 STM32 TIM—基本定時器
STM32 TIM—基本定時器
STM32F4xx系列控制器有共有14個TIM定時器。其中2個高級控制定時器TIM1和TIM8、10 個通用定時器TIM2TIM5和TIM9TIM14、 2個基本定時器TIM6和TIM7。
各個定時器的特性如下:
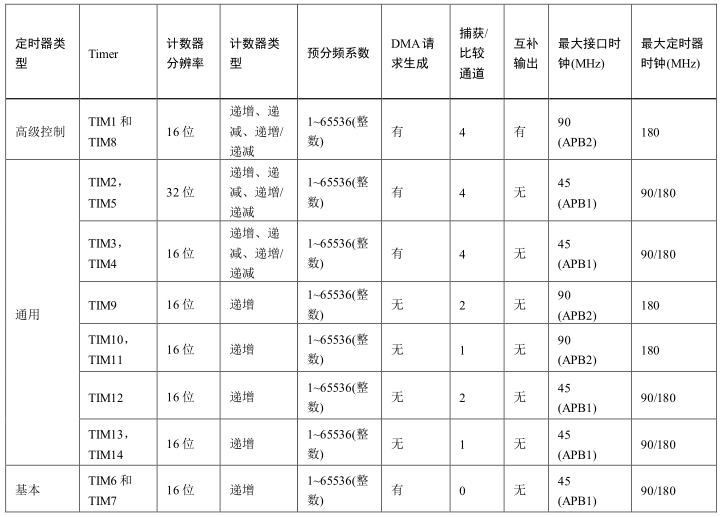
三種定時器中基本定時器是最簡單的,功能少,結構簡單,我們先從簡單的開始入手。
基本定時器主要兩個功能,第一就是基本定時功能,生成時基,第二就是專門用于驅動數模轉換器(DAC)。由于PWM波可以實現DAC的輸出,所以一般也就不用到基本定時器的第二個功能了。控制器的兩個基本定時器 功能完全一樣,但所用資源彼此都完全獨立,可以同時使用。
基本定時器 TIM6 和 TIM7是一個 16位向上遞增的定時器,當在自動重載寄存器(TIMx_ARR)添加一個計數值后并使能 TIMx,計數寄存器(TIMx_CNT)就會從 0 開始遞增,當 TIMx_CNT 的數值與 TIMx_ARR值相同時就會生成事件并把 TIMx_CNT 寄存器清 0,完成一次循環過程。如果沒有停止定時器就循環執行上述過程。
基本定時器框圖
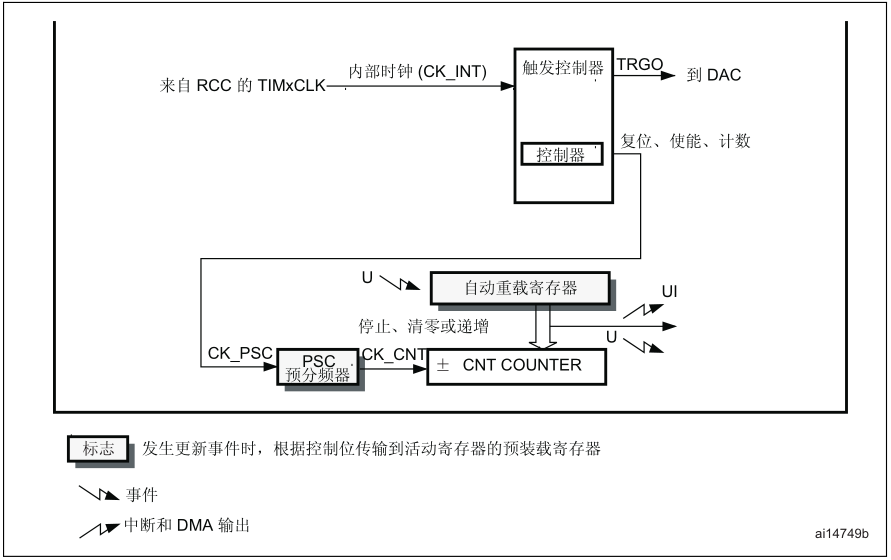
時基單元
可編程定時器的主要模塊由一個 16 位遞增計數器及其相關的自動重載寄存器組成。計數器的時鐘可通過預分頻器進行分頻。
計數器、自動重載寄存器和預分頻器寄存器可通過軟件進行讀寫。即使在計數器運行時也可執行讀寫操作。
時基單元包括:
● 計數器寄存器 (TIMx_CNT)
● 預分頻器寄存器 (TIMx_PSC)
● 自動重載寄存器 (TIMx_ARR)
自動重載寄存器是預裝載的。每次嘗試對自動重載寄存器執行讀寫操作時,都會訪問預裝載寄存器。預裝載寄存器的內容既可以直接傳送到影子寄存器,也可以在每次發生更新事件 UEV 時傳送到影子寄存器,這取決于 TIMx_CR1 寄存器中的自動重載預裝載使能位 (ARPE)。當計數器達到上溢值并且 TIMx_CR1 寄存器中的 UDIS 位為 0 時,將發送更新事件。該更新事件也可由軟件產生。
計數器由預分頻器輸出 CK_CNT 提供時鐘,僅當 TIMx_CR1 寄存器中的計數器啟動位 (CEN)置 1 時,才會啟動計數器。
請注意,實際的計數器使能信號 CNT_EN 在 CEN 置 1 的一個時鐘周期后被置 1。
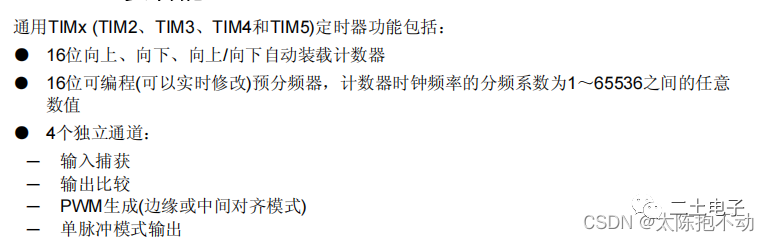
預分頻器
預分頻器可對計數器時鐘頻率進行分頻,分頻系數介于 1 和 65536 之間。該預分頻器基于TIMx_PSC 寄存器中的 16 位寄存器所控制的 16 位計數器。由于 TIMx_PSC 控制寄存器有緩沖,因此可對預分頻器進行實時更改。而新的預分頻比將在下一更新事件發生時被采用。
計數模式
計數器從 0 計數到自動重載值(TIMx_ARR 寄存器的內容),然后重新從 0 開始計數并生成計數器上溢事件。
