 Profinet轉ModbusTCP網關連接DCS與發那科機器人
Profinet轉ModbusTCP網關連接DCS與發那科機器人
DCS與機器人通信時,Funuc作為服務器端,DCS作為客戶端通過開疆Profinet轉ModbusTCP網關向Funuc發送讀寫請求,Funuc應答后DCS通過Profinet轉ModbusTCP網關接收Funuc的數據,實現數據的傳遞,注意:Modbus不能同步進行通信,主機在同一時間內只能向一個從機發送請求,總線上每次只有一個數據進行傳輸,即主機發送,從機應答,主機不發送,總線上就沒有數據通信。從機不會自己發送消息給主站,只能回復從主機發送的消息請求。
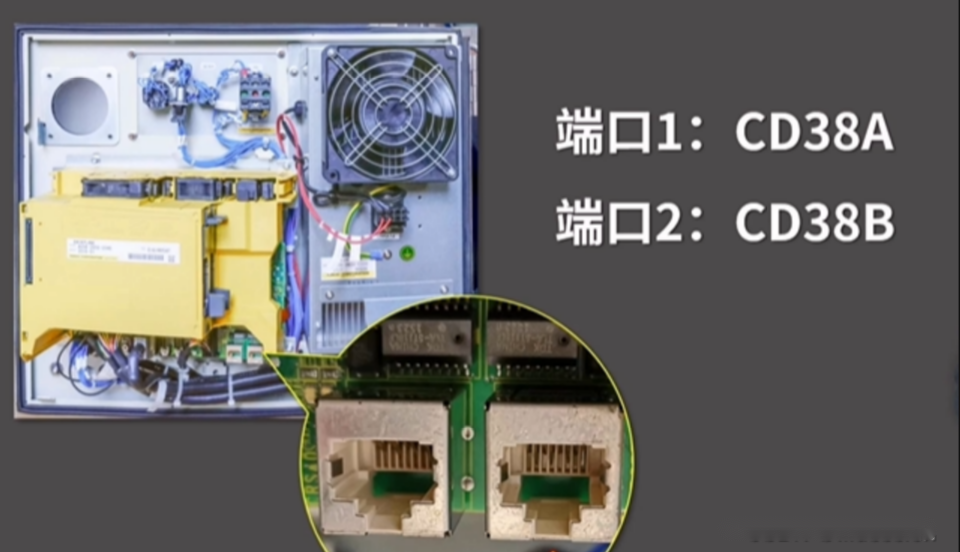
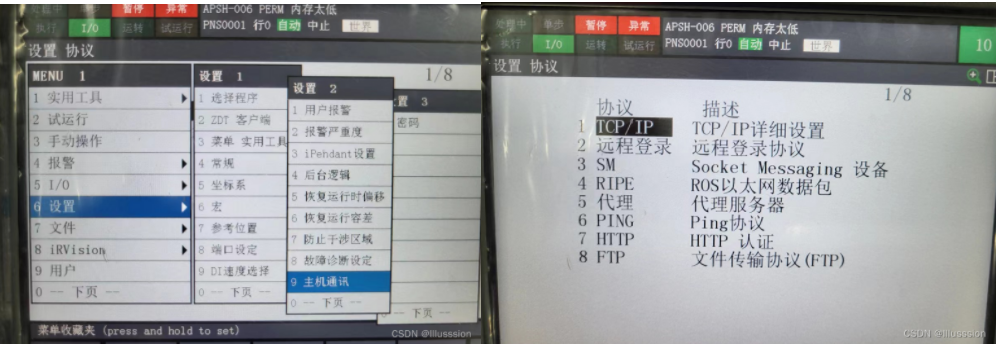
