") 使用RecurDyn+EDEM聯(lián)合仿真實(shí)現(xiàn)虛擬樣機(jī)工程化模擬
使用RecurDyn+EDEM聯(lián)合仿真實(shí)現(xiàn)虛擬樣機(jī)工程化模擬
作者 | 郭老師 仿真秀優(yōu)秀講師
首發(fā) |仿真秀App
導(dǎo)讀:挖掘機(jī)完成各種工作任務(wù),其承受著各種復(fù)雜多變的載荷。由于挖掘機(jī)作業(yè)條件惡劣,受載情況十分復(fù)雜,導(dǎo)致挖掘阻力難以確定,工作裝置各鉸點(diǎn)所承受的動(dòng)態(tài)載荷也很難準(zhǔn)確獲得,給結(jié)構(gòu)強(qiáng)度的準(zhǔn)確分析預(yù)測帶來了困難。基于多體動(dòng)力學(xué)仿真、離散元仿真模擬、預(yù)測反鏟挖掘機(jī)在進(jìn)行挖掘作業(yè)時(shí)鏟斗端所受的挖掘阻力以及機(jī)臂的應(yīng)力應(yīng)變,為下一步的挖掘機(jī)鏟斗結(jié)構(gòu)優(yōu)化、工作裝置鉸點(diǎn)優(yōu)化提供理論基礎(chǔ)。
一、工程車輛仿真的關(guān)鍵技術(shù)
以某挖掘機(jī)為研究對(duì)象,通過顆粒動(dòng)力學(xué)分析獲得較為精確的挖掘阻力,為動(dòng)臂結(jié)構(gòu)強(qiáng)度的分析提供加載依據(jù)。
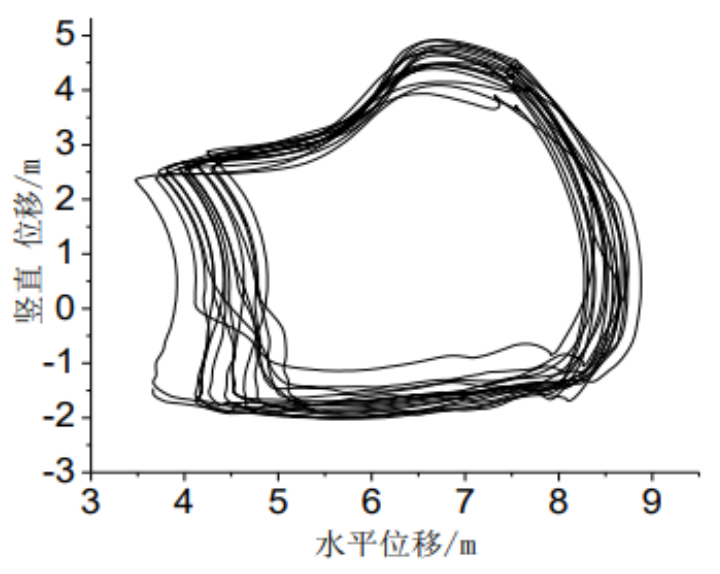
1、根據(jù)挖掘機(jī)的幾何參數(shù)建立三維模型,實(shí)測挖掘機(jī)不同物料下的作業(yè)實(shí)驗(yàn)、然后以動(dòng)臂、斗桿和鏟斗油缸位移變化曲線作為驅(qū)動(dòng),模擬真實(shí)的挖掘過程,獲得鏟斗軌跡曲線;
2、通過RFlex對(duì)其動(dòng)臂進(jìn)行柔性化,賦予真實(shí)的材料參數(shù),根據(jù)仿真結(jié)果,查看動(dòng)臂的應(yīng)力應(yīng)變,同時(shí)也可獲得疲勞壽命;
