 工業視覺基礎--工業相機
工業視覺基礎--工業相機
01
工業相機
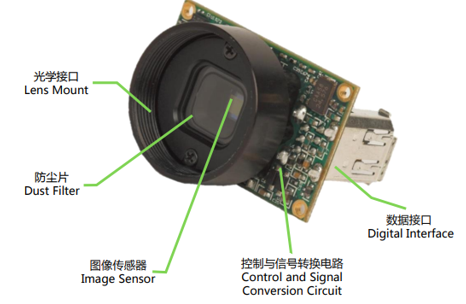
工業相機又稱攝像機,相比于傳統的民用相機(攝像機)而言,它具有高的圖像穩定性、高傳輸能力和高抗干擾能力等,目前市面上的工業相機大多是基于CCD(Charge CoupledDevice)或CMOS(Complementary MetalOxide Semiconductor)芯片的相機。
02
相機分類
按照芯片類型:CCD相機、CMOS相機;
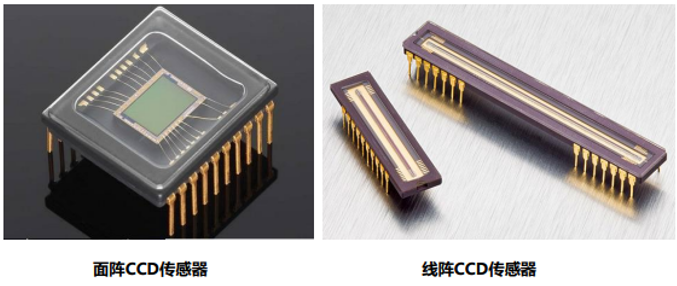
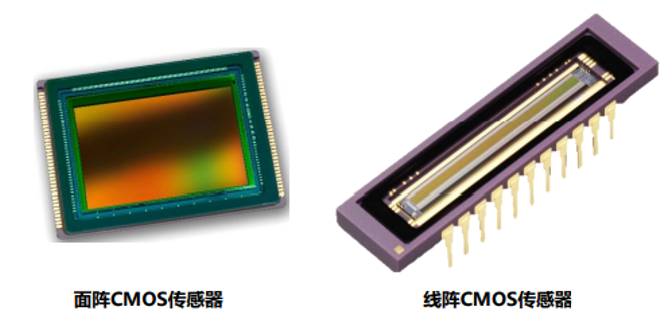
按照傳感器的結構特性:線陣相機、面陣相機;
按照掃描方式:隔行掃描相機、逐行掃描相機;
按照分辨率:普通分辨率相機、高分辨率相機;
按照輸出色彩:單色(黑白)相機、彩色相機;
按照輸出信號速度:普通速度相機、高速相機;
按照響應頻率范圍:可見光(普通)相機、紅外相機、紫外相機等。
03
CCD和CMOS
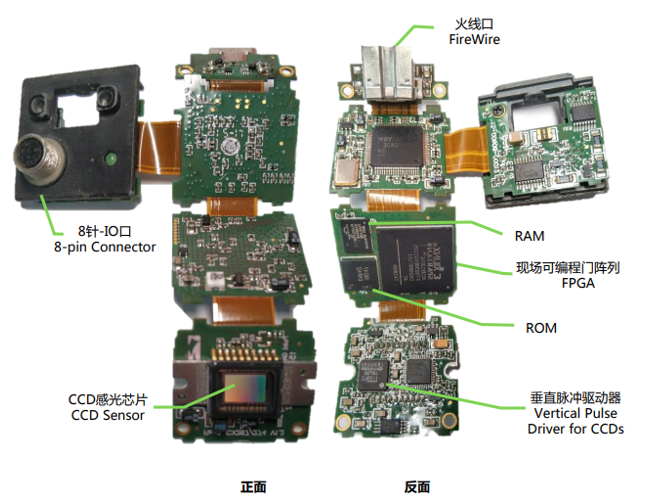
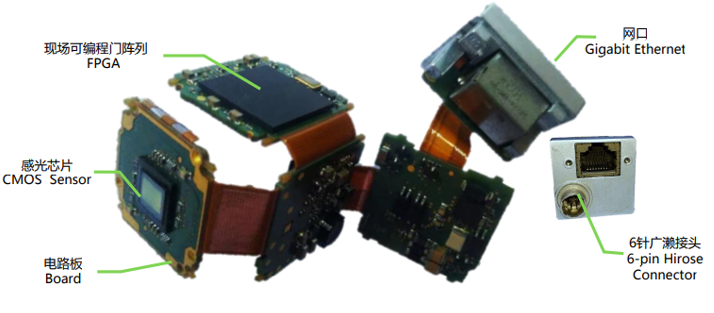
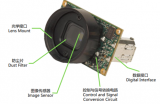
CCD是目前機器視覺最為常用的圖像傳感器。CCD相機由防塵片、傳感器芯片、FPGA、RAM和ROM、火線口和I/O接口等組成。 工作原理:被攝物體一方的光線經過光學鏡頭聚焦至CCD芯片上,在驅動電路的驅動脈沖下CCD完成光電荷的轉換、存儲、轉移和讀取、從而將光學信號轉換為電信號輸出。CCD的突出特點是以電荷作為信號,而不同于其它器件是以電流或者電壓為信號。CCD作為一種功能器件,與真空管相比,具有無灼傷、無滯后、低電壓工作、低功耗等優點。
CMOS圖像傳感器的開發最早出現在20世紀70年代初,90年代初期,隨著超大規模集成電路(VLSI)制造工藝技術的發展,CMOS圖像傳感器得到迅速發展。CMOS指的是制造圖像傳感器的過程而不是特定的成像技術。
CMOS圖像傳感器將光敏元陣列、圖像信號放大器、信號讀取電路、模數轉換電路、圖像信號處理器及控制器集成在一塊芯片上,具有局部像素的編程隨機訪問的優點。
目前,CMOS圖像傳感器以其良好的集成性、低功耗、高速傳輸和寬動態范圍等特點在高分辨率和高速場合得到了廣泛的應用。
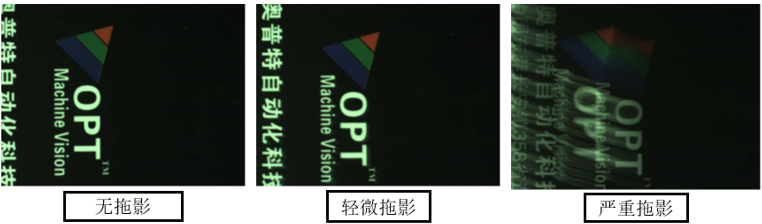
區別:當強光照射CCD傳感器時,采集的圖像中會出現光暈(Blooming)和拖尾(Smear)現象,嚴重影響成像質量。