1、硬件連接,此處端口1,IP設置:MENU-設置-設置2-主機通訊,選擇TCP/IP設置;
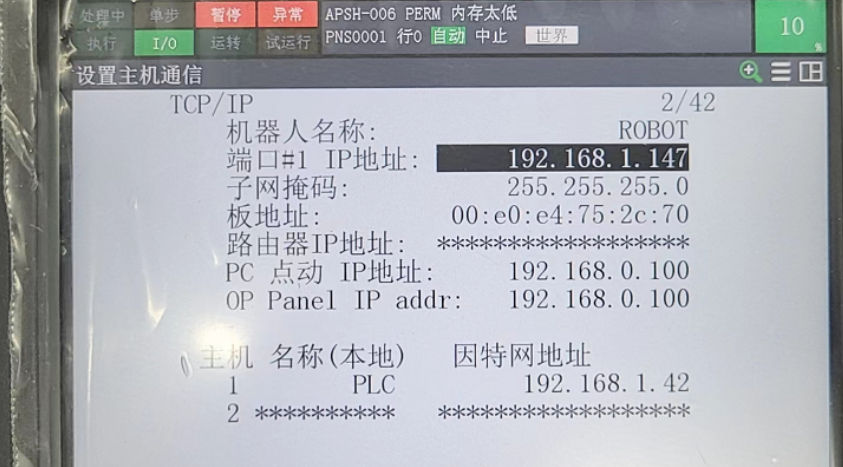
2、在此界面可以設置FUNUC的IP,以及固定要連接的客戶端的IP,防止未授權的主機連接機器;
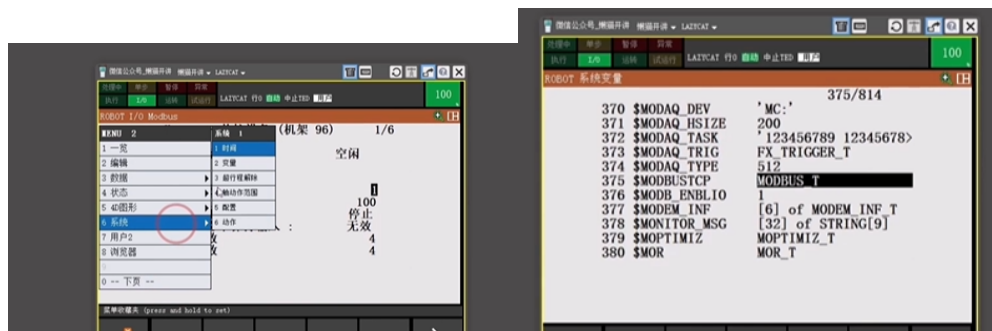
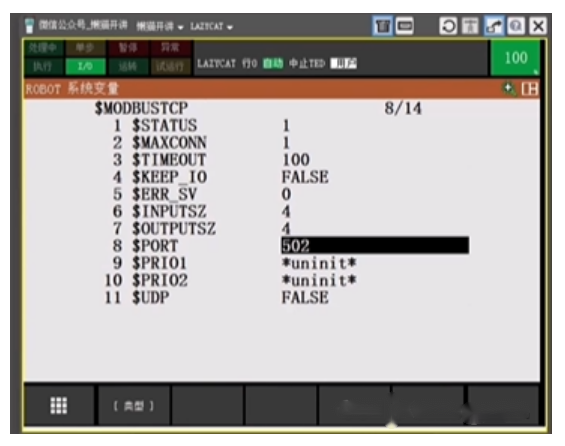
3、端口設置:MENU-下一頁-系統-變量進入MODBUSTCP設置,在PORT參數中修改端口號;
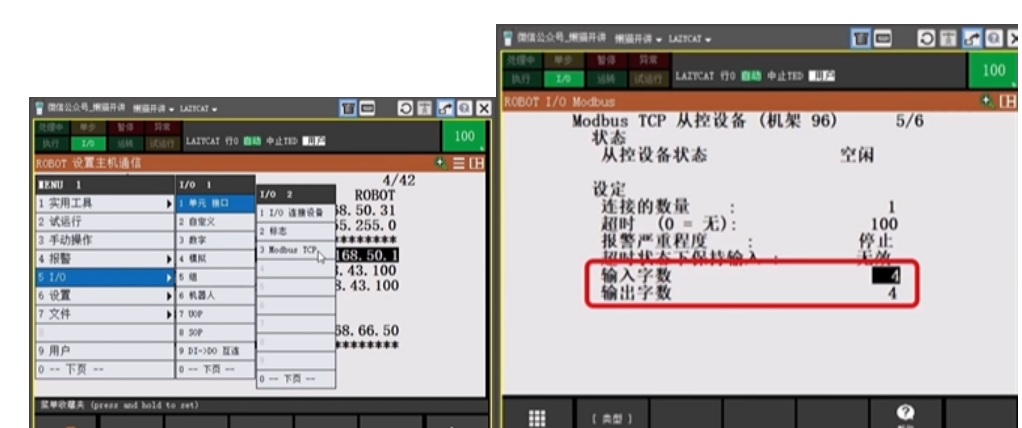
4、PLC要讀寫的機器人的寄存器數值設定:此設定值要大于PLC要讀寫的存儲器數量,MENU-IO-MODBUS TCP進入,此處可以設置MODBUS