") 結(jié)構(gòu)光三維測(cè)量幾種比較成熟的方法
結(jié)構(gòu)光三維測(cè)量幾種比較成熟的方法
1.飛行時(shí)間發(fā)
原理:通過直接測(cè)量光傳播的時(shí)間,確定物體的面型。發(fā)射脈沖信號(hào),接受發(fā)射回的光,計(jì)算距離。
精度:毫米級(jí)
優(yōu)點(diǎn):原理簡(jiǎn)單,可避免陰影和遮擋等問題,且儀器便攜化。
缺點(diǎn):精度相對(duì)較低
2.莫爾條紋法
原理:采用兩組光柵,一個(gè)主光柵,一個(gè)基準(zhǔn)光柵,通過基準(zhǔn)光柵來檢測(cè)輪廓表面的主光柵,并根據(jù)條紋規(guī)律來推算物體的輪廓面型。
優(yōu)點(diǎn):過程運(yùn)算量小,比較容易實(shí)現(xiàn)快速測(cè)量。
缺點(diǎn):?jiǎn)螐哪獱柕雀呔€不能判定物體凹凸,且光柵制作存在局限性,一般應(yīng)用于工業(yè)在線質(zhì)量檢測(cè)。
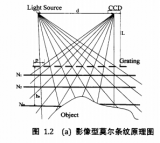
主要兩類:影像型莫爾條紋和投影型摩爾條紋
①影像型摩爾條紋
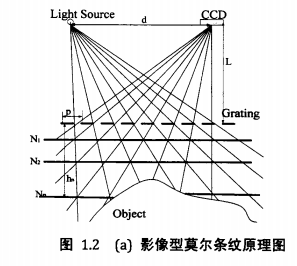
優(yōu)點(diǎn):測(cè)量精度高
缺點(diǎn):要求較大光柵面積,至少覆蓋待測(cè)輪廓,且光柵要緊挨待測(cè)物體
②投影莫爾法
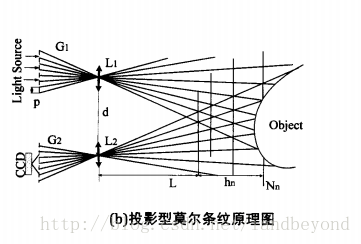
將一個(gè)光柵投射到被測(cè)物體上,旁邊使用另一個(gè)光柵觀測(cè)行程的摩爾條紋,分析觀測(cè)到的摩爾條紋,就可得到深度信息。
優(yōu)點(diǎn):適合測(cè)量較大物體。
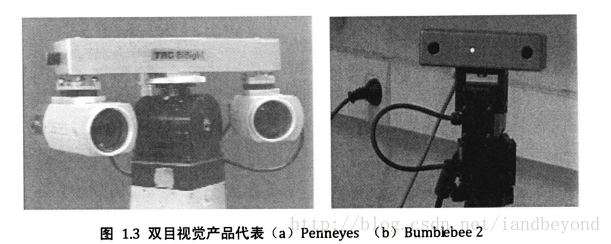
3.立體視覺法
原理:由多幅圖像(一般兩幅)來獲取物體三維幾何信息的方法。主要模仿生物,幾乎所有具備視覺的生物,都是兩個(gè)眼睛。利用成像設(shè)備從不同位置獲取被測(cè)物體的兩幅圖像,通過計(jì)算圖像對(duì)應(yīng)點(diǎn)間的位置偏差,來獲取物體的三維幾何信息。
優(yōu)點(diǎn):原理簡(jiǎn)單,對(duì)材質(zhì)顏色等物面性質(zhì)及背景光等環(huán)境因素要求較低,在超大型三維測(cè)量如建筑物測(cè)量中具有不可替代的優(yōu)勢(shì)。
缺點(diǎn):系統(tǒng)需要預(yù)先標(biāo)定,當(dāng)測(cè)量環(huán)境發(fā)生變化時(shí),相機(jī)參數(shù)需要重新調(diào)節(jié)。很難獲取無紋理區(qū)域的信息。
應(yīng)用:谷歌無人車
4.激光三角法
原理:線掃描法的一種,是用線光源投射到待測(cè)物體表面,然后經(jīng)過一側(cè)一維的掃描,獲得整個(gè)物體的深度信息。
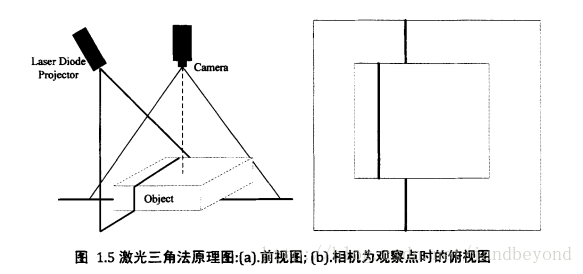
每次投射器投射一條光線到物體上,攝像機(jī)對(duì)帶有光條紋的物體成像,圖像上的光線特征恰恰對(duì)應(yīng)投射器的光線。根據(jù)三角測(cè)量原理,可確定落在物體上光線的深度信息。
