 VASS PLC控制機器人分析
VASS PLC控制機器人分析
FB 201 FB_Rob_PN_A
FB 201機器人輸入影像到DB塊
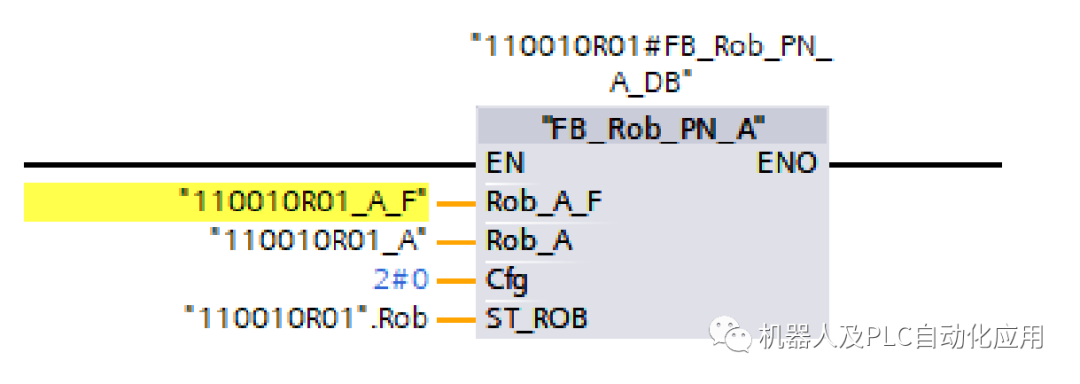
該模塊將Robot的輸出數據復制到Robot結構中。
該模塊通常使用自己的實例數據模塊進行訪問。
實例數據模塊的“符號名稱”應如下所示:
xxxxxx Rxx#FB_Rob_PN_A_DB,例如110010R01#FB_Rob_PN_A_DB以下內容應在“符號注釋”處注冊:機器人輸出.
該變量是機器人輸出(SPS輸入)的初始地址,模塊將所有機器人輸出數據寫入機器人結構中。
FB 202 FB_Rob_PN_E
FB 201DB塊輸出機器人
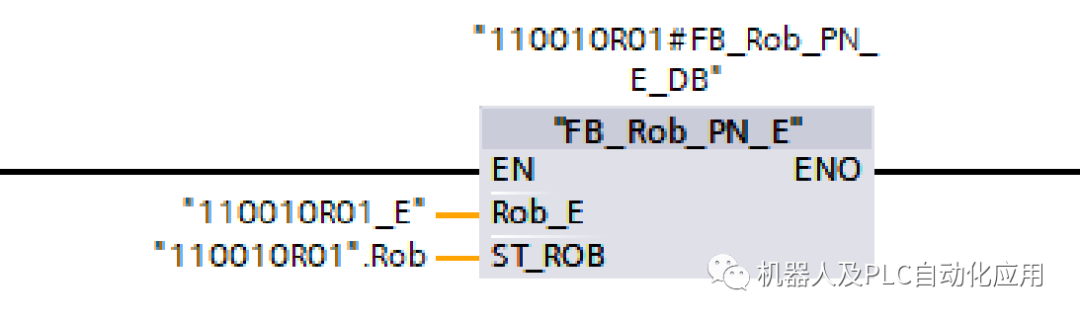
該模塊將機器人結構的數據復制到機器人的輸入數據區域。
該模塊通常使用自己的實例數據模塊進行訪問。
實例數據模塊的“符號名稱”應如下所示:
xxxxxx Rxx#FB_Rob_PN_E_DB,例如110010R01#FB_Rob_PN_E_DB以下內容應在“符號注釋”處注冊:機器人輸入
將鼠標指針移動到模塊輸入和輸出上。通過這些鏈接,您可以立即跳轉到文檔的點,文檔描述了這些輸入和輸出。
FB 203 FB_RobFolge_8
FB203 機器人程序號分配
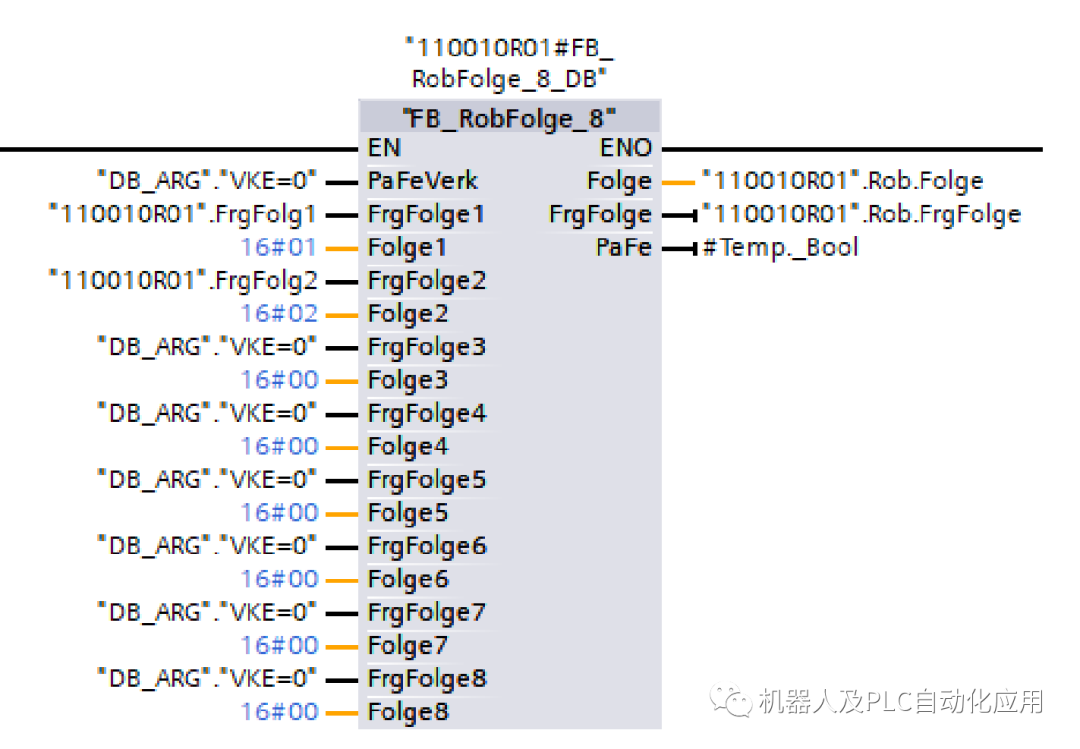 該模塊根據可用的序列發布(“FrgSequence1”、“FrgSequence2”、…、“Frg Sequence8”),在模塊輸出“sequence”處發布相應的序列號(“Sequence1”,“Sequence2”、..、“Sequence8”。
