 西門子與ABB機器人的Profibus-DP通訊實例
西門子與ABB機器人的Profibus-DP通訊實例
一,博途TIA的配置
在博途軟件中新建項目,本案例選取西門子S7-300PLC,其型號為CPU 313C-2DP,該PLC 為集成式的PLC,自帶PROFIBUS-DP口,可以作為主站也可以作為從站,在本案例中,PLC作為主站。
第一步:添加GSD文件。
在博途軟件里,依次點擊“選項”、“管理通用站描述文件”如下圖:
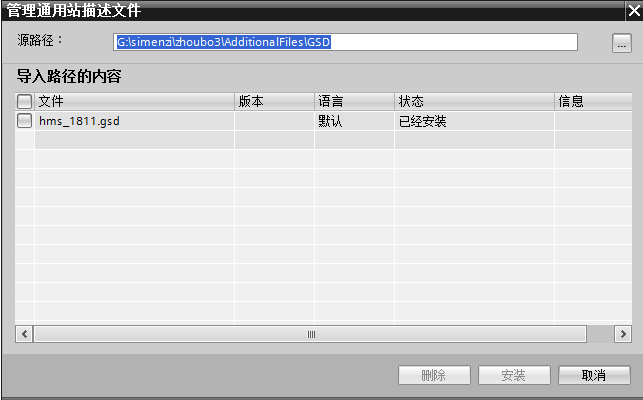
選中GSD文件,并點擊安裝,安裝因電腦而已,可能需要一點時間。
第二步:雙擊“設備組態”,并將視圖切換成網絡視圖,如下圖:

第三步:在右側“硬件目錄”功能欄里的搜索欄里輸入anybus,出現如下搜索結果:
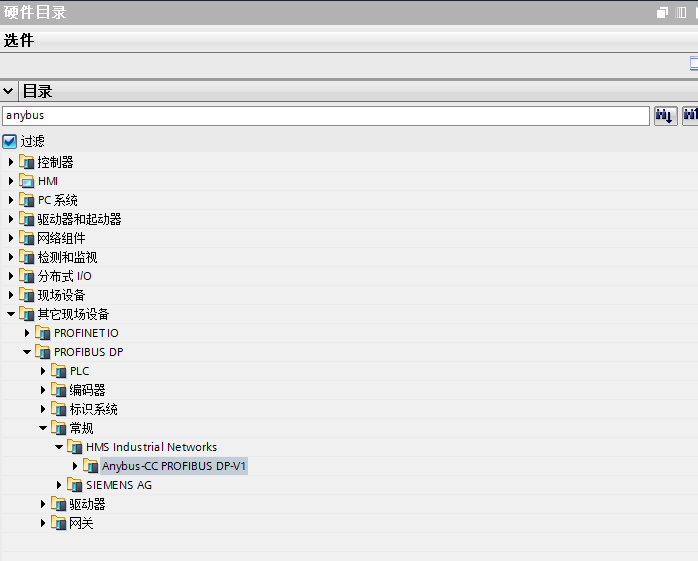
第四步:展開Anybus-CC PROFIBUS DP-V1,并按住鼠標左鍵,將其拖拽到網絡視圖中,如下圖:
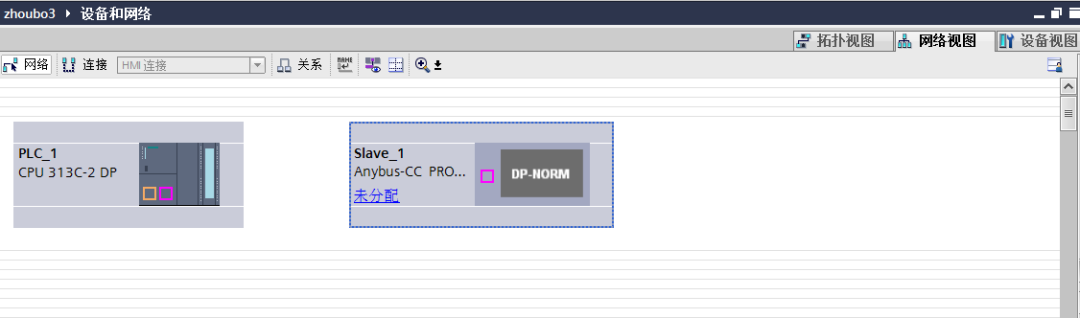
第五步:按住鼠標左鍵選中PLC_1的DP口,并與slave_1的DP口相連,如下圖所示:
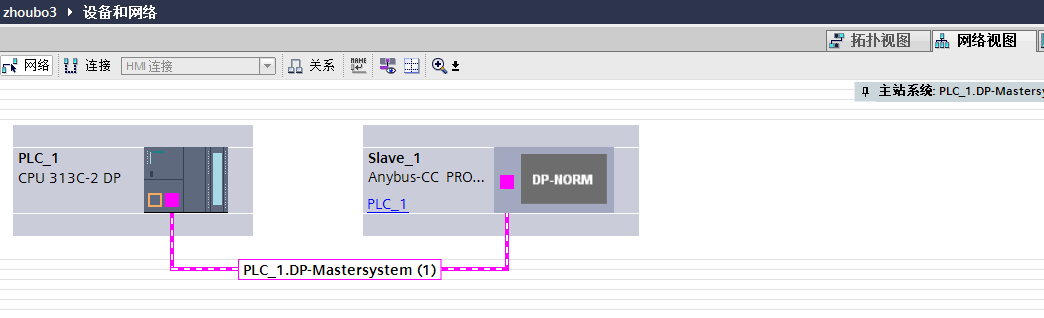
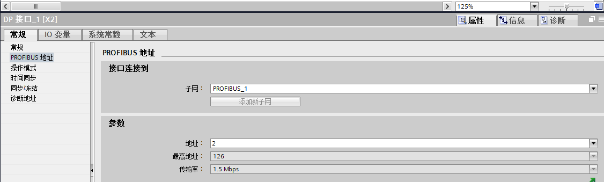
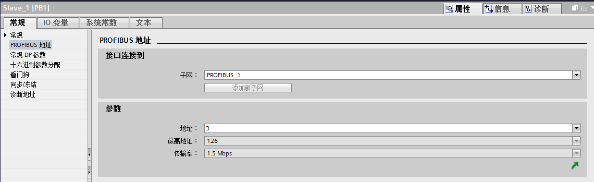
做到這里,PLC與機器人的硬件組態就已經結束,為了保證正確率,我們需要檢查主站與從站的地址,默認的情況下,PLC作為主站,其地址為2,Slave_1也就是機器人端默認的地址是3,如下所示:
二,機器人端設置
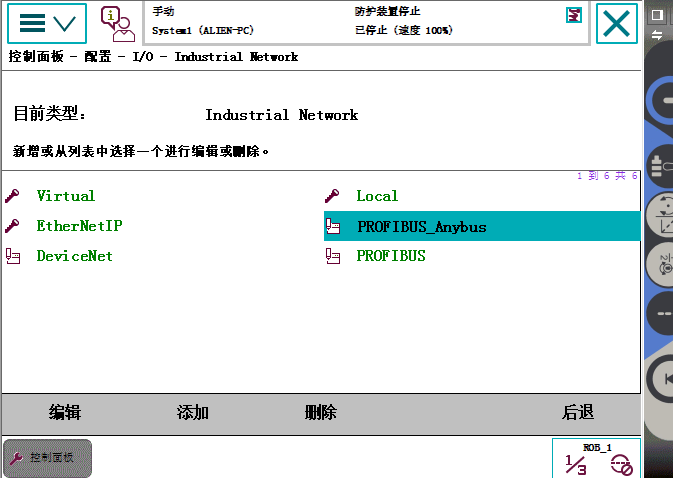
第一步:在示教器的“配置”菜單里,確保系統里支持Industrial Network,展開Industrial Network,并確保系統里存在PROFIBUS_Anybus,如下圖所示:
第二步:在“配置”菜單下,展開PROFIBUS Internal Anybus Device,如下圖所示:
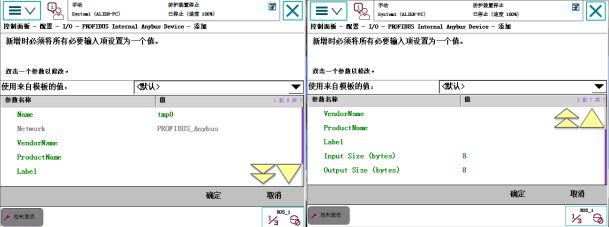
第三步:如果第二步里面出現了PB_Internal_Anybus,則無需添加,如果沒有出現,則添加,如下圖所示:

其中,Name位置填入名稱,Input Size(bytes)和Output Size(bytes)填入相應的通訊容量,其中最多支持512位,也就是64的字節。其余內容無需更改,添加完畢后,點擊確定。
三,PLC側通訊程序的編寫
PLC側的通訊程序較為簡單,只需要將對應的位值移動到相應的地址即可,在本案例中,PLC與機器人沒從通訊輸入輸出一個字節。
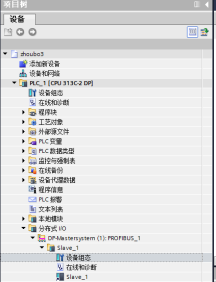
第一步:展開左側項目樹下的分布式I/O,依次展開,找到設備組態,并雙擊。如下圖:
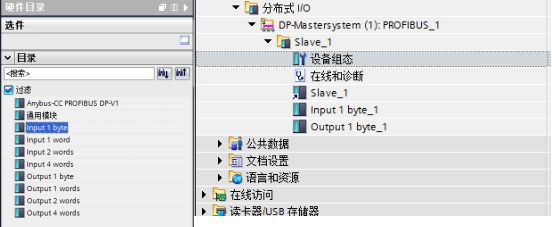
第二步:在右側的硬件目錄菜單欄,找到“Input 1 byte”和“Output 1 byte”,并分別雙擊,使之出現在左側的Slave_1下面,這一步的內容就是告訴PLC每次和機器人發送和接受是以一個字節為單位。如下圖所示:
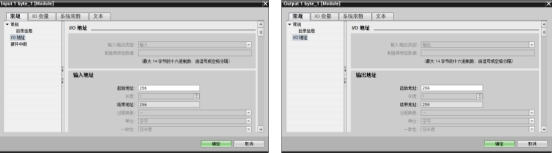
第三步:確定PLC的通訊地址,這一步至關重要,關系到程序里面的地址如何確定,分別選中“Input 1 byte”和“Output 1 byte”并右擊,選中“屬性”,這里采用各自的默認地址即可,如下所示:
做到這里,所有的配置已經設置完畢。
最后一步:在Main程序塊中添加如下的程序:
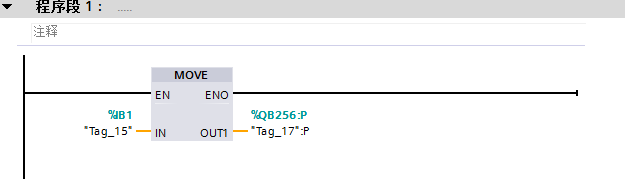
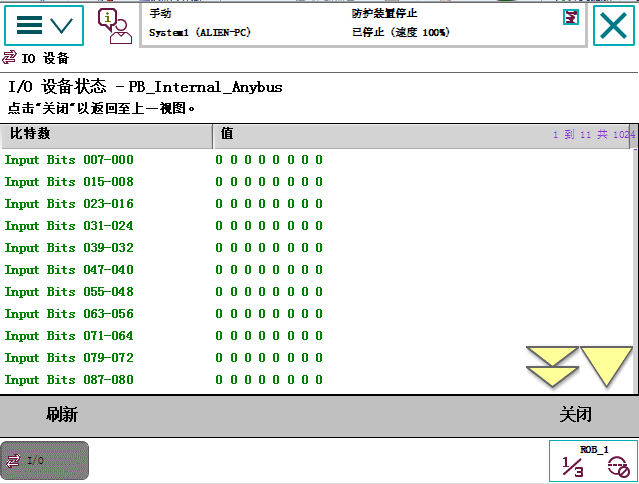
改程序代表將PLC將1通道的1.0-1.7一個字節的狀態值發送到256.0-256.7,其中256.0-256.7對應的就是機器人的接收端的第一個字節,我們可以在機器人示教器的IO監控界面里進行監控如下所示:
審核編輯:湯梓紅
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
plc
+關注
關注
5008文章
13167瀏覽量
462191 -
西門子
+關注
關注
94文章
3009瀏覽量
115664 -
PROFIBUS
+關注
關注
3文章
382瀏覽量
37788 -
S7-300
+關注
關注
8文章
225瀏覽量
34249
原文標題:原創干貨|西門子與ABB機器人基于Profibus-DP通訊
文章出處:【微信號:你身邊的機器人專家,微信公眾號:你身邊的機器人專家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
變頻器如何與西門子300PLC實現通訊實例
基于PROFIBU-DP的安川變頻器與西門子PLC的數據通訊

鋼鐵領域系統中串口轉Profibus-DP網關PM-160T的應用
西門子PLC與變頻設備的DP通訊介紹

西門子變頻器與S7-300/400 的PROFIBUS-DP通訊過程
西門子1200PLC和ABB/ACS510變頻器的PROFIBUS DP通訊

FANUC機器人與SIEMENS PLC的PROFIBUS-DP通訊技術分析






 工商網監
工商網監
評論