每次發生計數器上溢時會生成更新事件,或將 TIMx_EGR 寄存器中的 UG 位置 1(通過軟件或使用從模式控制器)也可以生成更新事件。
通過軟件將 TIMx_CR1 寄存器中的 UDIS 位置 1 可禁止 UEV 事件。這可避免向預裝載寄存器寫入新值時更新影子寄存器。這樣,直到 UDIS 位中寫入 0 前便不會生成任何更新事件,但計數器和預分頻器計數器都會重新從 0 開始計數(而預分頻比保持不變)。此外,如果TIMx_CR1 寄存器中的 URS 位(更新請求選擇)已置 1,則將 UG 位置 1 會生成更新事件UEV,但不會將 UIF 標志置 1(因此,不會發送任何中斷或 DMA 請求)。
發生更新事件時,將更新所有寄存器且將更新標志(TIMx_SR 寄存器中的 UIF 位)置 1(取決于 URS 位):
● 使用預裝載值(TIMx_PSC 寄存器的內容)重新裝載預分頻器的緩沖區
● 使用預裝載值 (TIMx_ARR) 更新自動重載影子寄存器
時鐘源
計數器時鐘由內部時鐘 (CK_INT) 源提供。
CEN(TIMx_CR1 寄存器中)和 UG 位(TIMx_EGR 寄存器中)為實際控制位,并且只能通過軟件進行更改(保持自動清零的 UG 除外)。當對CEN 位寫入 1 時,預分頻器的時鐘就由內部時鐘 CK_INT 提供。
接下來了解基本定時器的相關寄存器:
TIM6 和 TIM7 控制寄存器 1 (TIMx_CR1)

位 7 ARPE:自動重載預裝載使能 (Auto-reload preload enable)
0:TIMx_ARR 寄存器不進行緩沖。
1:TIMx_ARR 寄存器進行緩沖。
位 3 OPM:單脈沖模式 (One-pulse mode)
0:計數器在發生更新事件時不會停止計數
1:計數器在發生下一更新事件時停止計數(將 CEN 位清零)。
位 2 URS:更新請求源 (Update request source)
此位由軟件置 1 和清零,用以選擇 UEV 事件源。
0:使能時,所有以下事件都會生成更新中斷或 DMA 請求。此類事件包括:
— 計數器上溢/下溢
— 將 UG 位置 1
— 通過從模式控制器生成的更新事件
1:使能時,只有計數器上溢/下溢會生成更新中斷或 DMA 請求。
位 1 UDIS:更新禁止 (Update disable)
此位由軟件置 1 和清零,用以使能/禁止 UEV 事件生成。
0:使能 UEV。更新 (UEV) 事件可通過以下事件之一生成:
— 計數器上溢/下溢
— 將 UG 位置 1
— 通過從模式控制器生成的更新事件
然后更新影子寄存器的值。
1:禁止 UEV。不會生成更新事件,各影子寄存器的值(ARR 和 PSC)保持不變。但如果將UG 位置 1,或者從從模式控制器接收到硬件復位,則會重新初始化計數器和預分頻器。
位 0 CEN:計數器使能 (Counter enable)
0:禁止計數器
1:使能計數器
注意:只有事先通過軟件將 CEN 位置 1 ,才可以使用門控模式。而觸發模式可通過硬件自動將CEN 位置 1 。
在單脈沖模式下,當發生更新事件時會自動將 CEN 位清零。
TIM6 和 TIM7 控制寄存器 2 (TIMx_CR2)

