基于DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
為了滿(mǎn)足CNC齒輪測(cè)量中心的測(cè)量精要求,針對(duì)定點(diǎn)數(shù)字信號(hào)處理器(DSP)TMS320LF2407A的特點(diǎn),設(shè)計(jì)一種以DSP運(yùn)動(dòng)控制為核心的運(yùn)動(dòng)
發(fā)表于 02-11 12:23
?79次下載
基于DSP的運(yùn)動(dòng)控制器的開(kāi)發(fā)
基于DSP的運(yùn)動(dòng)控制器的開(kāi)發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)
發(fā)表于 12-25 09:44
?2106次閱讀

MCU+DSP雙處理器的嵌入式平臺(tái)構(gòu)建
采用以MCU+DSP雙處理器為核心的硬件平臺(tái)則是較合理的設(shè)計(jì)方案。利用DSP實(shí)現(xiàn)數(shù)據(jù)實(shí)時(shí)采集、分析、計(jì)算;MCU完成管理、通信、人機(jī)接口等異
發(fā)表于 08-04 12:01
?1214次閱讀

MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)
MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)
發(fā)表于 10-19 13:20
?6次下載
DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
發(fā)表于 10-19 14:58
?12次下載
MCU+DSP嵌入式平臺(tái)的i機(jī)接口設(shè)計(jì)
自動(dòng)化控制要求實(shí)時(shí)采集數(shù)據(jù),快速控制,多樣分析,通信靈活,雖然采用單個(gè)處理器構(gòu)成的硬件平臺(tái)不能滿(mǎn)足要求。采用以MCU+DSP雙處理器為核心的
發(fā)表于 10-29 10:27
?0次下載
基于DSP的運(yùn)動(dòng)控制器的探究
1 運(yùn)動(dòng)控制器硬件結(jié)構(gòu) 本運(yùn)動(dòng)控制器的硬件結(jié)構(gòu)主要分為如下幾個(gè)模塊:
發(fā)表于 11-03 10:30
?2次下載
基于MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)解析
的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)遵從運(yùn)動(dòng)控制系統(tǒng)的開(kāi)放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向, 選用主流的
發(fā)表于 11-03 16:07
?1次下載
江蘇宏云陶建平:MCU+DSP芯片架構(gòu)用于無(wú)線充電
2018年4月27日,在電子發(fā)燒友主辦的無(wú)線充電研討會(huì)上,來(lái)自云技術(shù)有限公司董事長(zhǎng)兼總經(jīng)理陶建平,從三方面入手,分享了基于MCU+DSP芯片方案。





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論