優(yōu)點(diǎn):原理簡(jiǎn)單,精度較高,因?yàn)槭褂脝紊院玫募す馐沟眠@種方法很少受物體表面紋理的影響相對(duì)較穩(wěn)定,因此激光三角法在精度要求較高、環(huán)境較為復(fù)雜的工業(yè)檢測(cè)領(lǐng)域,應(yīng)用非常廣泛
缺點(diǎn):由于單幀圖像得到的信息非常有限,激光三角法還需要一次一維的移動(dòng)掃描,這也導(dǎo)致該方法效率較低。
5.結(jié)構(gòu)光技術(shù)
是一種主動(dòng)的三角測(cè)量技術(shù)。
原理:由光源投射可控制的光點(diǎn)、光條或光面結(jié)構(gòu),光在物體表面形成特征點(diǎn),線或者面,并由成像系統(tǒng)捕獲圖像,
得到特征點(diǎn)的投射角,然后根據(jù)標(biāo)定出的空間方向、位置參數(shù),利用三角法測(cè)量原理計(jì)算特征點(diǎn)與攝像機(jī)鏡頭主點(diǎn)
之間的距離。
幾種比較典型的編碼結(jié)構(gòu)光方式:
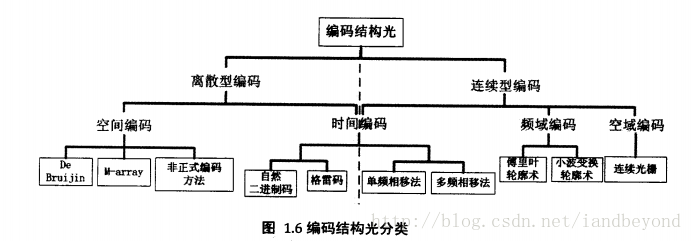
根據(jù)編碼圖案,將編碼結(jié)構(gòu)光分為了離散編碼和連續(xù)編碼兩大類。
如圖1.6所示。若沿著一行掃描編碼結(jié)構(gòu)光的數(shù)字投影條紋圖案,我們會(huì)發(fā)現(xiàn)離散編碼的圖案中,
碼字(codeword)相同的區(qū)域其掃描輪廓線的值也是一樣的,
而相同碼字區(qū)域的大小也很大程度上代表了重構(gòu)出來的三維點(diǎn)云的密度;
然而,在連續(xù)編碼圖案上,掃描輪廓線則為一條連續(xù)平滑的亮度曲線,在一個(gè)周期內(nèi)每個(gè)像素都有唯一的碼字,
正是如此,該方法才能夠獲得與圖像分辨率相當(dāng)?shù)狞c(diǎn)云密度。
而時(shí)間編碼則是使用同一個(gè)像素點(diǎn)不同時(shí)間下的多個(gè)碼字來確定該點(diǎn)的位置信息。
當(dāng)然,也有一些方法結(jié)合時(shí)間和空間策略共同確定位置信息。
離散型空間編碼方法大致可以分為三類:基于De aruijn的編碼方法,基于M.array的編碼方法,非正式的編碼方法。
離散型時(shí)間編碼方法主要代表有:自然二進(jìn)制編碼,Gray碼。
離散型編碼可以通過空間域或時(shí)間域進(jìn)行編碼實(shí)現(xiàn)。
空間編碼和時(shí)間編碼是通過碼字解碼的方式不同來區(qū)分的,空間編碼需要周圍相鄰碼字共同確定中心碼字的位置信息,
理論上講,連續(xù)性編碼方法既可以采用周期性模式,也可以采用非周期性模
式。然而非周期性模式往往限制了模板大小,目前圖像亮度等級(jí)有限,只有256
級(jí)的情況下,無法絕對(duì)唯一地標(biāo)識(shí)大范圍空間。因此,周期性模式圖像配合時(shí)間
域交叉技術(shù)獲得廣泛認(rèn)可。
連續(xù)性編碼方案中,最具有代表性的是相移輪廓術(shù)和傅里葉輪廓術(shù)。
①傅里葉變換輪廓術(shù)
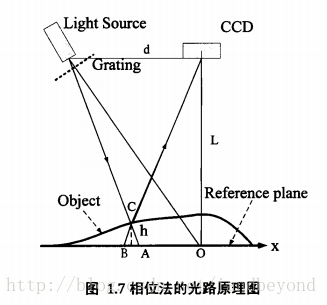
圖1.7所示。輪廓測(cè)量法利用數(shù)字濾波技術(shù),將頻率較高的載波和頻率較低的面形分離出來,然后進(jìn)行反變換,
得到包含高度信息的相位,在通過標(biāo)定得到的相位高度映射關(guān)系得到三維面型信息。傅里葉變換輪廓術(shù)只用一