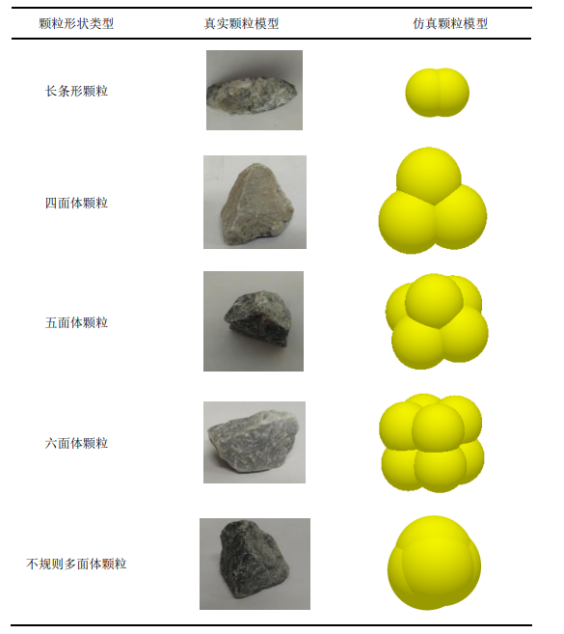
3、通過離散單元法建立挖掘介質(zhì)的顆粒模型,設(shè)置顆粒工廠和其他求解參數(shù),模擬鏟斗在挖掘時(shí)的真實(shí)工況,以此求得鏟斗在挖掘不同介質(zhì)時(shí)各個(gè)方向所受的挖掘阻力。
二、工程車輛仿真分析
1、RecurDyn
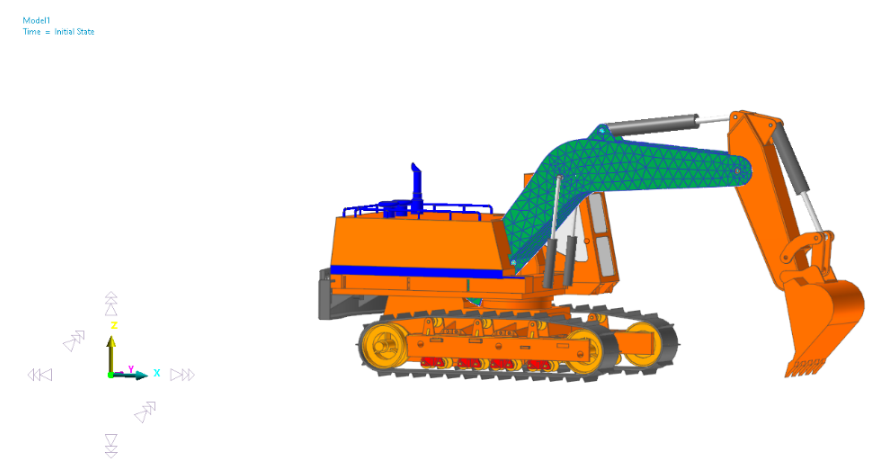
建立挖掘機(jī)虛擬樣機(jī)模型,不考慮實(shí)際挖掘機(jī)挖掘作業(yè)時(shí)機(jī)體的行走、回轉(zhuǎn)、平掃、卸料工況。因此在進(jìn)行運(yùn)動(dòng)學(xué)仿真時(shí),在不影響仿真結(jié)果的情況下,保證仿真速度、提高仿真效率,利用約束、柔性化命令對(duì)其進(jìn)行模型進(jìn)行處理,利用AKISPL將實(shí)驗(yàn)采集得到的三組油缸活塞桿的時(shí)間位移數(shù)據(jù)轉(zhuǎn)化為時(shí)間速度數(shù)據(jù),如鏟斗軌跡下圖所示:
2、EDEM
EDEM是目前應(yīng)用十分廣泛的一款離散單元法軟件,主要是用來對(duì)工業(yè)中粒子進(jìn)行仿真分析處理。可以較為準(zhǔn)確地模擬各種非球形顆粒,同時(shí)支持多種類型的CAD文件導(dǎo)入,擁有與其他分析軟件兼容的接口, 可以用來實(shí)現(xiàn)顆粒與流體、機(jī)械等學(xué)科的耦合仿真分析。比如:
3、結(jié)果分析
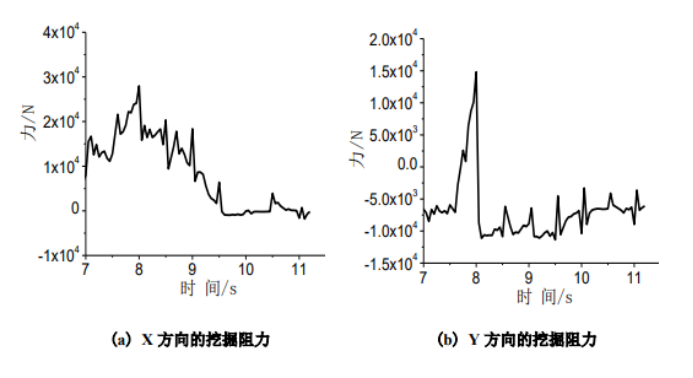
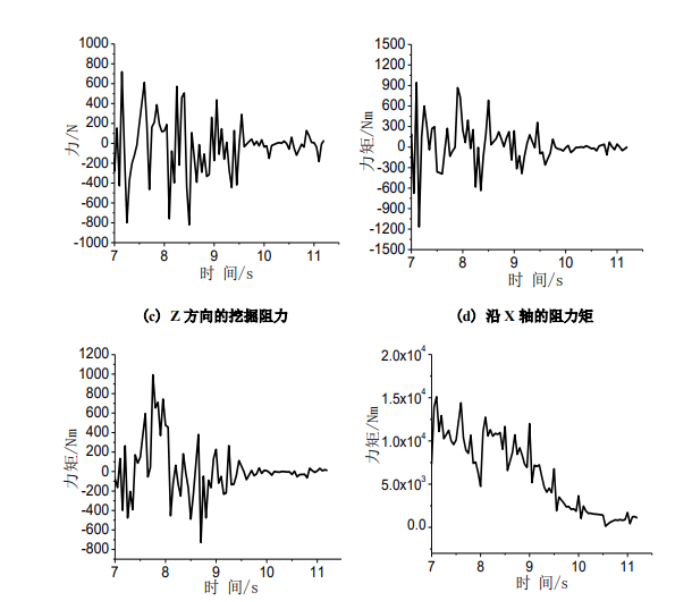
(1)阻力分析,通過仿真求解可以得到鏟斗在作業(yè)時(shí)受到的挖掘阻力,分別是 X、Y、Z 三個(gè)方向的挖 掘阻力和沿 X、Y、Z 軸的阻力矩