TCP通信參數,比如要寫UI【1】-UI【20】需要3個16位存儲器,還要寫6個GI存儲器,此處輸入字數位4就顯然不夠了 可以設大一點;
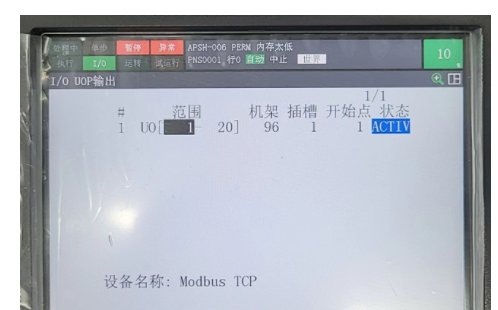
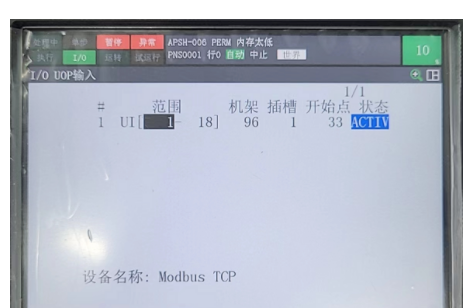
5、機器人存儲器分配:MODBUS TCP通信時機器人機架號固定為96,槽位號為1,UO需要兩個存儲器對應的MB地址位30001-30002
UI需要兩個存儲器對應的MB地址位40003-40004,GI需要6個存儲器 對應的MB地址位40005-40010;
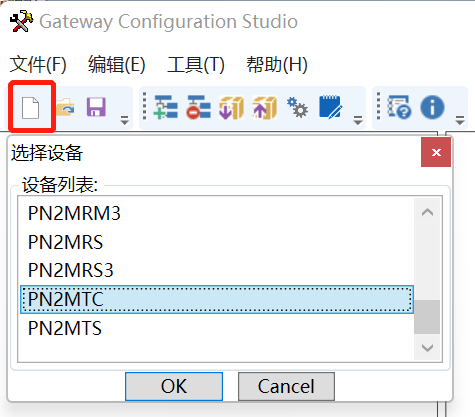
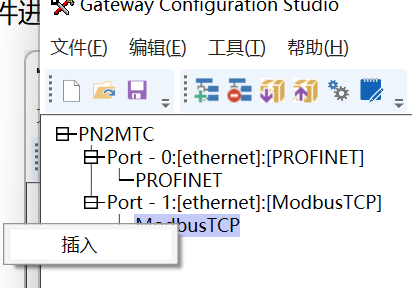