位 6:4 MMS:主模式選擇 (Master mode selection)
這些位用于選擇主模式下將要發送到從定時器以實現同步的信息 (TRGO)。這些位的組合如下:
000:復位——TIMx_EGR 寄存器中的 UG 位用作觸發輸出 (TRGO)。如果復位由觸發輸入生成(從模式控制器配置為復位模式),則 TRGO 上的信號相比實際復位會有延遲。
001:使能——計數器使能信號 (CNT_EN) 用作觸發輸出 (TRGO)。該觸發輸出可用于同時啟動多個定時器,或者控制在一段時間內使能從定時器。計數器使能信號由 CEN 控制位與門控模式下的觸發輸入的邏輯或運算組合而成。
當計數器使能信號由觸發輸入控制時,TRGO 上會存在延遲,選擇主/從模式時除外(請參見TIMx_SMCR 寄存器中對 MSM 位的說明)。
010:更新——選擇更新事件作為觸發輸出 (TRGO)。例如,主定時器可用作從定時器的預分頻器。
TIM6 和 TIM7 DMA/ 中斷使能寄存器 (TIMx_DIER)

位 8 UDE:更新 DMA 請求使能 (Update DMA request enable)
0:禁止更新 DMA 請求。
1:使能更新 DMA 請求。
位 0 UIE:更新中斷使能 (Update interrupt enable)
0:禁止更新中斷。
1:使能更新中斷。
TIM6 和 TIM7 狀態寄存器 (TIMx_SR)

位 0 UIF:更新中斷標志 (Update interrupt flag)
該位在發生更新事件時通過硬件置 1。但需要通過軟件清零。
0:未發生更新。
1:更新中斷掛起。該位在以下情況下更新寄存器時由硬件置 1:
— 上溢或下溢并且當 TIMx_CR1 寄存器中 UDIS = 0 時。
— 當由于 TIMx_CR1 寄存器中 URS = 0 且 UDIS = 0 而通過軟件使用 TIMx_EGR 寄存器中的 UG 位重新初始化 CNT 時。
TIM6 和 TIM7 事件生成寄存器 (TIMx_EGR)

位 0 UG:更新生成 (Update generation)
該位可通過軟件置 1,并由硬件自動清零。
0:不執行任何操作。
1:重新初始化定時器計數器并生成寄存器更新事件。請注意,預分頻器計數器也將清零(但預分頻比不受影響)。
基本定時器初始化函數和中斷處理函數如下
void Timer6_Init(u16 arr,u16 pre)
{
u32 prigroup = 0;
u32 priority = 0;
//1. 開時鐘
RCC- >APB1ENR |= 1< 4;
//2. 設置模式
// TIM6- >CR1 = 0;
TIM6- >CR1 |= 1< 7; //開啟預裝載功能
TIM6- >CR1 &= ~(1< 3); //連續計數
TIM6- >CR1 |= 1< 2; //UG置1,產生更新,但不產生中斷
TIM6- >CR1 |= 1< 1; //暫時不產生更新
TIM6- >CR1 &= ~(1< 0); //配置完成前,先關閉計數器
//3. 設置預分頻
Timer6_SetPre(pre);