該模塊根據可用的序列發布(“FrgSequence1”、“FrgSequence2”、…、“Frg Sequence8”),在模塊輸出“sequence”處發布相應的序列號(“Sequence1”,“Sequence2”、..、“Sequence8”。
該模塊通常使用自己的實例數據模塊進行訪問。
實例數據模塊的“符號名稱”應如下所示:
xxxxxx Ryy#FB_RobFolge_8_DB,例如110010R01#FB_RobFolge_8-DB以下內容應在“符號注釋”處注冊:機器人序列選擇
通過級聯15個序列而不是僅8個序列可以被參數化。使用模塊“FB_RobFolge_16”,可以在不級聯的情況下對16個序列進行參數化。
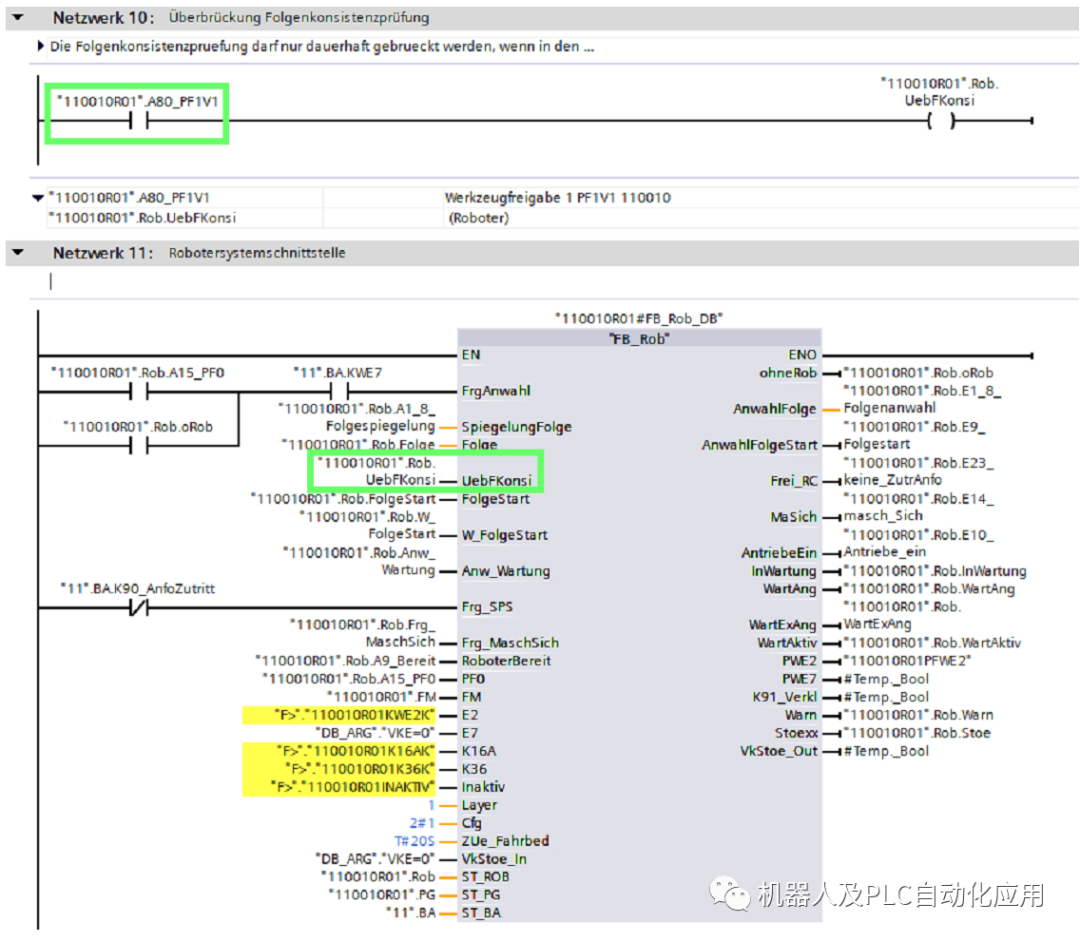
FB 200 FB_Rob
FB200 機器人邏輯控制
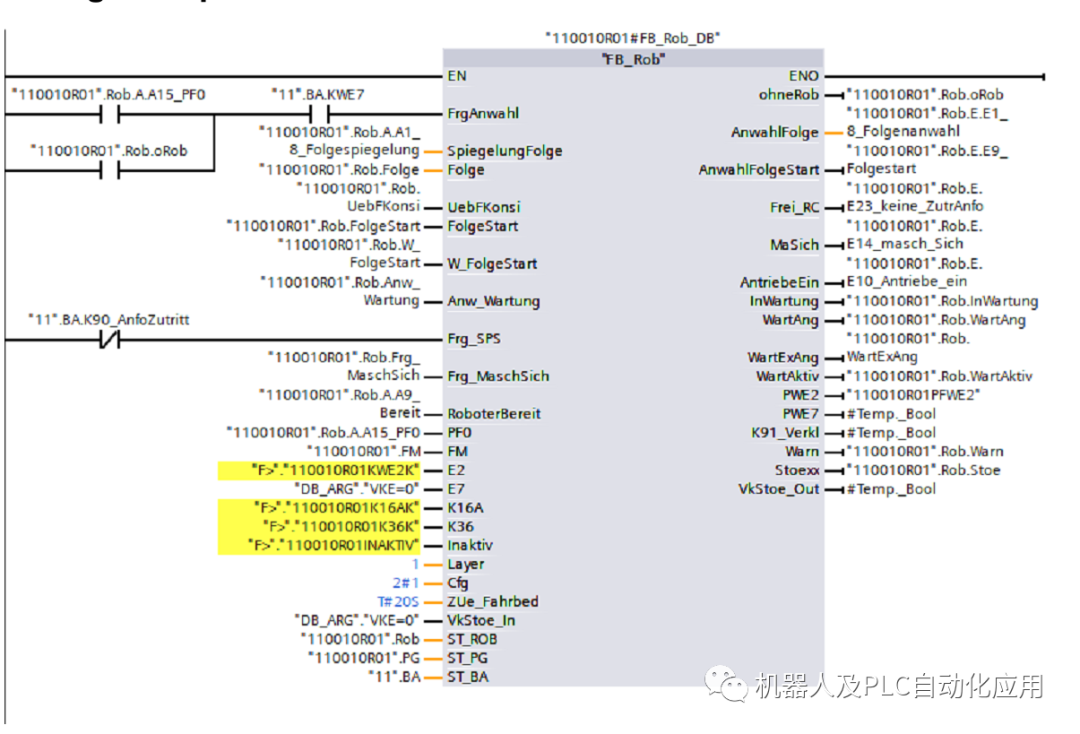
這個塊用于控制機器人的運動。
此塊通常使用專用實例數據塊進行訪問。
實例數據塊的“符號名稱”必須顯示如下:
xxxxxx Ryy#FB_Rob_DB,例如110010R01#FB_Rob_DB以下內容應在“符號注釋”處注冊:Roboter
塊體結構
? 過程控制(“過程前停止”)
? 暫停機器人(“PLC行程啟用”)
? 將機器人移至維修位置
? 啟動順序(系統處于自動啟用模式K26)
? 機械安全啟用/序列一致性檢查
? 機器人驅動連接
? 機器人按順序輸出
? 報警系統
啟動順序(系統處于自動啟用模式K26)
機器人在工廠自動啟用模式(K26)下的順序啟動(E9)需要以下信號狀態:
? 塊輸入“Folge”處的序列號不得等于0。
