") KUKA機(jī)器人的初始化運(yùn)行
KUKA機(jī)器人的初始化運(yùn)行
KUKA 機(jī)器人的初始化運(yùn)行稱為 BCO 運(yùn)行。
BCO 是 B lock coincidence (即程序段重合)的縮寫。重合意為 “ 一致 ” 及 “ 時間 / 空間事件的會合 ”。
在下列情況下要進(jìn)行 BCO 運(yùn)行:
? 選擇程序 (例 1)
? 程序復(fù)位: 復(fù)位 (例 1)
? 程序執(zhí)行時手動移動 (例 1)
? 更改程序 (例 2)
? 語句行選擇 (例 3)
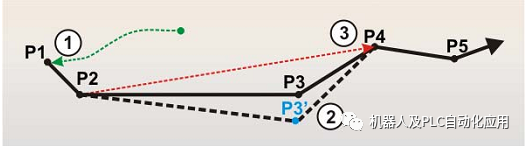
BCO 運(yùn)行執(zhí)行舉例
1 選定程序或程序復(fù)位后 BCO 運(yùn)行至原始位置
2 更改了運(yùn)動指令后執(zhí)行 BCO 運(yùn)行 刪除、示教了點后
3 進(jìn)行了語句行選擇后執(zhí)行 BCO 運(yùn)行
BCO 運(yùn)行的原因 :
為了使當(dāng)前的機(jī)器人位置與機(jī)器人程序中的當(dāng)前點位置保持一致,必須執(zhí)行 BCO 運(yùn)行。
僅當(dāng)當(dāng)前的機(jī)器人位置與編程設(shè)定的位置相同時才可進(jìn)行軌跡規(guī)劃。因此,首先必須將 TCP 置于軌跡上。
在選擇或者復(fù)位程序后 BCO 運(yùn)行至 Home 位置
相關(guān)系統(tǒng)變量
$ON_PATH 在軌跡上
用于監(jiān)視編程路徑的信號聲明
BCO運(yùn)行后設(shè)置此輸出。因此,機(jī)器人控制器會與上級控制器通信,使機(jī)器人位于編程路徑上,只有當(dāng)機(jī)器人離開路徑,程序被復(fù)位或執(zhí)行塊選擇時,輸出才再次復(fù)位。
VW標(biāo)準(zhǔn)設(shè)置 :SIGNAL $ON_PATH $OUT[4040]
$MOVE_BCO
指示當(dāng)前是否正在執(zhí)行BCO運(yùn)行
$MOVE_BCO=State
true:正在進(jìn)行BCO運(yùn)行。
false:不進(jìn)行BCO運(yùn)行。
責(zé)任編輯:彭菁
-
編程
+關(guān)注
關(guān)注
88文章
3592瀏覽量
93596 -
程序
+關(guān)注
關(guān)注
116文章
3777瀏覽量
80851 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
143瀏覽量
9054
原文標(biāo)題:BCO 運(yùn)行
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
KUKA重型機(jī)器人
工業(yè)機(jī)器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
KUKA機(jī)器人問題解答
庫卡KUKA機(jī)器人四種啟動方式介紹
KUKA庫卡機(jī)器人伺服驅(qū)動器相關(guān)型號舉例
KUKA焊接機(jī)器人伺服電機(jī)常見故障及維修處理
工業(yè)機(jī)器人組成結(jié)構(gòu)相關(guān)資料分享
庫卡機(jī)器人MGV電源模塊維修
KUKA機(jī)器人伺服驅(qū)動模塊維修
沒有有前輩用LabVIEW控制kuka機(jī)器人c2的經(jīng)驗?通訊是怎么做到的?
KUKA機(jī)器人的初始化運(yùn)行原因
KUKA機(jī)器人的初始化運(yùn)行稱為BCO運(yùn)行





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論