//4. 設置自動重裝載
Timer6_SetArr(arr);
//5. 設置中斷
//清標記
TIM6- >SR &= ~(1< 0);
//開外設中斷
TIM6- >DIER |= 1< 0;
//NVIC
prigroup = NVIC_GetPriorityGrouping();
priority = NVIC_EncodePriority(prigroup,1,2);
NVIC_SetPriority(TIM6_DAC_IRQn,priority);
NVIC_EnableIRQ(TIM6_DAC_IRQn);
//6. 更新并開啟計數器
TIM6- >CNT = 0;
//允許更新
TIM6- >CR1 &= ~(1< 1);
//產生更新
TIM6- >EGR |= 1< 0;
//開啟定時器
TIM6- >CR1 |= 1< 0;
}
void Timer6_SetArr(u16 arr)//重裝載值設置
{
if(arr == 0)
TIM6- >ARR = 0;
else
TIM6- >ARR = arr - 1;
}
void Timer6_SetPre(u16 pre)//分頻設置
{
if(pre == 0)
TIM6- >PSC = 0;
else
TIM6- >PSC = pre - 1;
}
u8 led_flag = 0;
//中斷處理
void TIM6_DAC_IRQHandler()
{
if(TIM6- >SR & (1< 0))
{
//1. 清標記
TIM6- >SR &= ~(1< 0);
//2. 中斷處理
led_flag = ~led_flag;
}
else
TIM6- >SR = 0;
}
接著編寫主函數進行測試
#include "stm32f4xx.h"
#include "led.h"
#include "timer.h"
int main()
{
LED_Init();
Timer6_Init(18000,1250); //一個周期0.125s
while(1)
{
if(led_flag)
LED_Toggle(); //0.25sLED翻轉一次,1s翻轉四次
}
}
```至此,基本定時器的功能就結束了,對于通用定時器和高級定時器的定時功能與基本定時器使用方法一樣,這里就不再贅述。
-
控制器
+關注
關注
112文章
16197瀏覽量
177395 -
定時器
+關注
關注
23文章
3237瀏覽量
114464 -
數模轉換器
+關注
關注
14文章
984瀏覽量
83090 -
PWM波
+關注
關注
0文章
99瀏覽量
16839 -
STM32F4
+關注
關注
3文章
194瀏覽量
27991
發布評論請先 登錄
相關推薦
STM32 TIM定時器的外部計數功能 計數值能不能為1啊?
STM32 TIM定時器
STM32 TIM定時器的使用(1)——定時 精選資料分享
STM32---定時器知多少

STM32定時器學習---基本定時器
STM32 TIM定時器的使用(5)——PWM驅動電調控制無刷電機





 工商網監
工商網監
評論