 CAN總線通信協議是什么
CAN總線通信協議是什么
CAN總線
CAN 是Controller Area Network
的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在汽車產業中,出于對安全性、舒適性、方便性、低功耗、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。
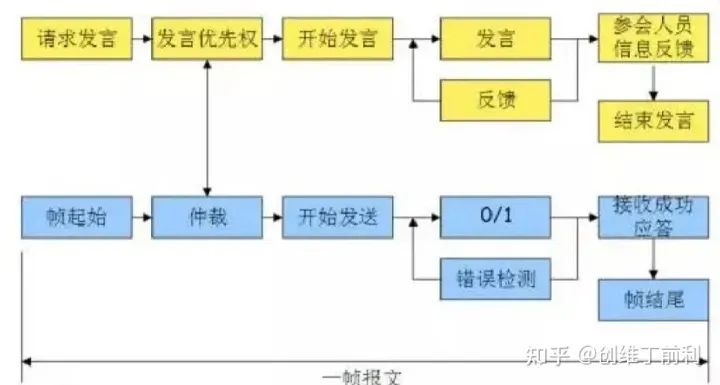
總結下,當一個節點要向其它節點發送數據時,該節點的CPU將要發送的數據和自己的標識符傳送給本節點的CAN芯片,并處于準備狀態;當它收到總線分配時,轉為發送報文狀態。CAN 芯片將數據根據協議組織成一定的報文格式發出,這時, 網上的其它節點處于接收狀態。每個處于接收狀態的節點對接收到的報文進行檢測,判斷這些報文是否是發給自己的,以確定是否接收它。
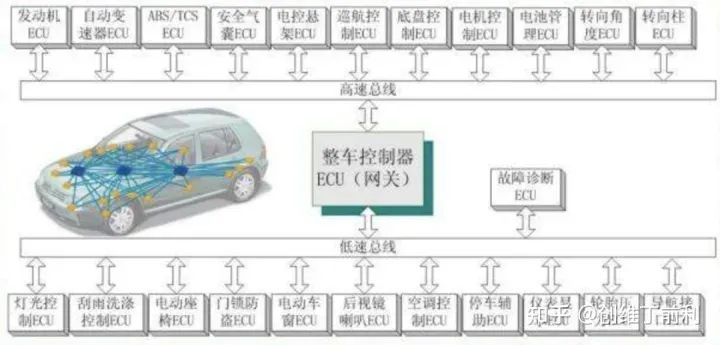
CAN總線結構圖CAN總線的優點很多:通信速率最高可達1MB/s(此時距離最長40m)。節點數實際可達110個。采用短幀結構,每一幀的有效字節數為8個。每幀信息都有CRC校驗及其他檢錯措施,數據出錯率極低。通信介質可采用雙絞線,同軸電纜和光導纖維,一般采用廉價的雙絞線即可,無特殊要求。節點在錯誤嚴重的情況下,具有自動關閉總線的功能,切斷它與總線的聯系,以使總線上的其他操作不受影響。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
汽車電子
+關注
關注
3024文章
7868瀏覽量
166497 -
CAN
+關注
關注
57文章
2715瀏覽量
463373 -
總線
+關注
關注
10文章
2866瀏覽量
87985
發布評論請先 登錄
相關推薦
CAN總線通信協議的基礎知識
本文將介紹CAN總線通信協議的基礎知識,目前的內容僅為通用的協議部分,暫不涉及具體的外設模塊的用法。研究通信協議的具體內容,主要是看建立

CAN總線通信協議模型概述 CAN總線通信模型作用
必須是相同的。? 傳輸層描述了 CAN 總線協議的內核,它負責位時序(bit timing)、同步、仲裁、應答、錯誤探測等。? 對象層負責報文的過濾、狀態和控制。? 應用層完成用戶指定的數據傳輸任務。
發表于 12-14 14:17
基于CAN總線通信協議的設計與實現
本文以 C8051F120 單片機為背景,在CAN V2.0 技術規范的基礎上提出了一種基于單片機的CAN 應用層協議。文中首先設計了一種數據傳遞格式,它解決了CAN V2.0 規范只
發表于 06-17 07:49
?48次下載


