 應用于機器人3D感知的高精度LiDAR與電機驅動解決方案
應用于機器人3D感知的高精度LiDAR與電機驅動解決方案
應用于機器人3D感知的
解決方案
機器人想要進行自主移動,便需要擁有3D感知(3D perception)功能,必須利用各種的傳感器來實時掌握機器人在空間中的位置,其中以LiDAR(激光雷達)能夠提供高精度的位置傳感,最受到業界的重視。此外,機器人也需要通過電機驅動,來執行自身或四肢的精準移動。本文將為您介紹LiDAR技術的發展,以及由ROHM推出的LiDAR與電機驅動解決方案。
激光雷達帶動新服務的創新
近未來的AI機器人是指通過給自主移動機器人(AMR)增加3D感知功能,使機器人能夠在三維空間中判斷自己的位置并識別自身的動作,從而實現高級自主移動和各種運動控制的機器人。AMR要進行各種運動控制,不僅需要確認自身所處位置,還需要進行實時3D感知數據處理(比如對周邊物體進行分類、進行物體跟蹤等),因此使用LiDAR和攝像頭的技術架構已經成為業界主流。
隨著實時3D感知數據量的不斷增加,構建深度學習模型已經成為當前的技術發展趨勢。由于深度學習模型的學習環境通常是處于理想條件下的,因此能夠準確地進行狀態推斷。然而,在機器人的實際工作環境中,難免要面對不完整的傳感器信息和復雜的移動控制等問題。
機器人用的LiDAR模塊對LD(激光二極管)的分辨率要求很高,因此對所用LD的性能主要有以下兩項要求,首先光源的尺寸要盡量小,其次則是光束的發散角要盡量小。通常,從半導體激光二極管發出的光具有一定的發散角,因此,需要使用準直透鏡將光變為平行光(圖1)。
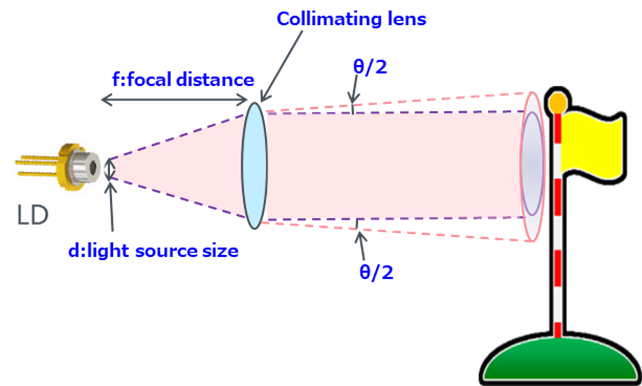
圖1:光源大小對光斑尺寸的影響
然而,準直透鏡并不能將半導體激光二極管發出的光完全轉變為平行光。通常,從透鏡射出的光束具有一定的發散角(θ),該發散角是由光源尺寸和透鏡焦距這兩個參數所組成的關系式(公式1)決定的。
公式1:θ~ d / f
(d表示光源大小,f表示透鏡焦距)
要想實現高分辨率,就需要進一步減小從透鏡射出的光束的發散角(圖1中的θ)。關于LD的光源尺寸,因為從透鏡射出的光束的發散角(θ)和LD的光源尺寸(d)呈正比例,所以如果d減小50%,則θ也會減小50%。關于光束發散角,從公式1可以看出,焦距越長,從透鏡射出的光束的發散角越小,因此,最好選用發散角小的LD。
圖2是表示LD光束發散角為20deg和25deg時的焦距差異的示意圖。在透鏡直徑相同的情況下,如果使用光束發散角為20deg的LD,則可以選擇焦距長約25%的透鏡。這樣,從透鏡射出的光束的發散角(θ)也可以減小20%左右,光斑尺寸也能縮小20%。
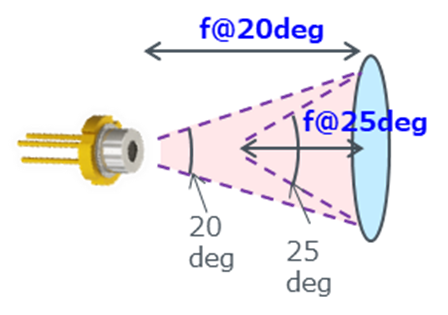
圖2:光束發散角與焦距的關系(20deg和25deg時的比較)
可實現自主工作的AI機器人
高精度LiDAR解決方案
針對這些實際工作環境問題,ROHM推出了LiDAR解決方案,由具有優異的邊緣檢測能力且可輸出高精度點云數據的激光二極管、可以高速驅動激光二極管的GaN HEMT、以及用來驅動GaN HEMT的柵極驅動器IC構成,通過能夠獲取穩定的3D感知數據的端到端模型,可實現自主工作的AI機器人。
ROHM用于LiDAR的半導體激光二極管產品陣容非常豐富,其中包括實現業界超小光源尺寸(35μm ×10μm)的RLD90QZWA、以及光源尺寸為270μm ×10μm的大功率RLD90QZW8等多種產品(表1)。
