 理一理AUTOSAR架構下的喚醒源事件
理一理AUTOSAR架構下的喚醒源事件
前言
最近的項目負責網絡管理部分,網路喚醒和ECU系統的休眠關系緊密,對系統的喚醒源事件感覺理解的不是很透徹,今天就來理一理AUTOSAR架構下的喚醒源事件。本文就先介紹AUTOSAR架構下EcuM模塊管理的喚醒源事件,然后介紹每一個和喚醒源相關的接口函數及其適用場景,然后回答以下幾個問題:
1.喚醒源有哪幾種狀態,每個狀態之間是怎么切換的?
2.喚醒源會影響系統的下電/休眠流程嗎?
3.斷電系統,喚醒后沒有Wakeup Sequences, 有 Wakeup validation sequence么?
正文
1.喚醒源狀態
EcuM模塊管理所有的喚醒源,每個喚醒源有四個狀態:ECUM_WKSTATUS_NONE,ECUM_WKSTATUS_PENDING,ECUM_WKSTATUS_VALIDATED, ECUM_WKSTATUS_EXPIRED。ECU上電后(復位后)每個喚醒源處于ECUM_WKSTATUS_NONE狀態。
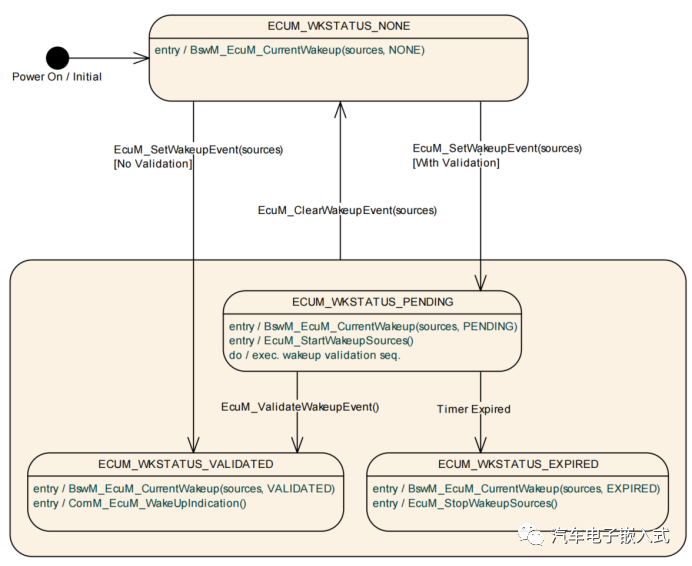
從上圖可以看出,喚醒源的每次狀態切換都需要通過BswM_EcuM_CurrentWakeup接口通知到BswM模塊。
ECUM_WKSTATUS_NONE切換到ECUM_WKSTATUS_PENDING或ECUM_WKSTATUS_VALIDATED狀態:
喚醒源事件可以通過底層的AUTOSAR標準模塊(如:Can Transceiver等)主動上報(需要配置Transceiver的喚醒源檢測功能),也可以通過手寫模塊來輪詢檢測上報(不配置AUTOSAR標準模塊的喚醒檢測功能,全部統一由手寫模塊來管理)。無論是配置還是手寫模塊,統一使用EcuM_SetWakeupEvent接口上報喚醒源事件,EcuM模塊根據該喚醒源是否配置了校驗切換喚醒狀態從ECUM_WKSTATUS_NONE切換到ECUM_WKSTATUS_PENDING或ECUM_WKSTATUS_VALIDATED狀態。
ECUM_WKSTATUS_PENDING狀態切換到ECUM_WKSTATUS_VALIDATED狀態:
背景知識1:本地(如IGN硬線)喚醒源喚醒一般不配置(在EcuM模塊中配置)喚醒源的校驗(Validation),遠程網絡(如Can喚醒)喚醒源一般配置喚醒源檢驗。CAN網絡喚醒需要配置CanTrcv和CanIf模塊,且一般配置只有收到NM網絡管理報文喚醒,也就是說,只有收到NM網絡管理報文后CanIf才會設置一個有效喚醒源的標志Flag,EcuM的輪詢檢測可以通過CanIf_CheckValidation讀取喚醒標致。
背景知識2:想分析喚醒事件是不是有效的總線喚醒源(網絡管理報文),需要Ecu有正常的收發報文能力,想要收發報文,Transceiver和Controller兩個模塊均需要啟動。一般來講,Transceiver會在程序初始化時進入正常的工作模式,而Controller進入正常的工作模式是EcuM調用EcuM_StartWakeupSources的結果,而該接口為Callout函數,內部功能自定義實現,一般在EcuM_StartWakeupSources中調用CanSM_StartWakeupSource,CanSM模塊會開啟Can Controller。也就是說,在EcuM模塊調用CanIf_CheckValidation校驗喚醒源事件前,需要先調用EcuM_StartWakeupSources。
EcuM的Mainfunction中會輪詢喚醒源狀態,在檢測到喚醒源狀態切換為ECUM_WKSTATUS_PENDING后就會開啟喚醒源狀態校驗: EcuM_MainFunction --> EcuM_CheckValidation --> CanIf_CheckValidation -->讀取網路喚醒源標志 --> 如果喚醒源標志置位則調用EcuM_ValidateWakeupEvent,喚醒源頭從ECUM_WKSTATUS_PENDING狀態切換到ECUM_WKSTATUS_VALIDATED狀態。
