 無人機高光譜影像在樹種分類識別中的應用研究
無人機高光譜影像在樹種分類識別中的應用研究
引言
相比常規的實地勘測,無人機高光譜影像能夠有效提升林業生態系統監測效率。近年來,部分學者嘗試在森林樹種分類中使用高光譜數據和激光雷達,取得了較為理想的效果,但是在研究中需要投入較高的成本,一定程度上限制了其應用前景。而高光譜影像不但能夠完成植被信息的有效挖掘, 還擁有低成本、高效率、高空間分辨率、操作方便等優點 。
2、研究區數據及預處理
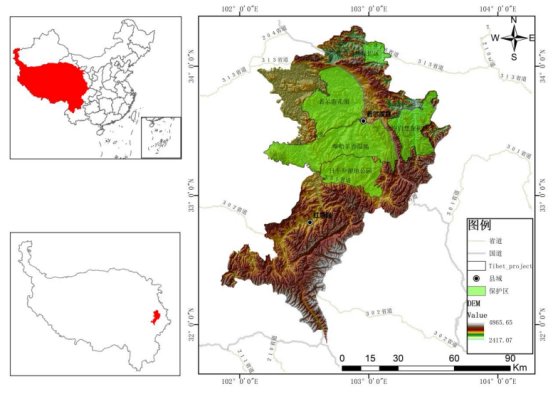
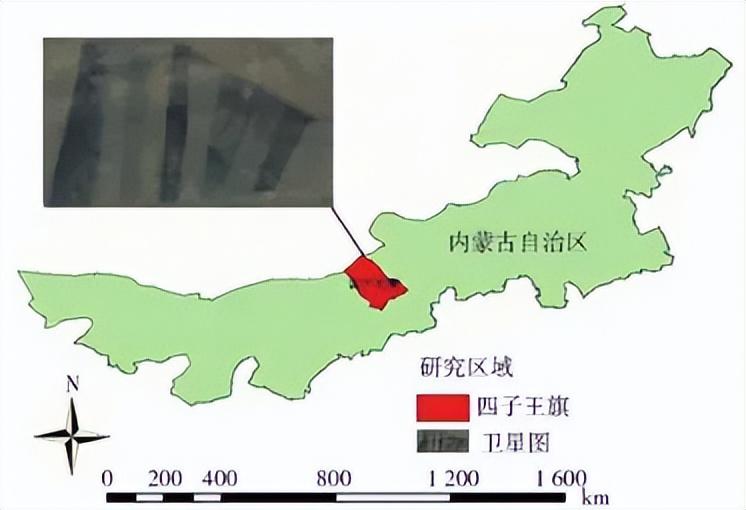
2.1 研究區概述
研究區種植的主要是防風固沙林,結合當地的適生植物類型和地理條件,在當地采取了喬木、灌木和草類相結合的林分形式。出于保護耕地和固定沙地的目的,在道路兩旁種植了混合闊葉林和榆樹林,其擁有草本層、灌木層、喬木層的垂直結構,研究區總面積約451km2。研究區屬于暖溫帶大陸性干旱荒漠氣候,擁有300 m~500m的海拔以及平坦的地勢,喬木樹種主要為梭梭、胡楊、沙棗、新疆楊、榆樹等,林下植被主要為雜灌。在本次研究中筆者將以沙棗、胡楊、新疆楊、榆樹作為研究對象。
2.2獲取高光譜數據
獲取影像,設置200m的無人機飛行高度。為了使相機參數需求、飛行高度需求以及影像高分辨率需求得到有效滿足,在本次研究中將進行42個波段的設置,這些波段擁有10nm左右的間隔,設置82%的航向重疊率、80%的旁向重疊率以及0.12 m的空間分辨率,同時完成4塊地面輻射標靶的設置,分別擁有3%、22%、48%、64%的反射率,從而為后期校正影像輻射提供便利。
2.3調查地面數據
要想使高光譜影像更加準確地標注樣本數據,就需要調查研究區的實際情況,與研究區林分的實際情況相結合。本次研究中在研究區內選取了3個典型區域作為研究樣本。調查時間為獲取影像的兩天前, 在開展采樣工作時采樣點的位置信息是通過便攜式GPS設備完成記錄的,在各個樣地中完成單棵樹木樹種情況的記錄。在完成調查工作后,在 Excel 中記錄和整理原始數據,在采樣工作中共完成 40個樣本點樹種類型數據的獲取。樹種主要為胡楊、榆樹、沙棗、新疆楊等。
3、研究方法
首先,有效地處理高光譜影像,并且建立分類特征集,利用SVM-RFE算法完成原始波段最佳組合的選取,再與數理統計特征、紋理特征、植被指數相結合完成新影像分類特征的構建。其次,合理利用 RF算法分析各個特征的重要性,在充分考慮分類精度的基礎上,將重要性靠后的特征排除。最后,完成 4 種分類方案的構建,并且評價影像分類的精度,完成不同分類器分類效果的對比。
3.1原始最佳波段組合選擇