解決方法:調整相機增益;減少光線或者曝光時間,增加CCD讀出速率;選擇CMOS芯片(結構上解決)。
04
相機基本術語
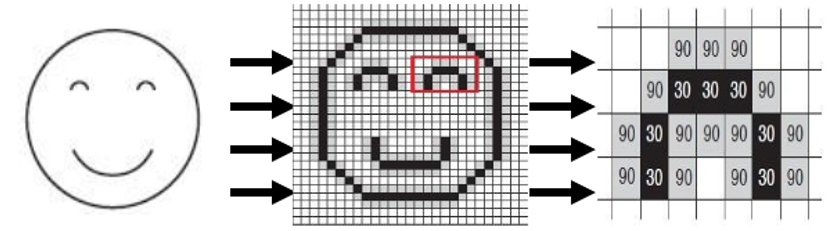
像素:感光器件上的基本感光單元,即相機識別到的圖像上的最小單元(圖中的每一個小格就是一個像素)。
像元與像元尺寸:像元是芯片的組成單位,是實現光電信號轉換的基本單元。像元尺寸一般為微米級(3-10微米) 像元深度:每像素數據的位數,對于黑白相機來說,像元深度定于灰度由暗到亮的灰階數。一般常用的是8bit,還有10bit,12bit等。

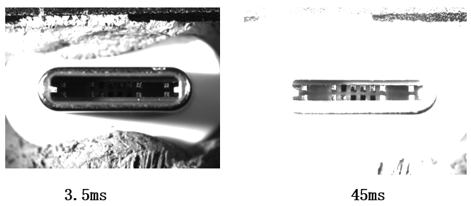
曝光時間:是指相機從快門打開到關閉的時間間隔,曝光時間越長,圖片越亮,同時,抗震動能力越差。對運動物體拍攝時,曝光時間越長,產生的拖影越長。過長的曝光時間會使相機的幀率降低。
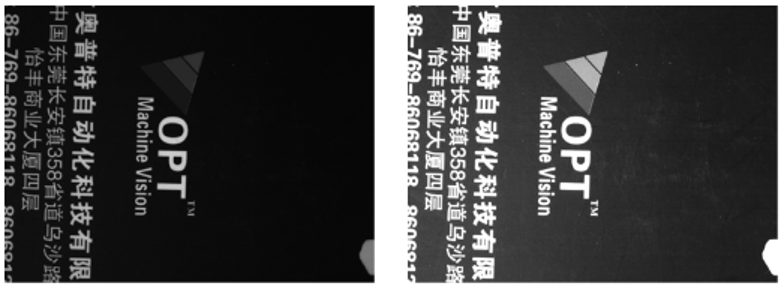
分辨率:圖像上單個單個像素所代表的實際尺寸,分辨率=視野/像素數(同方向)。 幀率:單位為FPS(frame per second),即幀/秒,指相機每秒鐘能采集多少幅圖像,1幅圖像為1幀。例如15幀/秒,表示相機一秒鐘最大能采集15幅圖像。一般來說,分辨率越大的相機,幀率越低。最高幀率是相機的重要性能參數之一,主要取決于采集速度、數據轉換速度和數據傳輸速度。 行頻:線陣工業相機的速度即行頻的單位是KHz。比如:12KHz表示線陣工業相機在1秒鐘內最多能采集12000行圖像數據。 增益:將圖片的數字信息同時擴大,當圖片比較昏暗時,可以增加對比度和亮度,提高成像效果。但是當圖片已經很亮時,擴大增益會適得其反。
噪聲:相機芯片電路和信號傳輸電路中形成的干擾信號,導致圖像中出現非實物反映的圖像。拖影:拍攝運動圖像時,同一物體,在圖片上重復成像的現象。
-
CMOS
+關注
關注
58文章
5689瀏覽量
235170 -
圖像傳感器
+關注
關注
68文章
1886瀏覽量
129464 -
工業相機
+關注
關注
5文章
316瀏覽量
23599
原文標題:工業視覺基礎--工業相機
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦



康耐視COGNEX工業相機視覺系統智能相機IS5705-21高價回收
深圳康耐視CCD工業視覺相機高價回收
無錫回收基恩士工業視覺系統,工業相機 工業視覺系統等
解析工業相機如何進行視覺檢測
如何挑選合適的視覺檢測工業相機
工業視覺:工業相機的常見參數





 工商網監
工商網監
評論