6、從站設置已經完成,打開Profinet轉ModbusTCP網關配置軟件進行Profinet轉ModbusTCP網關配置,打開軟件,點擊紅圈處新建項目選擇PN2MTC;
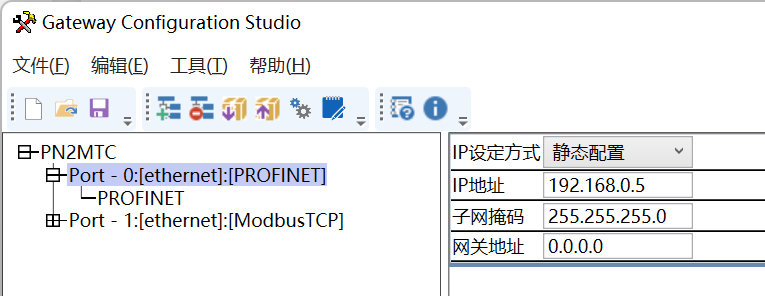
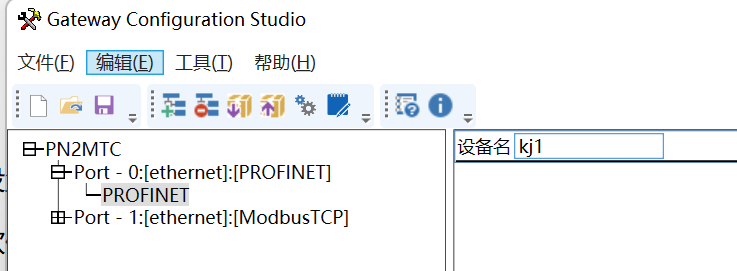
7、設置Profinet轉ModbusTCP網關在Profinet網絡中的IP地址及設備名稱(新版可通過組態軟件進行分配);
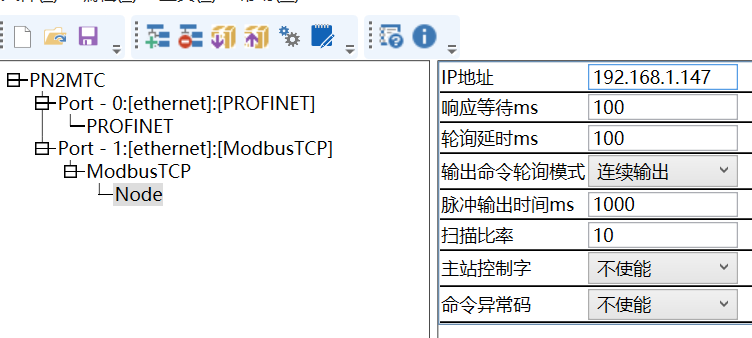
8、設置Profinet轉ModbusTCP網關的ModbusTCP通訊參數首先設置Profinet轉ModbusTCP網關在客戶端一側的IP地址;
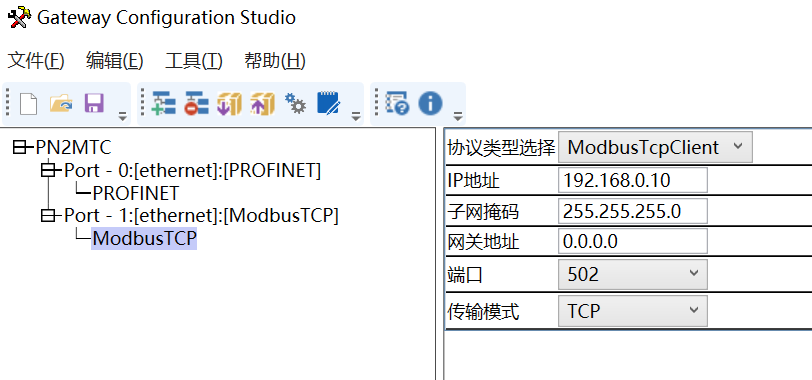
9、在ModbusTCP處右鍵添加從站,并填寫服務器(機器人)的IP地址;