? 如果未選擇維護位置(塊輸出“WartAng”=False),則塊輸入“FolgeStart”必須為True。
? 如果選擇了維護位置,則塊輸入“W_FolgeStart”必須為True(塊輸出“WartAng”=True)。
? 機器人必須“準備就緒”(A9_Bereit=True)。
? 機器人必須位于0點(A15_PF0=真)。
? 來自機器人的外部緊急停止反饋(塊輸入“K16A”)必須為True。
? 來自機器人的操作員保護/安全電路反饋(塊輸入“K36”)必須為True。
? 機器人必須輸出“執行器啟用”(A10_FRG_Stellglieder=True)。
? 機器人必須處于自動模式(A12_Automatik=True)。
? 機器人不得處于最后一點(A14_LPKT=錯誤)。
? 工廠或模式區域必須處于自動啟用模式(K26_FrAuto=True)。
? 不得取消選擇機器人(ohneRob=False)。
? 所選序列(E1_8_Folgennwahl)必須與序列鏡像(A1_8_Folgespiegelung)相對應。
? 機器人驅動器必須打開(E10_Antriebe_ein=True)。
機械安全啟用/序列一致性檢查
檢測到序列不一致或缺少“機械安全啟用”(塊輸入“Frg_MaschSich”)將清除“機械安全”(E14)并暫停機器人。
序列不一致檢測必須滿足以下條件:
? 序列鏡像(“SpiegelungFolge”)必須<>0、<>基本位置序列和<>維護序列
? 序列一致性檢查覆蓋(“UebFKonsi”)必須為FALSE,并且機器人不得處于“PF0”中
? 塊輸入“Folge”處的序列必須<>0且<>序列鏡像(“SpiegelungFolge”)
特殊情況:
序列一致性檢查不會被“VKE=1”覆蓋。
