") KUKAC4通過HMI更改軟件限位開關數(shù)值的方法
KUKAC4通過HMI更改軟件限位開關數(shù)值的方法
軟件極限開關
通過可設定的軟件限位開關范圍,可限制所有機械手和定位軸的軸運動范圍。該軟件限位開關范圍僅用作機器防護裝置,并設定為可防止機械手 / 定位設備行駛到機械末端擋板(即硬限位)。軟件限位開關在工業(yè)機器人”投入運行”時被設定。
現(xiàn)在KUKAC4通過HMI有兩種更改軟件限位開關數(shù)值的方法:
1.手動輸入所需的數(shù)值,通過自己的測量和評估。
2.軟限位的值自動與一個或多個程序適配。
通過機器人程序需求,在此過程中,機器人控制系統(tǒng)確定在程序中出現(xiàn)的最小和最大軸位置,作為參考。得出的這些數(shù)值可以作為軟件限位開關來使用。
手動更改軟件限位開關:
1. 在HMI主菜單中選擇”投入運行” --> “售后服務” --> “軟件限位開關”。窗口軟件限位開關自動打開。
2. 在負和正兩列中按需要更改限位開關的范圍。
3. 用保存鍵保存更改后的數(shù)值。
將軟件限位開關與程序相適配:
1.在主菜單中選擇”投入運行” --> “售后服務”--> “軟件限位開關”。窗口軟件限位開關自動打開。
2. 按下”自動計算”。顯示以下提示信息:”自動獲取進行中”(但其數(shù)值極其不準確,需要進行調整) 。
3. 啟動限位開關應與之相適配的機器人程序。讓程序完整運行一遍,然后取消選擇。
此時機器人在窗口軟件限位開關中即顯示每個軸所達到的最大和最小位置。
4. 為該軟件限位開關應與之相適配的所有程序重復步驟 3。
在窗口軟件限位開關中即顯示每個軸所達到的最大和最小位置,而且以執(zhí)行的所有程序為基準。
5. 如果所有需要的程序都執(zhí)行過了,則在窗口軟件限位開關中按下結束。

6. 按下”保存”,以便將確定的數(shù)值用作軟件限位開關數(shù)值范圍。
7. 如有需要時還可以手動更改自動確定的數(shù)值。
8. 用”保存鍵”保存更改。
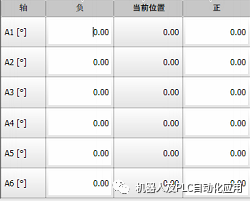
窗口軟件限位開關:
1 .當前的負方向軟限位開關.
2 .軸的當前位置值.
3 .當前的正方向軟限位開關.
4. 自啟動計算以來,相應軸所具有的最小位置值.
5. 自啟動計算以來,相應軸所具有的最大位置值.
| “自動計算” |
啟動自動確定: 機器人控制系統(tǒng)將軸目前具有的最小及最大位置寫入窗口軟件限位開關中的最小和最大兩列里。 |
| “結束” | 結束自動確定。確定的最小/最大位置被傳送到負和正兩列中,但是它們還沒有被保存。 |
| “保存” | 將這些數(shù)值作為軟件限位開關保存在負和正兩列里。 |
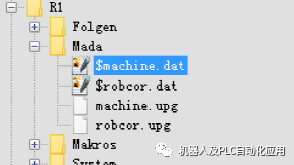
存儲軟限位參數(shù)的文件:“$MACHINE”。
例如:
正向最大值:
REAL $SOFTP_END[12] ;軟件-ENDSCHALTER 正的極限[I] (I=1:A1,I=7:E1) [MM,GRAD]
$SOFTP_END[1]=185.0
$SOFTP_END[2]=20.0
$SOFTP_END[3]=144.0
$SOFTP_END[4]=350.0
$SOFTP_END[5]=120.0
$SOFTP_END[6]=350.0
$SOFTP_END[7]=230.0
負向最大值:
REAL $SOFTN_END[12] ;軟件-ENDSCHALTER 負的極限[I] (I=1:A1,I=7:E1) [MM,GRAD]
$SOFTN_END[1]=-185.0
$SOFTN_END[2]=-130.0
$SOFTN_END[3]=-100.0
$SOFTN_END[4]=-350.0
$SOFTN_END[5]=-120.0
$SOFTN_END[6]=-350.0
$SOFTN_END[7]=-10000.0
審核編輯:劉清
-
控制系統(tǒng)
+關注
關注
41文章
6550瀏覽量
110498 -
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
存儲器
+關注
關注
38文章
7455瀏覽量
163623 -
工業(yè)機器人
+關注
關注
91文章
3353瀏覽量
92569
原文標題:KUKAC4更改軟件限位開關
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
一種利用限位開關實現(xiàn)步進電機的轉動和停轉的方法
什么是串口HMI?
HMI及Inotouch Editor組態(tài)軟件的應用
淺談工業(yè)限位開關應用故障及解決方法

限位開關的用途及使用時遇到的情況

限位開關的作用
限位開關實物接線圖_限位開關接線方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論