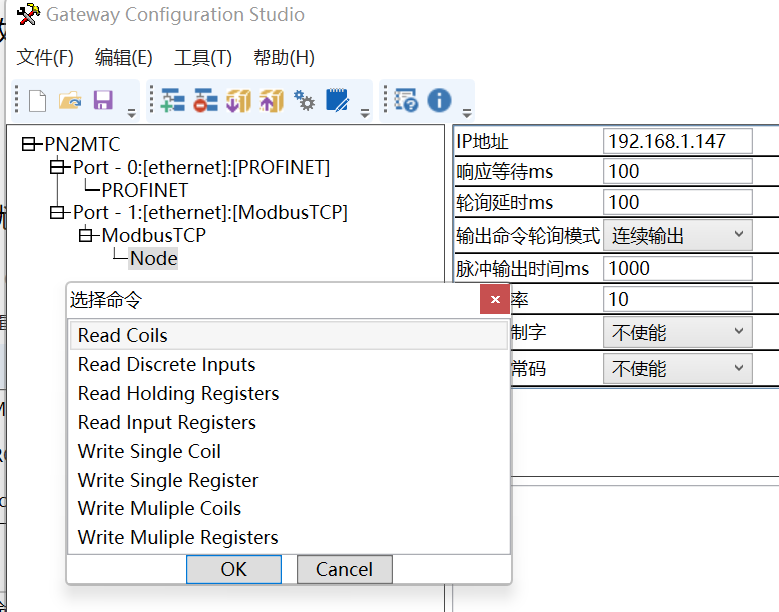
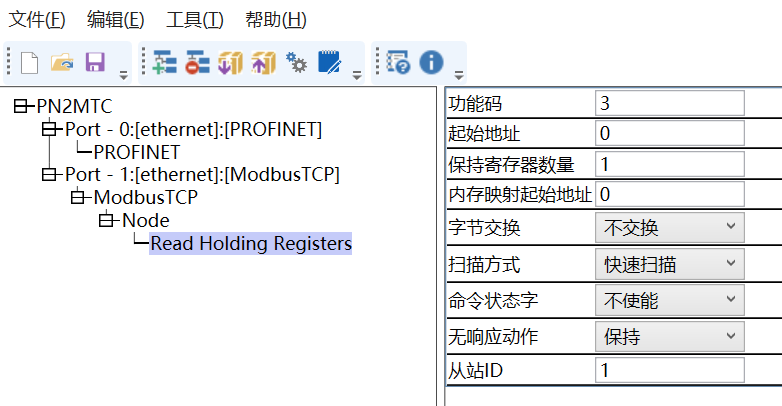
10、在NODE處右鍵添加所需功能碼,比如用的是03H功能碼讀取40000地址區那么我們就選擇Read Holding Registers(讀保持寄存器);
11、主站軟件中讀取40001-40010是個寄存器數據,但是主站軟件中寄存器地址從40001開始,而Profinet轉ModbusTCP網關是從40000開始所以地址要填0,寄存器數量10個,內存映射起始地址為0對應Profinet主站起始地址;
12、到此Profinet轉ModbusTCP網關設置完畢,打開DCS的組態軟件SYCON.net;
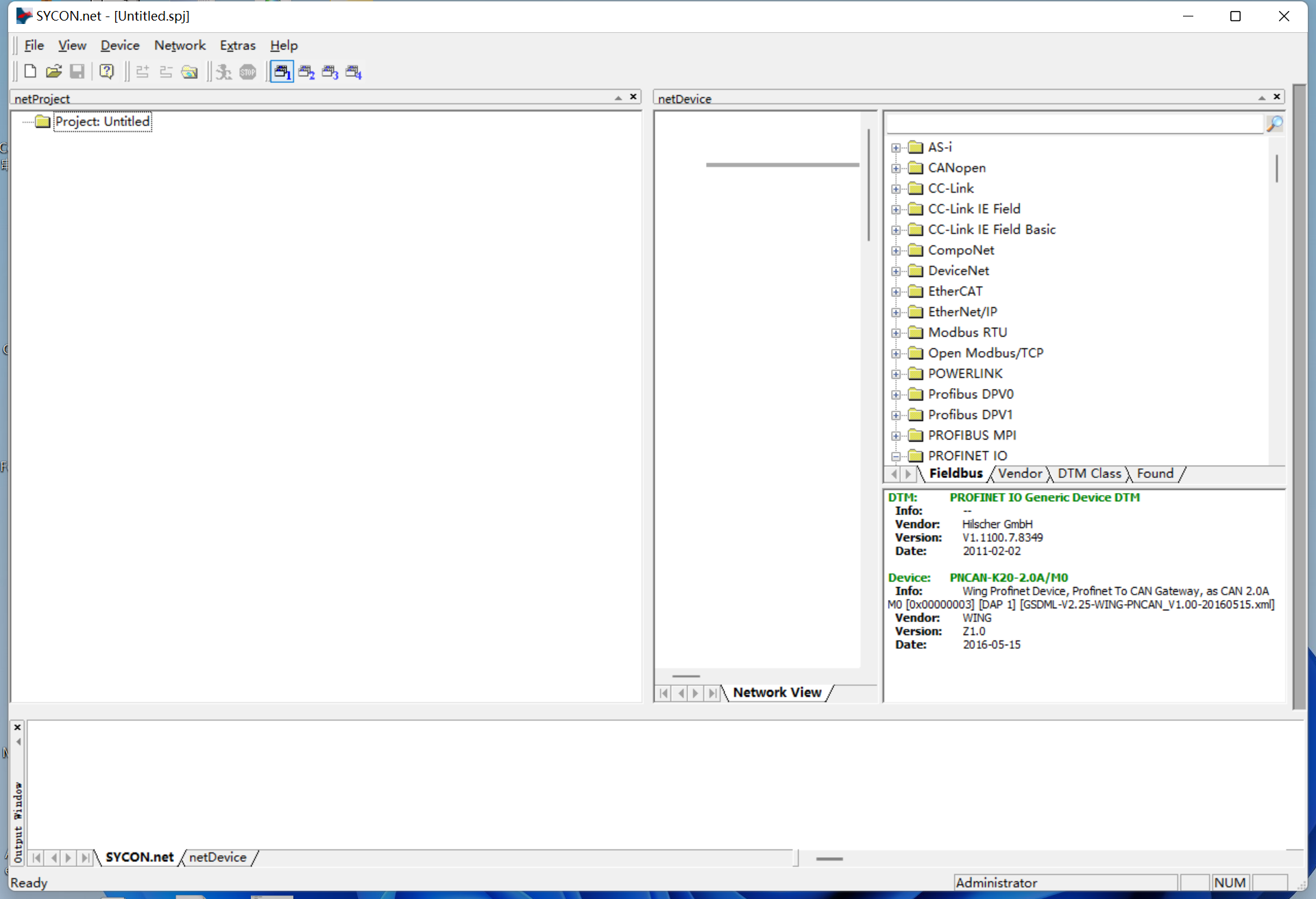