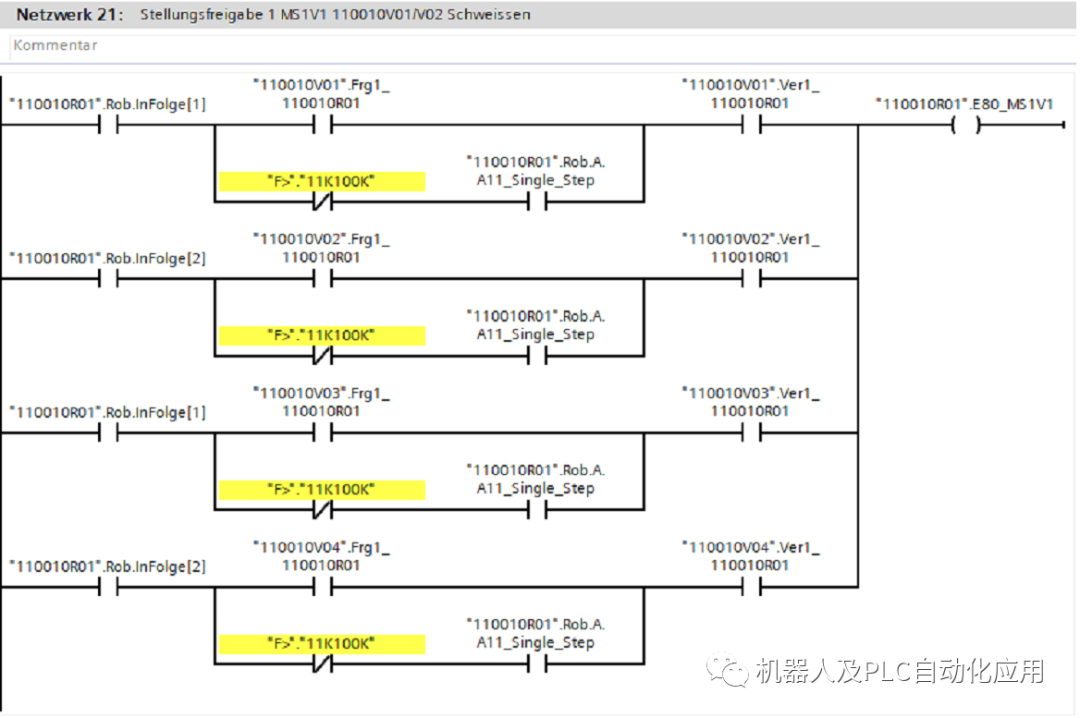
需要為焊接機器人和搬運機器人編程序列一致性檢查超控(符合工廠布局)。
如果機器人沒有在相應的工具中工作,則工具啟用(例如PF1V1)會覆蓋序列一致性檢查。
如果夾持器不可能/不足以繞過無輪廓,則必須將來自機器人(InFolge)的順序反饋編程為相應工位的位置啟用(例如MS1V1)。
機器人驅動連接
機器人驅動器(E10)在以下條件下打開:
? 設備或模式區域處于自動啟用模式(K26_FrAuto=True),或者設備或模式區處于手動啟用模式(K2 5_FrHand),并且“啟動”按鈕被激活。
? 機器人必須位于點0(A15_PF0=True)或路徑上(A16_SAK=True)。
? 機器人必須“準備就緒”(A9_Bereit=True)。
? 機器人必須輸出“執行器啟用”(A10_FRG_Stellglieder=True)。
? 機器人必須處于自動模式(A12_Automatik=True)。
? 來自機器人的外部緊急停止反饋(塊輸入“K16A”)必須為True。
? 來自機器人的操作員保護/安全電路反饋(塊輸入“K36”)必須為True。
? 不得取消選擇機器人('hneRob'=False)。
機器人按順序輸出
在機器人結構中,每個序列號(1-125)都有一個位(BOOL),只有當機器人在相應的序列中時才會設置。
ST_ROB.InFolge[1]
。。。
。。。
ST_ROB.InFolge[125]
例如,如果機器人鏡像序列10(A1_8_Folgespiegelung=10),則1050R01.InFolge[10]位變為True。所有其他位均為False。
例如,這些位現在可以用于旅行啟用,因此機器人只有在正確的順序下才能繼續旅行。