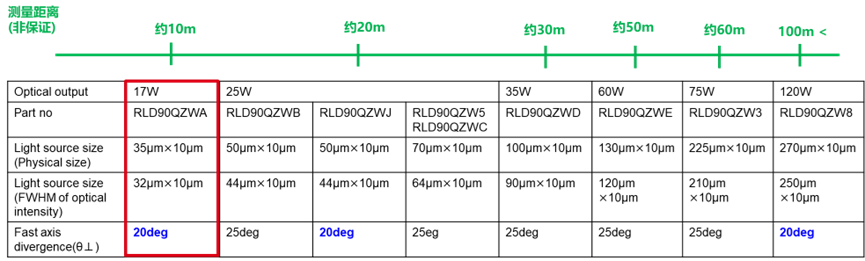
表1:用于LiDAR的ROHM LD產品陣容
將產品用在機器人應用中時,其關鍵在于對周邊10~20m左右的環境的準確感知。對于需要進行近距離精準測距的機器人應用,推薦采用2022年投入量產的產品RLD90QZWA,這款產品的光源尺寸達到了業界超小水平,只有35μm×10μm大小,而且光束發散角(快軸方向)為20deg。與以往產品RLD90QZW5(光源尺寸70μm×10μm,θ⊥=25deg)相比,其透鏡出射光束的發散角縮小了60%。選用這款RLD90QZWA,不僅可以選擇焦距更長的透鏡,還能夠獲取更高精度的點云數據。
提升開發速度的GaN HEMT
激光驅動參考設計
通常,LiDAR多采用ToF(Time of Flight,飛行時間)方式的測距方法。ToF方式是通過測量從光源發射出來的光經目標物反射后返回至接收器所用時間,再計算出距離的一種測距方法。如果脈沖寬度過大,則接收器接收到的光脈沖信號容易混疊在一起,這樣就難以區分距離接近的兩個以上的目標物了。因此,要提高分辨率,就需要降低脈沖寬度。ROHM為了構建能夠通過窄脈沖信號獲得更高精度點云數據的系統,開發出將激光二極管驅動中的關鍵 — GaN HEMT(EcoGaN)與GaN HEMT驅動用的單通道高速柵極驅動器IC相結合的參考設計 ―“REFLD002”,并已在ROHM官網上公布了相關的設計信息。

圖3:GaN HEMT激光驅動參考設計“REFLD002”
要想充分激發出GaN HEMT可高速驅動的特性,就必須使用高速柵極驅動器進行驅動。ROHM開發的GaN HEMT驅動用的單通道高速柵極驅動器IC“BD2311NVX-LB(工業設備用)/-C(車載用)”已經開始提供樣品。該款產品采用的驅動方式在保持高轉換速率的同時,還可以減少10%左右的過沖,領先于業內的同類產品。此外,普通GaN HEMT的柵極-源極間耐壓為6V,而ROHM的EcoGaN 則達到了8V。基于這些產品優勢,用戶將不必再擔心驅動電路開關時的過沖所造成的破壞,電路設計將會變得更加容易。
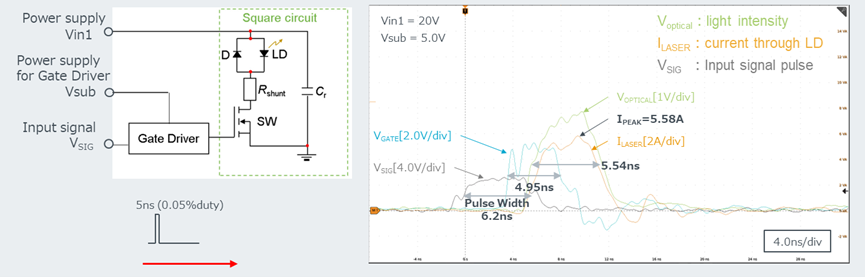
圖4:激光二極管“RLD90QZWA”的驅動波形
另外,ROHM官網上還公開了一款免費仿真工具“ROHM Solution Simulator”,并配有相應的仿真電路,用戶可以利用該仿真工具輕松地確認不同電路常數下的波形變化情況,這對于前期的設計研究會有很大幫助。
不僅如此,ROHM的官網上還公開了產品單體的應用指南、仿真模型(SPICE模型、Ray數據)以及PCB庫數據。用戶通過直接使用參考設計,并有效利用參考設計的電路仿真及相關產品數據,可以大幅削減設計工時和評估工時,大大縮短相關產品導入市場的周期。
小型高效的電機驅動解決方案
機器人應用與電機驅動密切相關,由ROHM推出的電機驅動解決方案中,包括了由機器人自主移動相關的輪系和機器人的各種運動控制相關的控制器的電機驅動中不可或缺的MOSFET,以及用來驅動MOSFET的柵極驅動器IC構成,具有小型、高效的特點。
對于用電池驅動的自主移動機器人而言,主流的電源方案為DC24~72V電源,而對于工業機器人而言,則主要使用DC48V電源。隨著AI、傳感(圖像識別)以及驅動能力提升等技術的發展,機器人的功能不斷升級,相應地,就需要消耗更多的電力。在這種背景下,功率轉換技術的問題日益凸顯,并已成為亟待解決的課題,而AI機器人技術領域的功率轉換效率也成為一項至關重要的因素。