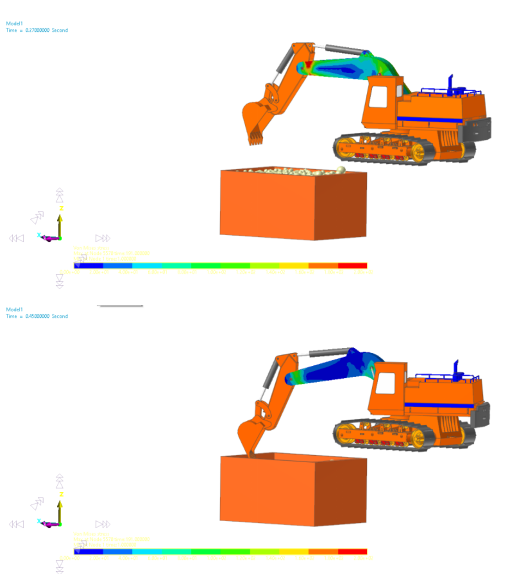
(2)應(yīng)力分析,通過剛?cè)狁詈希梢垣@得動(dòng)臂在挖掘過程中的實(shí)時(shí)應(yīng)力變化,獲得易發(fā)生疲勞磨損的的部分,可對(duì)后期結(jié)構(gòu)優(yōu)化,壽命預(yù)測提供基礎(chǔ)
審核編輯:湯梓紅
-
仿真
+關(guān)注
關(guān)注
50文章
4048瀏覽量
133431 -
三維模型
+關(guān)注
關(guān)注
0文章
49瀏覽量
13102
原文標(biāo)題:教你RecurDyn+EDEM聯(lián)合仿真,實(shí)現(xiàn)虛擬樣機(jī)工程化模擬
文章出處:【微信號(hào):sim_ol,微信公眾號(hào):模擬在線】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
[下載]想了解多體動(dòng)力學(xué)軟件嗎?有教程分享及免費(fèi)試用下載
基于LabVIEW的虛擬示波器仿真實(shí)驗(yàn)設(shè)計(jì)
虛擬仿真實(shí)訓(xùn)系統(tǒng)是什么?
嵌入式系統(tǒng)工程化設(shè)計(jì)的相關(guān)資料分享
虛擬仿真三維復(fù)雜路面的實(shí)現(xiàn)
Multisim模擬電路仿真實(shí)驗(yàn)
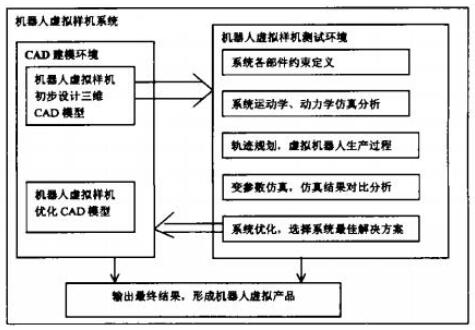
工業(yè)機(jī)器人虛擬樣機(jī)系統(tǒng)的研究
CSS工程化實(shí)踐成果分析
C與VB語言聯(lián)合在proteus上仿真實(shí)例的工程文件免費(fèi)下載
嵌入式系統(tǒng)工程化設(shè)計(jì)

心肺復(fù)蘇及AED虛擬仿真實(shí)驗(yàn)系統(tǒng)
虛擬仿真裝配技術(shù)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論