當存在不同的樹種樣本數量和較少的訓練樣本時,分類器的精確性會降低。要想有效避免這種問題,需要深入挖掘高光譜影像的特征。在這個過程中 最佳指數因子選擇法(OIF)得到了較為廣泛的應用, 這種算法能夠對各波段間的相關性和單波段影像信息量進行綜合考慮,與波段選擇原則相貼合,能夠取得較為準確的計算效果 。但是在本次研究中筆者將嘗試使用SVM-RFE算法完成原始最佳波段組合選擇,其主要原理就是通過同一模型完成多次訓練,并且在每次訓練中將權重較低的特征移除,再與新的特征相結合完成后續訓練,直至對選擇的特征足夠滿意為止。
3.2構建植被指數特征
高光譜影像除了包括連續的地物光譜信息外,其中的地物空間分布信息也非常豐富,若是在樹種分類時只以光譜信息作為特征,很難準確地分析高光譜圖像。在本次研究中筆者將通過構建灰度共生矩陣,在空間信息中融入紋理特征,從而使高光譜影像的空間特征得到準確體現。
3.3優化分類特征
優化分類特征就是選擇擁有較高重要性的特征變量。在訓練過程中從未使用過的樣本被稱為帶外 (OOB)數據,有效利用這類數據能夠準確計算特征變量的重要性,評價分類結果的精度。在本次研究中筆者將通過樹數量的改變開展反復實驗,在實驗中完成特征重要性得分的記錄,然后根據分類總體精度將冗余的特征變量去除。
研究結果
4.1原始最佳波段組合
這一階段的研究對象為研究區內的優勢樹種,分別使用上文提到的SVM-RFE算法和OIF法選擇原始最佳波段組合。在完成預處理后,無人機擁有42個波段的高光譜數據,完成所有波段組合OIF指數的計算,選擇指數較大的波段組合20個,具體情況如表 1 所示。
表1 OIF指數排名
在本研究的原始波段組合中選取OIF值在前20的波段組合,分別選擇了1、2、3、4、5、6、35、36、37、38、42 序號的波段共 11個。在選擇原始最佳波段組合時利用 OIF 算法需要較長的計算時間并且擁有較高的計算難度。通過分析表1可知,有兩極分化的情況存在于選擇波段中,具體在近紅外波段和藍光波段較為集中,并未選擇紅色波段和綠色波段,導致大量原始信息丟失。
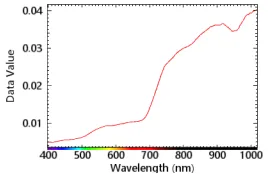
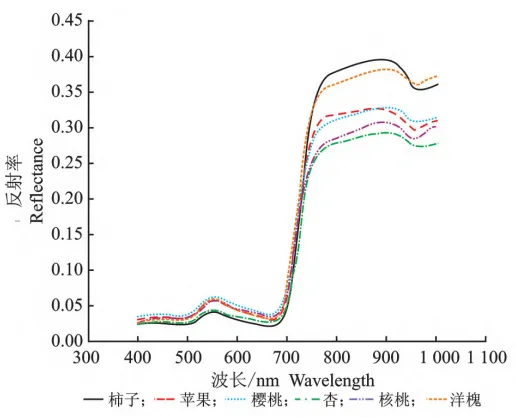
而利用SVM-RFE算法能夠選擇17個原始波段,有效地組合所選的波段,分別選擇了1、2、3、8、11、13、17、20、21、23、26、28、31、35、36、40、42序號的波段。這種方法能夠在整個范圍內有效地選擇波段,不但擁有更加均勻的波段選擇,并且還擁有相對較小的計算量。對比原始42個波段榆樹光譜響應曲線和上述兩種方法選擇的榆樹光譜響應曲線,得到如圖1所示的結果。