ECUM_WKSTATUS_PENDING狀態切換到ECUM_WKSTATUS_EXPIRED:
EcuM的Mainfunction在輪詢喚醒源狀態時并沒有檢測到有效的喚醒源(通過CanIf_CheckValidation并沒有讀取到有效的喚醒標志,比如通過應用報文喚醒ECU后設置了WakeupEvent),在ValidateWakeup timer超時(Expired)后就會切換喚醒轉到到ECUM_WKSTATUS_EXPIRED。
從其他狀態切換到ECUM_WKSTATUS_NONE:
系統中調用調用了EcuM_ClearWakeupEvent接口后,喚醒源狀態切換回ECUM_WKSTATUS_NONE。喚醒源的清除需要User去調用,如果是手寫模塊監控喚醒源的話,可以實時Set/Clear喚醒源,如果通過AUTOSAR標準模塊管理喚醒源的話,在系統滿足休眠條件前清除掉所有喚醒源,在進入Shutdown的判斷條件中加上喚醒源都不為Pending/Valid的條件。
2.喚醒源相關的接口函數
EcuM提供以下接口來獲取喚醒源專題:
· EcuM_GetPendingWakeupEvents
· EcuM_GetValidatedWakeupEvents
· EcuM_GetExpiredWakeupEvents
通過以下接口操作喚醒源的狀態:
· EcuM_ClearWakeupEvent
· EcuM_SetWakeupEvent
· EcuM_ValidateWakeupEvent
· EcuM_CheckWakeup
· EcuM_DisableWakeupSources
· EcuM_EnableWakeupSources
· EcuM_StartWakeupSources
· EcuM_StopWakeupSources
EcuM_GetPendingWakeupEvents
EcuM_GetValidatedWakeupEvents
EcuM_GetExpiredWakeupEvents
這三個接口用來獲取喚醒源的狀態,一般在BswM管理ECU狀態中會使用,也就是上文所說的在ECU進入Shutdown/Sleep狀態前會通過這幾個接口來判斷喚醒狀態是不是都已經為NONE狀態了。
EcuM_ClearWakeupEvent
EcuM_SetWakeupEvent
EcuM_ValidateWakeupEvent
這3個接口的分析見第2章節的分析
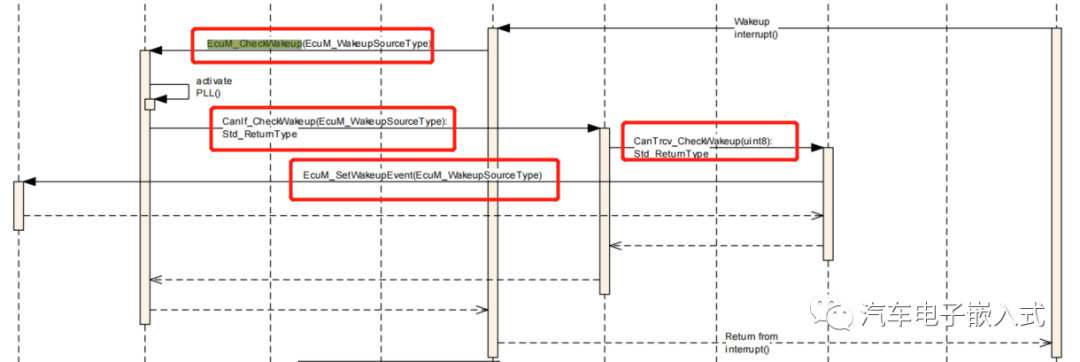
EcuM_CheckWakeup
這個接口為Callout函數,也就是內容由User自定義實現。這個函數只有深度休眠系統/EcuM走GoSleep Sequence才會用到,一般EcuM_CheckWakeup -> CanIf_CheckWakeup -> CanTrcv_CheckWakeup,CanTrcv_CheckWakeup函數中會檢測收發器(TJA1043)的STB和ERR引腳來判斷是否有總線喚醒事件,如果有的話嗎,CanTrcv_CheckWakeup調用EcuM_SetWakeupEvent上報喚醒事件。如果配置了Check Wakeup Timeout的話,在EcuM_CheckWakeup函數中調用EcuM_StartCheckWakeup,啟動相應WakeupSource的CheckWakeupTimer,如果喚醒源的檢查是異步完成的(CheckWakeupTimer),CheckWakeupTimer參數是EcuM延遲ECU關閉的時間的初始值,一般不配置CheckWakeupTimer。
EcuM_DisableWakeupSources
EcuM_EnableWakeupSources
這兩個接口為Callout函數,也就是內容由User自定義實現。這兩個函數只有深度休眠系統/EcuM走GoSleep Sequence才會調用到。深度休眠系統需要在下電前把喚醒引腳配置為中斷口,在休眠起來后把喚醒引腳的中斷屬性Disable,可以通過這兩個Callout函數實現。也就是在EcuM_EnableWakeupSources函數Enbale喚醒引腳的INT功能,在EcuM_DisableWakeupSources函數中Disable喚醒引腳的INT功能。