幅圖就可以得到相位值測(cè)量面型信息,但該方法計(jì)算量大,使用FFT產(chǎn)生的泄漏、混頻、柵欄效應(yīng)等會(huì)產(chǎn)生誤差,
采用數(shù)字濾波器也需要不斷試錯(cuò)才能得到正確的參數(shù)。
②相位測(cè)量輪廓術(shù)
相位測(cè)量輪廓術(shù)(PMP:Phase Measurement Profilometry)的基本思想就是
通過3F(F為相移法中采用的頻率個(gè)數(shù))張具有一定相位差的條紋圖來計(jì)算相位,然后再結(jié)合相位-高度映射關(guān)系式
計(jì)算出物體的高度分布。
相位測(cè)量輪廓術(shù)的原理同樣如圖1.7所示,將正弦光柵圖像投影到物體表面,同時(shí)用成像設(shè)備采集變形條紋。
然后開始投影第二幀正弦光柵圖案,同時(shí)采集這一幀的變形條紋……整個(gè)過程重復(fù)Ⅳ次,而每一幀圖案相對(duì)前一幀
的相移為2,r/N。
典型的幾種算法被廣泛應(yīng)用于實(shí)際測(cè)量中,分別是三步相移法,四步相移法,五步相移法和六步相移法。
相比傅里葉輪廓術(shù),相位測(cè)量輪廓術(shù)運(yùn)算量要小很多,而且可以用查表法進(jìn)一步降低運(yùn)算量,這使得相位測(cè)量輪廓術(shù)在高速高精度實(shí)時(shí)三維測(cè)量中運(yùn)用的非常廣泛。
審核編輯:湯梓紅
-
濾波器
+關(guān)注
關(guān)注
160文章
7731瀏覽量
177700 -
光柵
+關(guān)注
關(guān)注
0文章
282瀏覽量
27481 -
編碼
+關(guān)注
關(guān)注
6文章
935瀏覽量
54765 -
三維測(cè)量
+關(guān)注
關(guān)注
0文章
21瀏覽量
6529 -
結(jié)構(gòu)光
+關(guān)注
關(guān)注
0文章
74瀏覽量
13221
原文標(biāo)題:【光電智造】結(jié)構(gòu)光三維測(cè)量幾種比較成熟的方法
文章出處:【微信號(hào):今日光電,微信公眾號(hào):今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
光學(xué)三維測(cè)量技術(shù)的各種實(shí)現(xiàn)方法及原理
常見的三維測(cè)量方法有哪些(結(jié)構(gòu)光編碼原理)

三維視覺測(cè)量技術(shù)知識(shí)科普
三維快速建模技術(shù)與三維掃描建模的應(yīng)用
SMARTSCAN三維掃描儀電子產(chǎn)品配件三維掃描服務(wù)
一種新的結(jié)構(gòu)光三維測(cè)量方法
結(jié)構(gòu)光三維測(cè)量中影響光條中心提取的若干因素及對(duì)策
三維掃描儀的工作原理
面向踝關(guān)節(jié)功能的三維測(cè)量與重建系統(tǒng)設(shè)計(jì)

智慧城市_實(shí)景三維|物業(yè)樓三維掃描案例分享_泰來三維

雙目三維光學(xué)測(cè)量硬件系統(tǒng)結(jié)構(gòu)設(shè)計(jì)

結(jié)構(gòu)光三維測(cè)量幾種比較成熟的方法分享
光學(xué)三維測(cè)量技術(shù)的原理是什么?
什么是結(jié)構(gòu)光?結(jié)構(gòu)光的測(cè)量原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論