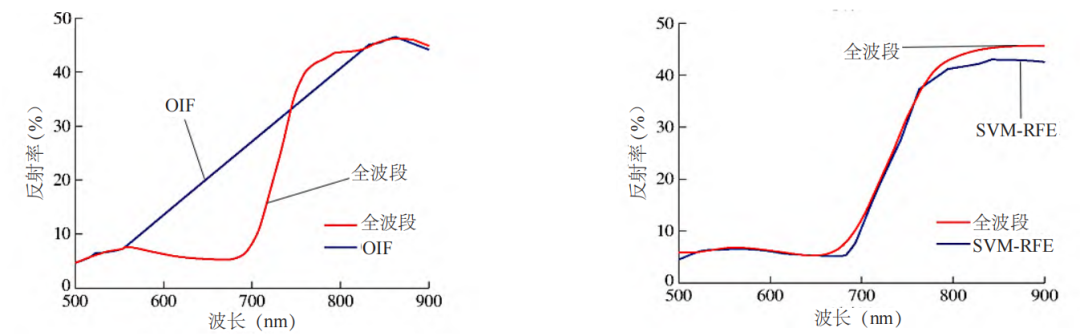
圖1榆樹光譜響應曲線對比
通過分析圖1可以發現,在榆樹光譜響應曲線方面,與原始42波段相比,SVM-RFE算法選擇的波段特征組合只存在較小的差異,擁有較好的曲線擬合情況,使原始光譜特征得到了較大程度的保留。結合兩種方法選取的最佳波段組合,得出了如表2所示的分類結果。
表2對比原始階段選擇分類結果

與原始全波段相比,OIF法選取的原始波段組合明顯擁有更低的Kappa系數和總體分類精度;與原始全波段相比,SVM-RFE算法幾乎擁有相同的Kappa系數和總體分類精度。所以在選擇高光譜數據原始最佳波段組合時應該使用SVM-RFE算法。
4.2分析特征變量重要性和選擇特征
通過分析隨機森林的OOB誤差可以明確分布特征變量重要性的情況,具體情況如圖 2 所示。
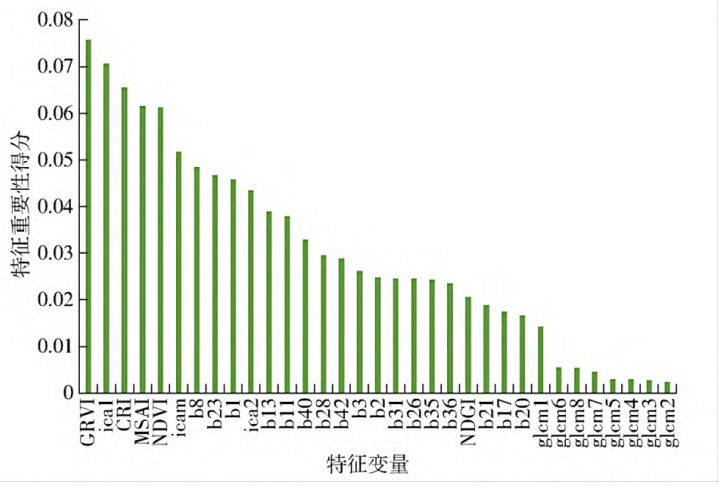
圖2特征變量重要性得分
得分越高證明這一特征越重要,這一變量就能在越大程度上幫助和影響分類結果。通過決策樹數量的改變可以 發現當擁有2000決策樹數量時,基本不會改變特征變量的重要性排序。所以,以2000RF決策樹數量的 結果作為分析特征重要性的結果。
由圖2可知,數理統計特征和植被指數特征都擁有較高的重要性得分, 其中重要性排名第一的是綠色比值植被指數,這是因 為研究區大部分樹種都是榆樹,同時樹木擁有良好的生長情況,包含較高的葉綠素含量,所以在近紅外波段擁有較高的反射率。其他數理統計特征和植被指數特征均排在前20%,說明在樹種分類中使用筆者構建的植被指數特征能夠獲得非常準確的分類結果。因為在本次研究中使用獨立主成分分析的前3個主成分作為數理統計特征,其信息量達到了原數據的95%以上,所以擁有較高的重要性得分。紋理特征普遍擁有較低的重要性,出現這種現象可能是由于在分析主成分后,對于排名較低的紋理特征來說,其只包含較少的原始數據信息。在RF分類器中由高到低分別輸入特征的重要性排序和數量,并且完成混淆矩陣的建立,分析與評價分類結 果,以Kappa系數和總體分類精度為評價指標。結果證明,在1~11 特征變量數中分類精度得到了明顯提升,Kappa系數為0.93,分類總體精度為94.73%。在11特征變量數以后正在緩慢提升分類精度,但是提升幅度較小。在28個波段時其擁有最高的分類精度,Kappa 系數為 0.9475,分類總體精度為95.53%。在融入紋理特征后,會緩慢降低分類精度,證明在擁有過多的特征變量后,可能導致數據中出現過擬合和冗余的現象,最終決定在分類器中輸入重要性排名前 85%的特征變量。
4.3對比不同分類器分類效果
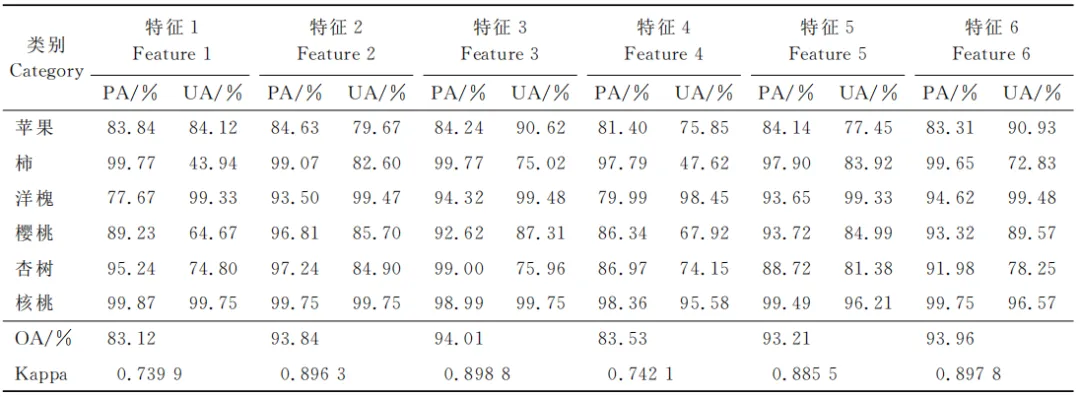