ROHM通過將可驅動外置Nch MOSFET、非常適用于DC48V應用的電機驅動、耐壓為100V的高低邊柵極驅動器IC“BD2320UEFJ-LA”與采用了銅夾片結構、封裝小巧、功率損耗低的Nch MOSFET“RS6xxxxBx/RH6xxxxBx系列”相結合的解決方案,降低了開關損耗和導通損耗,非常有助于提高應用產品的工作效率。

圖5:ROHM的柵極驅動器IC和Nch MOSFET產品封裝示意圖
舉個例子,當在工業設備用的電源評估板上比較電源效率時,在穩態工作時的輸出電壓范圍內,RS6xxxxBx/RH6xxxxBx系列的電源效率在峰值時高達95.01%。
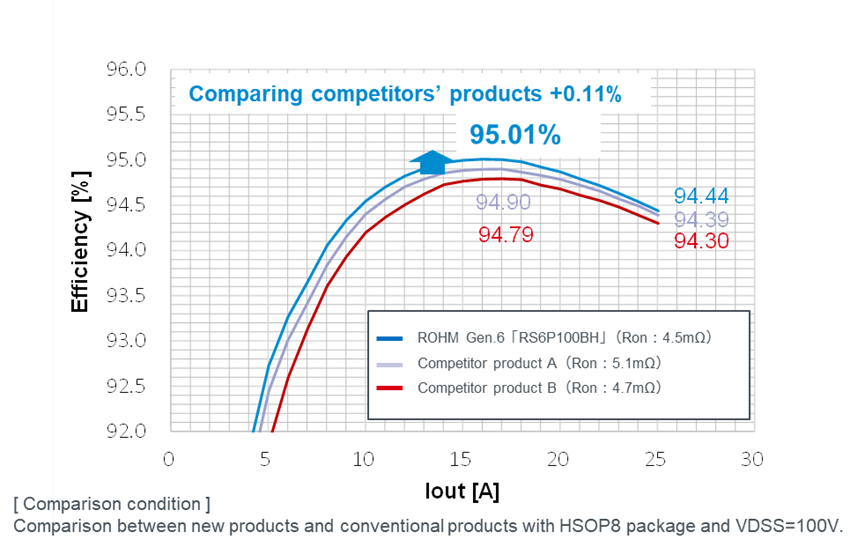
圖6:RS6xxxxBx/RH6xxxxBx系列與普通產品的效率比較
結語
機器人搭配3D感知的LiDAR解決方案,再結合上AI技術,將使機器人應用邁向新的世代。ROHM針對AI機器人技術領域的高級自主移動和各種運動控制所用的LiDAR模塊,推出了ROHM LiDAR解決方案,通過將擁有業界超小光源尺寸的激光二極管和可高速驅動激光二極管的GaN HEMT(EcoGaN),以及用來驅動GaN HEMT的柵極驅動器IC組合起來,助力構建能夠獲得更高精度點云數據的系統。
另外,ROHM還推出了電機驅動解決方案,通過將非常適用于電機驅動的高低邊柵極驅動器IC與采用了銅夾片結構、封裝小巧、功率損耗低的Nch MOSFET相結合,助力應用產品進一步提高工作效率。不僅如此,ROHM還在官網上公開了相關的參考設計以及免費的仿真工具“ROHM Solution Simulator”,有效利用這些資源可以幫助用戶削減設計工時和評估工時,大大縮短相關產品導入市場的周期,將會是相關機器人應用的理想選擇。
審核編輯:湯梓紅
-
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
電機驅動
+關注
關注
60文章
1208瀏覽量
86630 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189625 -
LIDAR
+關注
關注
10文章
323瀏覽量
29364
原文標題:【技術干貨】應用于機器人3D感知的高精度LiDAR與電機驅動解決方案
文章出處:【微信號:艾睿電子,微信公眾號:艾睿電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
即插即用的自動駕駛LiDAR感知算法盒子 RS-Box
Voxel 3D 飛行時間傳感器機器人視覺參考設計
拆開工業機器人,讓你見識機器人驅動系統中的電機種類
拆開工業機器人,讓你見識機器人驅動系統中的電機種類
高精度3D掃描如何實現?
避障機器人電路設計解決方案
高精度傳感器如何在創造機器人的自然動作中發揮作用?
基于Arduino的3D打印2輪機器人
奧比中光全棧式3D方案助力機器人視覺進化
如何實現高精度的3D感知
高精度3D視覺技術,助力工業機器人實現汽車零部件高效上下料
新品 | Bumblebee X系列用于高精度機器人應用的新型立體視覺產品






 工商網監
工商網監
評論