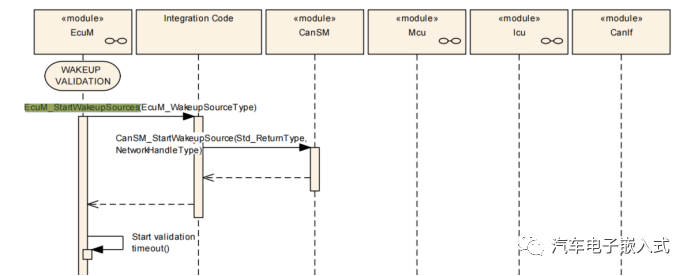
EcuM_StartWakeupSources
EcuM_StopWakeupSources
這兩個接口為Callout函數,也就是內容由User自定義實現。EcuM_Mainfunction在檢測到喚醒源事件由ECUM_WKSTATUS_NONE切換到ECUM_WKSTATUS_PENDING狀態時調用EcuM_StartWakeupSources。在EcuM_StartWakeupSources中一般判斷喚醒源是網絡喚醒源后調用CanSM_StartWakeupSource,CanSM最終會開啟Can Controller,這樣Can模塊就能正常接收報文,為后面的EcuM_CheckValidation校驗做好準備。EcuM_StartWakeupSources需要在EcuM_CheckValidation前調用,因為喚醒源校驗需要Can Controller能接收報文
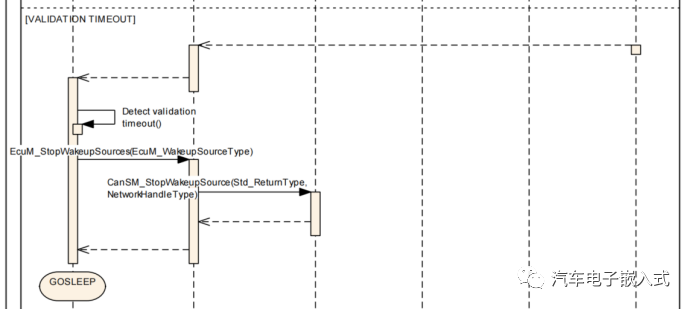
EcuM_Mainfunction在檢測到喚醒源事件由ECUM_WKSTATUS_PENDING切換到ECUM_WKSTATUS_EXPIED狀態時調用EcuM_StopWakeupSources。在EcuM_StopWakeupSources中一般判斷喚醒源是網絡喚醒源后調用CanSM_StopWakeupSource,CanSM最終會關閉Can Controller,這樣Can模塊就不能接收報文,為系統休眠做好準備。
3.問題回答
問題1:喚醒源有哪幾種狀態,每個狀態之間是怎么切換的?
答:喚醒源有ECUM_WKSTATUS_NONE, ECUM_WKSTATUS_PENDING, ECUM_WKSTATUS_VALIDATED, ECUM_WKSTATUS_EXPIRED四種狀態,具體切換參考第2節。
問題2:喚醒源會影響系統的下電/休眠流程嗎?
答:會。但是EcuM_Flex不會去check喚醒源的狀態,需要我們自己把喚醒狀態的條件加到ECU系統狀態切換條件中去。根具體的說,在調用EcuM_GoDown/EcuM_GoHal前需要判斷說有喚醒源是不是都已經NONE狀態了。
問題3:斷電系統,喚醒后沒有Wakeup Sequences, 有 Wakeup validation sequence么?
答:有。EcuM的Wakeup validation sequence和斷電系統或者深度休眠系統無關。
審核編輯:劉清
-
收發器
+關注
關注
10文章
3393瀏覽量
105860 -
AUTOSAR
+關注
關注
10文章
350瀏覽量
21472 -
狀態機
+關注
關注
2文章
492瀏覽量
27477 -
CAN模塊
+關注
關注
0文章
24瀏覽量
8740 -
ECU設計
+關注
關注
0文章
7瀏覽量
3292
原文標題:AUTOSAR 架構下EcuM喚醒源事件詳解
文章出處:【微信號:汽車電子嵌入式,微信公眾號:汽車電子嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AUTOSAR架構下的多核通信介紹

功能安全---AUTOSAR架構深度解析 精選資料分享
AUTOSAR架構深度解析 精選資料分享
STM32的核心Cortex-M3處理器是什么
STM32的核心Cortex-M3處理器的標準化是什么意思
Arm Cortex-R82處理器技術參考手冊
AUTOSAR架構下的WdgDriver WdgIf WdgM模塊
AUTOSAR是什么?AUTOSAR軟件架構簡介
基于Tricore芯片的AUTOSAR架構下的多核啟動

AUTOSAR架構自適應平臺
AUTOSAR架構下,持續集成CI的最佳實踐






 工商網監
工商網監
評論