") 卡爾曼濾波算法介紹
卡爾曼濾波算法介紹
2,可信度預(yù)測
講解卡爾曼濾波之前,先講一個故事。兩個釀酒師傅判斷當(dāng)前酒的度,一個老師傅,一個學(xué)徒。酒廠里酒的度數(shù),老師傅的判斷大多時候是更加準(zhǔn)確,而學(xué)徒大多時候的判斷誤差會大一些。一壇經(jīng)過10天發(fā)酵的酒,老師傅說是30度,學(xué)徒說是26度。但是這壇酒的實際度數(shù)是不知道的,那么我們怎樣知道一個相對準(zhǔn)確的結(jié)果呢?我們可以直接認(rèn)為老師傅的回答正確,但是 老師傅也會馬失前蹄,學(xué)徒也會有準(zhǔn)的時候 ,只是大多數(shù)時候誤差大一些。怎么得到相對可信度更高的結(jié)果呢。可以通過如下公式:
預(yù)測度數(shù)=K* 師傅預(yù)測+(1-K) * 學(xué)徒預(yù)測
來作為酒的度數(shù), K可以理解為對老師傅判斷的可信度,1-K可以認(rèn)為是對學(xué)徒判斷的可信度 。顯然讓K大一些,比如K=0.8,說明我們更相信師傅的判斷。隨著學(xué)徒技藝的熟練K變?yōu)榱?.6,那么那么對學(xué)徒判斷的權(quán)重增加了,對師傅判斷的可信度權(quán)重減小了。所以這個K很重要。
同樣的,從工程試驗中來說明,假設(shè)有兩個廠商的加速度傳感器A和B,汽車在跑,不斷的讀取A和B,每次會得到兩個值,那么該相信哪個傳感器的結(jié)果呢?傳感器測量出來的結(jié)果一定是有誤差的,不同廠商的傳感器誤差范圍不一樣,加上傳感器受到的環(huán)境的干擾等因素這樣也會干擾傳感器的測量結(jié)果。那么怎么得到更加可靠的結(jié)果呢?是不是和剛才的師傅判斷酒的度數(shù)很像?
假設(shè)A廠商的傳感器質(zhì)量好精度高,B廠商的誤差大,精度小,那么我們肯定更加相信A的測量結(jié)果。我們同樣  ,傳感器A
,傳感器A  ,傳感器B
,傳感器B  ,則:
,則:

綜合考慮傳感器A和傳感器B這就是兼聽則明。K越大說明越相信傳感器A測量的數(shù)據(jù) 。
如何選擇最優(yōu)的K,使上面得到的 可信度最高呢?這就需要卡爾曼濾波 。
3,卡爾曼濾波
下面這段是百度出來的卡爾曼濾波:
卡爾曼濾波(Kalman filtering)是一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計的算法 。由于觀測數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾的影響,所以最優(yōu)估計也可看作是濾波過程。
用土話來解釋就是測量系統(tǒng)的狀態(tài),由于有各種噪聲,會導(dǎo)致測量結(jié)果存在一定的誤差,那么如何降低這些誤差得到更加可信的數(shù)據(jù)呢,那么就是使用卡爾曼濾波做最優(yōu)估計。
卡爾曼濾波適用于線性系統(tǒng),并且系統(tǒng)的噪聲滿足高斯分布 (通常的工程過程噪聲都滿足)。
卡爾曼濾波是 以最小均方誤差為估計的最佳準(zhǔn)則 。也就是卡爾曼濾波定義的系統(tǒng)的最優(yōu)是讓估計結(jié)果的分布的方差最小的估計。
接下來引入卡爾曼濾波,首先引入 高斯分布或者叫正態(tài)分布 。
通常工業(yè)場景中許多測量和過程中的誤差都都滿足正態(tài)分布,所以傳感器的測量結(jié)果X=T+a,噪聲a滿足高斯分布,所以X也滿足高斯分布。
傳感器的測量結(jié)果X滿足高斯分布:

其中期望值是u,方差是****sigma(這個符號打不出來,就是上面分布中的值,后面都用sigma)
數(shù)學(xué)表達(dá)為:
坐標(biāo)圖為:

高斯分布
然后解釋卡爾曼濾波,還是以剛才的傳感器來說明,日常中各種噪聲,干擾都符合高斯分布。所以傳感器的測量結(jié)果也是符合高斯分布
傳感器A的測量 符合:
傳感器B的測量 符合:
其中a和b就是測量噪聲
預(yù)測加速度是: 。 概率論可以證明兩個高斯分布的線性組合也符合高斯分布 :
。 概率論可以證明兩個高斯分布的線性組合也符合高斯分布 :

所以預(yù)測 符合: 。當(dāng)K取不同值的時候得到的 u‘和sigma 也不同。那么 最優(yōu)估計是什么呢?剛才說了是讓方差最小。也就是當(dāng)取某個K的時候 sigma'最小的估計是最優(yōu)估計 。
。當(dāng)K取不同值的時候得到的 u‘和sigma 也不同。那么 最優(yōu)估計是什么呢?剛才說了是讓方差最小。也就是當(dāng)取某個K的時候 sigma'最小的估計是最優(yōu)估計 。

這是一個拋物線,可以證明當(dāng)  的時候,
的時候,
sigma'取最小值。將K帶入可以得到:

的時候 預(yù)測加速度X’也符合高斯分布,并且sigma' 取最小值。這個時候是最優(yōu)估計,可信度最高。
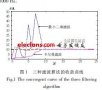
這就是卡爾曼濾波,我們畫圖如下:

卡爾曼濾波分布
可以看到 預(yù)測加速度X’ 更加的瘦高,所以這樣得到的估計更加的可信 。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50667瀏覽量
751947 -
卡爾曼濾波
+關(guān)注
關(guān)注
3文章
162瀏覽量
24635 -
高斯分布
+關(guān)注
關(guān)注
0文章
6瀏覽量
2743
發(fā)布評論請先 登錄
相關(guān)推薦
卡爾曼濾波算法
卡爾曼濾波簡介
卡爾曼濾波算法的改進(jìn)方案
卡爾曼濾波簡介及其實現(xiàn)(附C代碼)
擴(kuò)展卡爾曼濾波的原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論