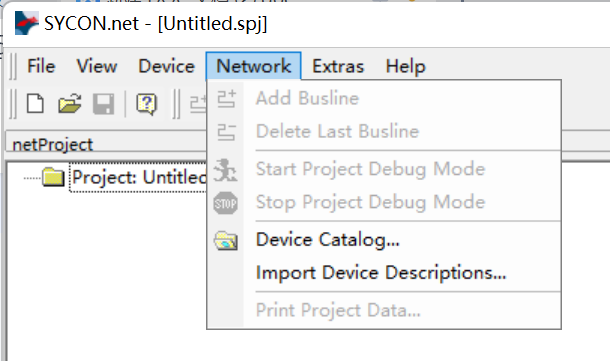
13、添加Profinet轉ModbusTCP網關的GSD文件,點擊Improt Device Descriptions;
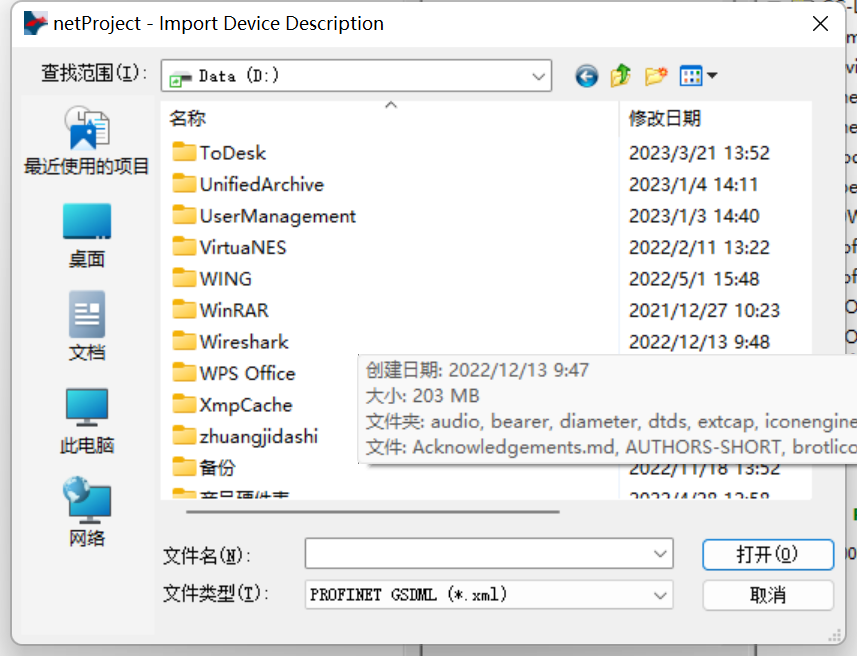
14、選擇GSD文件所在的文件夾,選中GSD文件;
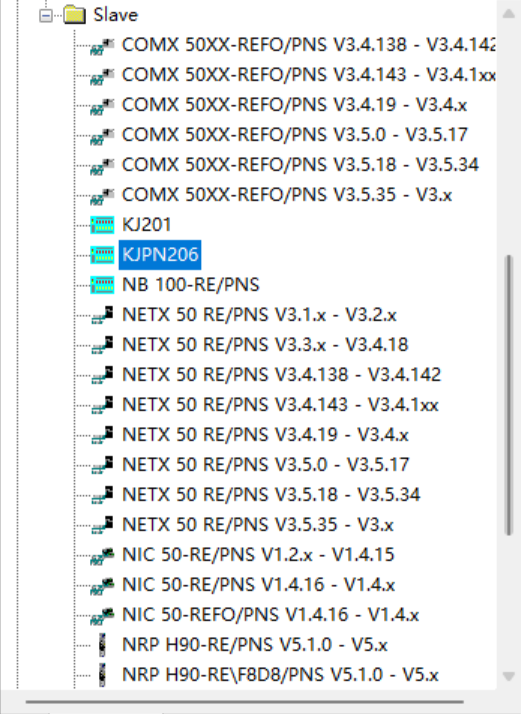
15、選擇開疆智能KJ-PNG-206,將Profinet轉ModbusTCP網關掛在Profinet總線上,雙擊Profinet轉ModbusTCP網關進入配置界面;
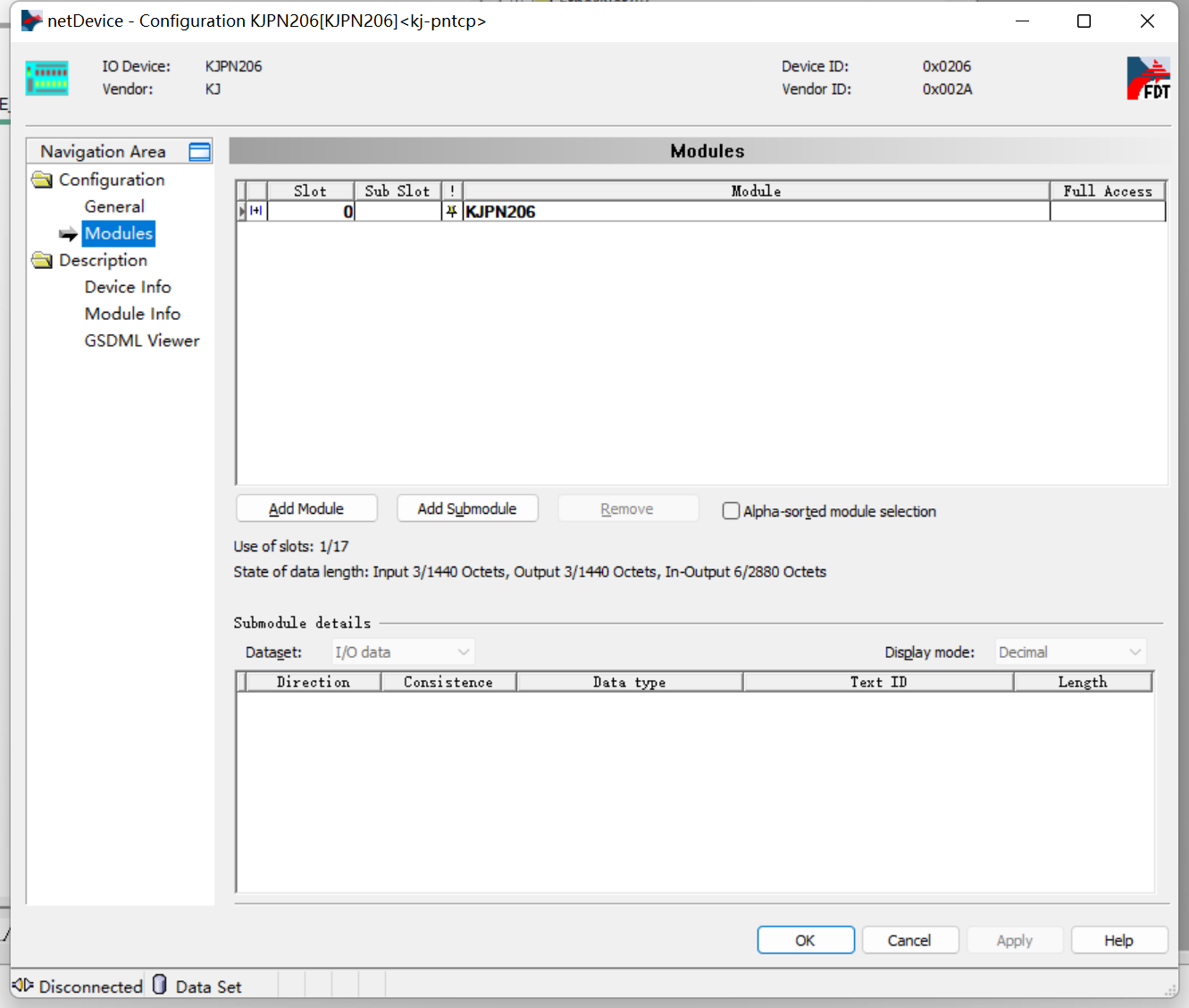
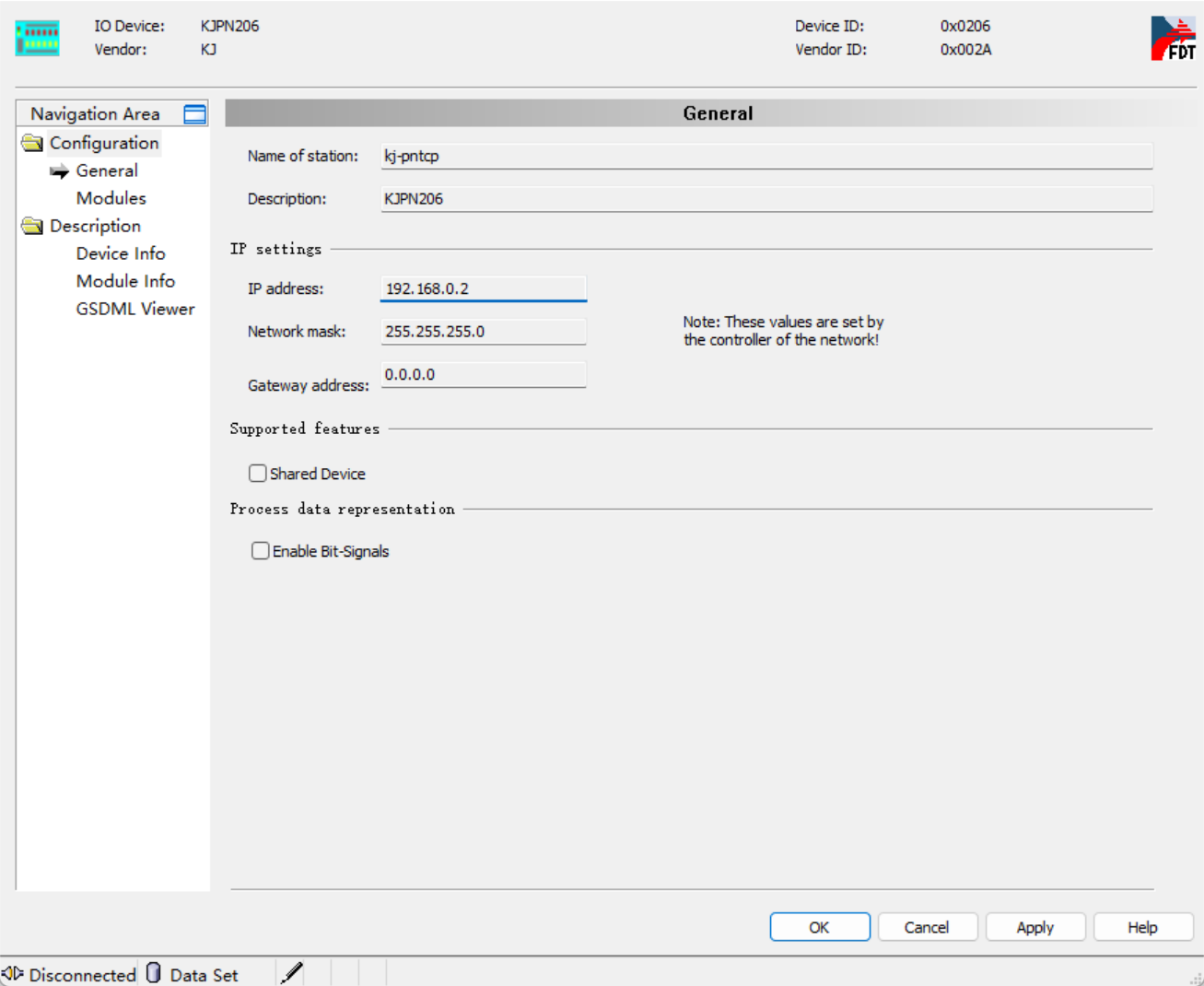