序列重復
與負責的規劃者協商后,可以使用Cfg.X2=True激活時間優化序列處理。當序列開始掛起并且具有正確的序列鏡像時,可以通過E22_Frg_Folgenwieder輸入從序列結束跳到序列開始。執行跳轉時,輸出A22_Folgenwiederh_aktiv變為True。有關此功能的編程,請參閱機器人編程說明。
編程順序重復:
(*********************)
(*序列重復*)
(*********************)
ST_ROB.E22_Frg_Folgenwiederh := FolgeStart And (Folge = SpiegelungFolge) And NotPF0 And Not Anw_Wartung And Cfg.X2;

FB 250 FB_Rob_Greifer 機器人抓手控制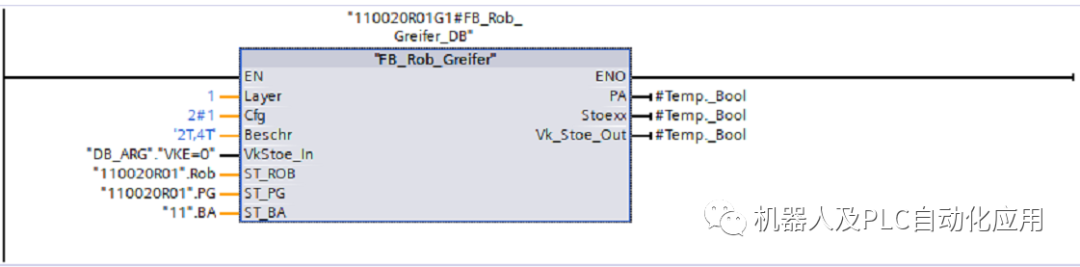
此塊用于夾具的維護選擇。
此塊通常使用專用實例數據塊進行訪問。
維修位置選擇
可通過“維護”按鈕(切換功能)選擇/確認維護位置。
當到達維護位置時,文本從“維護”變為“維護確認”。
將特定的夾持器發送到維護位置
在選擇維護位置之前,必須選擇要移動到維護位置的夾持器。然后必須使用維護按鈕選擇維護位置。然后,機器人帶著夾具移動到維護位置。
顯示哪個夾持器處于維護位置
當機器人處于維護位置時,機器人告訴PLC當前正在維護的夾具。此狀態由“Gripper1/5”、“Gripper2/6”、“Gripper3/7”或“Gripper4/8”中的顏色變化指示。

| 輸入說明 | 輸出說明 | |
| E/A 113 | 維護時選擇多個夾具5 | 過程處于活躍狀態 |
| E/A 114 | 維護時選擇多個夾具6 | 擠夾指示器 |