本次研究使用的優選特征為28個,在訓練樣本相同的情況下,樹種分類分別利用RF、SVM以及MLC分類器。通過分析分類結果可以發現,3種分類器在樹種分類的過程中都存在一定程度的錯分和混分問題。其中,擁有最低分類精度的樹種為沙棗,特別是在SVM和MLC 中存在比較多的沙棗和榆樹混分現象。可能是由于研究區內只存在較少數量的沙棗,其擁有較多的側斜枝和較大的樹冠,導致其在圖 像中擁有較強的光譜信息。當與榆樹混合種植時,二者將擁有相似的光譜特征,導致分類難度提升,進而出現較多的榆樹與沙棗混分現象。在紋理、光譜特征方面,長勢旺盛的胡楊和新疆楊之間的差異較小,分辨難度較高,所以有輕微的混分現象在兩者之間存在。研究區被低矮的棉花田包圍,其在圖像中只擁有較弱的光譜信息,與研究區中灌木的差異較小,所以也存在少量的灌木和棉花田混分現象。
出于對研究區總體效應的考慮,在種植過程中會混合種植灌木與特定的樹木,所以在研究區中有大量 的灌木,導致樹種精細分類的難度進一步提升。另外,本次研究是在深秋季節采集高光譜影像,很多植被已經存在枯萎的情況,在高光譜影像中并沒有識別出所有已經死亡或枯萎的沙棗和胡楊,對制圖精度產生了不良影響。在3種算法中都有椒鹽噪聲存在,只是其程度存在差異,這種現象存在是由于本次研究中使用的傳感器擁有較高的空間分辨率。本次研究結果表明,RF分類器擁有最高的分類精度,可以達到95.93% 的總體分類精度;MLC分類器擁有最低的分類精度,只能夠達到 88.70% 的總體 分類精度。相比于SVM分類器,RF分類器提高了1.32%的總體精度,0.0241的Kappa系數;相比于MLC分類器,RF分類器提高了6.83%的總體精度,0.0967的Kappa系數。研究區內大部分樹種都能夠達到 80% 以上的UA和PA。對單個樹種的分類精度進行分析,相比于MLC分類器,RF分類器能夠使榆樹和白楊錯分和漏分的概率得到有效降低;相比于SVM分類器,RF分類器能夠使沙棗和胡楊錯分和漏分的概率得到有效降低,較高的UA和PA使這一結論得到證實。本次研究結果表明,與僅利用光譜特征分類相比,在分類特征中融入數理統計特征、植被指數特征以及紋理特征,能夠使單個樹種的分類精度得到極大程度的提升。優化特征后,能夠提升0.39%的分類總體精度和0.065的Kappa系數,雖然沒有大幅度提 升分類精度,但是卻明顯提升了數據處理的效率,并且明確了研究區樹種分類特征。相比于SVM和MLC分類器,RF分類器擁有更好的分類效果和更高的分類精度,能夠有效地適用于研究區樹種分類。
4.4影像分類后處理