16、點擊Add Module添加Profinet轉ModbusTCP網關的輸入輸出長度,設置Profinet轉ModbusTCP網關的IP地址;
17、組態好之后導入到DCS中即可正常使用,對指定的輸入輸出地址進行讀寫即可。
審核編輯:湯梓紅
-
機器人
+關注
關注
210文章
28224瀏覽量
206586 -
MODBUS
+關注
關注
28文章
1765瀏覽量
76844 -
網關
+關注
關注
9文章
4313瀏覽量
50964 -
Profinet
+關注
關注
6文章
1069瀏覽量
23330
發布評論請先 登錄
相關推薦
profinet轉ethernet網關連接發那科機器人配置案例

Modbus TCP轉Profinet網關連接脈沖電源通訊配置案例
Modbus轉profient網關連接Smart PLC實現Profinet轉modbus協議轉換
Profinet轉Modbus TCP網關連接搬運機器人配置案例
ModbusTCP轉Profinet網關連接脈沖電源通訊配置


Profinet轉Modbus TCP網關連接搬運機器人配置案例

移通創聯ModbusTCP轉Profinet網關連接組態王服務器配置案例

Profinet轉ModbusTCP網關連接DCS與發那科機器人
ModbusTCP轉Profinet網關連接施耐德PLC配置案例

300PLC通過ModbusTCP轉Profinet網關連接組態王
ModbusTCP轉Profinet網關連接組態王從站配置案例
Profinet轉ModbusTCP網關連接DCS與發那科機器人
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析






 工商網監
工商網監
評論