| E/A 115 | 維護時選擇多個夾具7 | 對接系統故障 |
| E/A 116 | 維護時選擇多個夾具8 | 過程處于活躍狀態 |
| E/A 117 | Res | KS 電機/末位位置誤差 |
| E/A 118 | Res | KF 電機/起動器錯誤 |
| E/A 119 | Res | 短路焊接誤差 |
| E/A 120 | Res | 組故障 |
| E/A 121? | 維護時選擇多個夾具1 | 過程處于活躍狀態 |
| E/A 122 | 維護時選擇多個夾具2 | 擠夾指示器 |
| E/A 123 | 維護時選擇多個夾具3 | 零件控制誤差 |
| E/A 124 | 維護時選擇多個夾具4 | 檢查運行中傳感器的誤差 |
| E/A 125 | 保留 | 組故障 |
| E/A 126 | 保留 | 保留 |
| E/A 127?? | 機器人 XY 的在線使能 1 | 用于機器人 XY 的在線使能 1 |
| E/A 128 | 機器人 XY 在線使用 2 | 用于機器人 XY 的在線使能 2 |
-
模塊
+關注
關注
7文章
2671瀏覽量
47340 -
機器人
+關注
關注
210文章
28205瀏覽量
206526 -
plc
+關注
關注
5008文章
13151瀏覽量
462072 -
Robot
+關注
關注
0文章
34瀏覽量
11025
原文標題:VASS PLC控制-機器人分析V7.21
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何遠程控制機器人?
什么是工業機器人
機器人是什么?
VASS 標準機器人的附加功能

PLC對機器人的互鎖信號控制






 工商網監
工商網監
評論