 造船碼頭行車限位器與駕駛室控制柜無線通訊
造船碼頭行車限位器與駕駛室控制柜無線通訊
隨著我國海洋交通的快速發展,船舶信息化管理的建設,無線通信資源的配置,將先進的無線通信技術引入水上交通安全的監管業務中已是大勢所趨。碼頭安裝(設備和系統的安裝) 船舶下水后常停靠于廠內舾裝碼頭, 以安裝船體設備, 機電設備,管道和電纜, 并進行艙室的木作, 絕緣和油漆等工作。通常采用行車、電動葫蘆等起重機械設備來完成重物的提升、下降、平移搬運,從而減輕勞動強度,提升生產效率。將重機械設備與無線技術相結合,這對于海事管理信息化也有著重大意義。無線自組網技術能解決對整個港口及航線交通可視、可測、可控的問題。
行車與駕駛室控制柜之間無線通訊:
行車/電動葫蘆起重機械限位器是用來限制機構運行范圍的一種防護裝置。當達到上升/下降限位位置時,限位器能自動切斷電源,使行車/電動葫蘆機構停止運行,防止吊鉤繼續上升拉斷鋼絲繩從而發生墜落事故;當行車/電動葫蘆運行到限位位置后,防護尺帶動限位開關的閉合觸頭分開而切斷電源,運行機構將停止運轉,進而在允許的制動距離內停車,避免硬性碰撞致使擋體對運行的行車/電動葫蘆產生過度的沖擊碰撞。大大提升了產品的性能,減少起重事故的發生。
由于碼頭船舶安裝各工序復雜,為了改善操作環境、提高行車和電動葫蘆的可靠性和靈活性,進行操作室控制系統的結構優化、操縱的智能化、駕駛室的人性化等更新升級。本次需要對于行車、電動葫蘆的控制系統進行無線技改,故考慮用無線的方式實現行車/電動葫蘆端限位器與駕駛室控制柜之間的通訊。
系統設計要求:
1.行車電動葫蘆起重機械系統共4組:#A、#B、#C、#D。分別為A行車折臂與A電動葫蘆組、B行車折臂與B電動葫蘆組、C行車折臂與C電動葫蘆組、D行車折臂與D電動葫蘆組。
2.主副駕駛室通過操作臺控制行車/電動葫蘆的限位器來實現起重機械系統作業。即完成行車/電動葫蘆端運行、上升下降等類型限位器的開關量無線傳輸功能。行車/電動葫蘆接收到駕駛室發來的作業指令,自動配合行車/電動葫蘆的移動限位功能,從而配合船駁制造安裝工作有序高效進行。
3.主副駕駛室與行車/電動葫蘆距離50米以內,中間有少部分鋼架結構遮擋。
4.主駕駛室控制操作A行車折臂與A電動葫蘆組、B行車折臂與B電動葫蘆組作業;副駕駛室控制操作C行車折臂與C電動葫蘆組、D行車折臂與D電動葫蘆組作業。
5.每組行車折臂控制系統指令有:折臂1上升、折臂1下降、折臂2上升、折臂2下降、折臂故障;每組電動葫蘆控制系統指令為:前進限位、后退限位、超重、存放到位、葫蘆左移限位、葫蘆右移限位、備用。
無線解決方案:
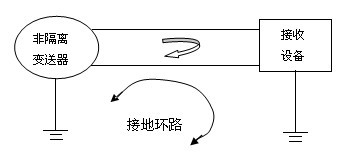
現場及駕駛室內同時存在對講機系統、手持無線遙控器系統、駕駛室高頻語音對講系統等無線通訊設備,以及為行車/電葫蘆滑動供電的高壓電纜及碼頭鋼架結構,都對我們的無線控制系統給出了嚴苛的考驗。一旦無線控制部分出現問題,會對行車及電葫蘆設備產生不可逆的損失。因此可采用具有全數字無線信道加密功能的工業級無線開關量傳輸器來實現主副駕駛室與行車/電動葫蘆端限位器的無線通訊。此套設備可以實現,8組不同功能的無線通訊設備同時工作,每個信道皆為獨立加密信道,大大降低無線通訊過程中信號受到外界環境干擾的可能性。
無線通訊方案示意圖 ▼

方案的實施,采用8套工業級無線開關量傳輸器DTD120HA來完成駕駛室控制柜與4組行車折臂和4組電動葫蘆限位器的無線通訊工作。在#A、#B、#C、#D四組行車及電動葫蘆控制柜端分別安裝一塊工業級無線開關量傳輸器DTD120HA,無需更改原有程序,即可完成駕駛室控制柜與4組行車折臂和4組電動葫蘆限位器的點對點無線開關量信號傳輸功能,從而實現駕駛室無線操控行車與電動葫蘆各機組作業。
審核編輯 黃宇
-
無線通訊
+關注
關注
5文章
576瀏覽量
39890 -
控制柜
+關注
關注
4文章
161瀏覽量
15111
發布評論請先 登錄
相關推薦
控制柜與UL508A標準

plc控制柜操作流程_ PLC控制柜生產廠家 數字化工廠 尤勁恩
電氣控制柜接收什么來控制風機
國產PLC能否使用無線通訊終端來實現無線通訊?讓我們一探究竟

工業變頻控制柜的功能特點
工業機器人控制柜的組成有哪些
plc控制柜是什么功能
工業PLC控制柜的主要構成部分 控制柜代理廠商上海尤勁恩
工業PLC控制柜的四大作用 控制柜生產廠家找上海尤勁恩
工業PLC控制柜保養的五大關鍵步驟
PLC控制柜系統的制造工藝和選擇要點
控制柜糊了怎么辦?

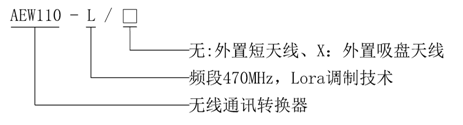
AEW110系列無線通訊轉換器
plc無線通訊模塊怎么用 plc無線通訊模塊怎么編程
無線通訊干擾源分析及解決辦法





 工商網監
工商網監
評論