最終本次研究在訓練樣本相同的情況下,利用28個優選特征和RF分類器開展樹種分類。進行圖像分類后處理,對于較小的圖斑和椒鹽噪聲使用中值濾波器進行處理,取得了較好的效果;對于圖像中存在的虛假像元問題使用過濾處理、聚類處理等方法解決,發揮了較好的效果。研究結果表明,在經過有效處理后,能夠提升0.012的 Kappa系數和1.01%的分類總體精度,能夠有效增強分類效果。
結束語
綜上所述,在樹種分類識別中應用無人機高光譜影像能夠取得非常準確的分類識別結果,但是在應用過程中相關人員需要注意合理地利用各種設備和技術,能夠在一定程度上提升分類的準確度。
推薦:
便攜式地物光譜儀iSpecField-NIR/WNIR
專門用于野外遙感測量、土壤環境、礦物地質勘探等領域的最新明星產品,由于其操作靈活、便攜方便、光譜測試速度快、光譜數據準確是一款真正意義上便攜式地物光譜儀。

無人機機載高光譜成像系統iSpecHyper-VM100
一款基于小型多旋翼無人機機載高光譜成像系統,該系統由高光譜成像相機、穩定云臺、機載控制與數據采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統通過獨特的內置式或外部掃描和穩定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

便攜式高光譜成像系統iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫學醫療、精準農業、礦物地質勘探等領域的最新產品,主要優勢具有體積小、幀率高、高光譜分辨率高、高像質等性價比特點采用了透射光柵內推掃原理高光譜成像,系統集成高性能數據采集與分析處理系統,高速USB3.0接口傳輸,全靶面高成像質量光學設計,物鏡接口為標準C-Mount,可根據用戶需求更換物鏡。

審核編輯 黃宇
-
無人機
+關注
關注
228文章
10344瀏覽量
179643 -
高光譜
+關注
關注
0文章
327瀏覽量
9917
發布評論請先 登錄
相關推薦
無人機機載高光譜成像系統的應用及優勢
基于無人機高光譜謠感的蘊地退化指示物種的識別
基于無人機高光譜的荒漠草原地表微斑塊分類研究

基于無人機高光譜遙感的荒漠化草原地物分類研究2.0
基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
高光譜成像系統:深度學習機載高光譜影像樹種分類研究
第一集 知語科技無人機反制技術與應用--無人機的定義與分類
如何利用無人機高光譜影像技術進行深海生物調查與監測?
農作物生長監測中,無人機高光譜影像如何識別病蟲害和缺素情況?

無人機高光譜影像在地質勘探中的應用

無人機高光譜影像是否真的可以提升農業生產效率?






 工商網監
工商網監
評論