結合Motorola控制器芯片的CAN總線通信研究
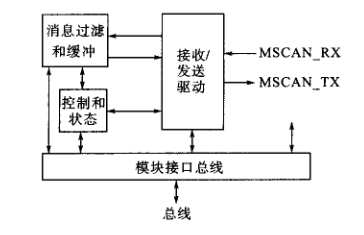
文章介紹了CAN總線通信協議和Motorola新一代嵌入式控制器DSP56F805內置的用于實現CAN通信的MSCAN模塊,并通過編程實例說
發表于 03-15 16:24
?15次下載
速銳得解碼本田雅閣混動版整車網關CAN總線通信協議DBC控制策略
本田雅閣混動的整車控制器將物理擋位發送給儀表ECU將處理之后的實際擋位發送給BCM,倒車雷達等ECU供相關動作執行;如果駕駛請求擋位(輸入擋位)和VCU處理后的實際擋位不一致,則發送報警信號到儀表,D檔和S檔可直接切換
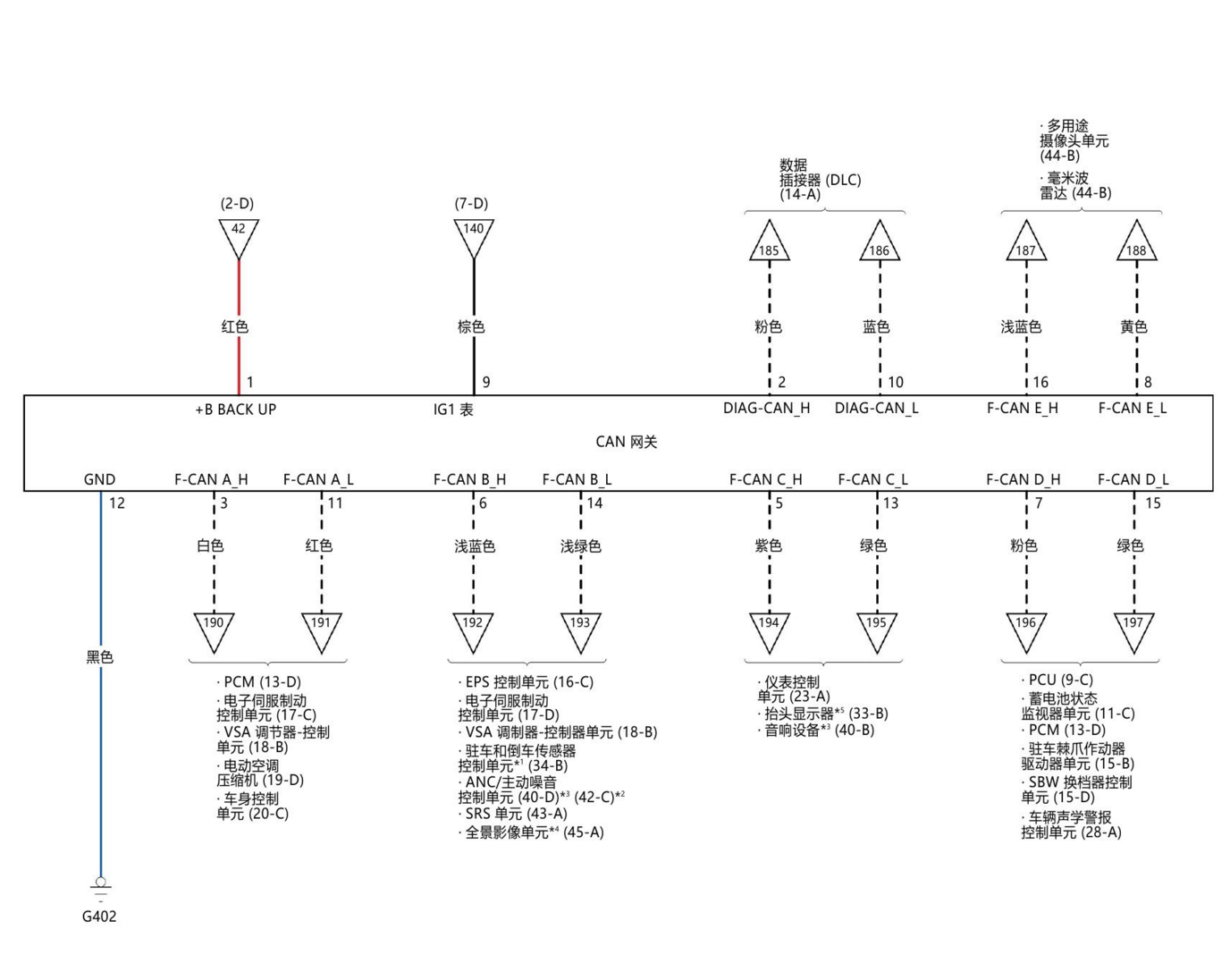
速銳得解碼本田雅閣混動版整車網關CAN總線通信協議DBC控制策略
近期,應本田的本田安全駕駛中心研發周總監的邀請,需要速銳得針對新款本田雅閣混動版整車網關CAN總線通信協議采集DBC,主要解決幾個問題:1、解決車輛報故障問題、2、解決檔位邏輯問題、3、剎車行程、方向盤轉向角度、行駛狀態下檔位D
全面的CANopen開發工具—CANopen軟件協議棧
CANopen是一種用于CAN總線的通信協議,它定義了一組標準通信對象和通信服務,使得不同設備之間可以進行
發表于 07-17 08:56
?953次閱讀

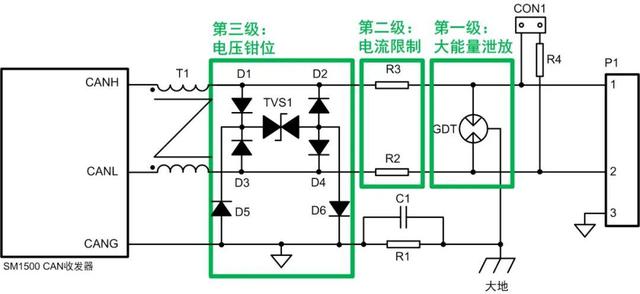
can總線的通信協議有哪些 CAN接口保護及工作原理
CAN總線(Controller Area Network)是一種廣泛應用于汽車、工業自動化和其他領域的串行通信協議。以下是幾種常見的CAN總線





 工商網監
工商網監
評論