 pwm控制的基本原理
pwm控制的基本原理
本應用程序注釋詳細介紹零露性脈沖- Width modult (PWM) 控制(ZDP) 。TMZDP TM是一種MPS專有、固定頻率電力供應控制方法,它比普通固定頻率控制方法(例如電壓模式控制或峰值當前模式控制)改進了瞬時反應。
Introduction
MPS的零緩期PWM(ZDP)TM控制為電力供應設計提供了許多好處,包括快速瞬時反應和穩定的開關頻率(f)SW描述一些共同的控制地形(電壓模式控制、當前模式控制、以及定時[COT]控制),以建立基準,與ZDP進行比較。TM然后是ZDPTM此外,還詳細介紹了其益處。
Conventional Control Methods
電壓模式控制
電壓模式控制是最簡單的控制方法之一。圖1顯示電壓模式控制。
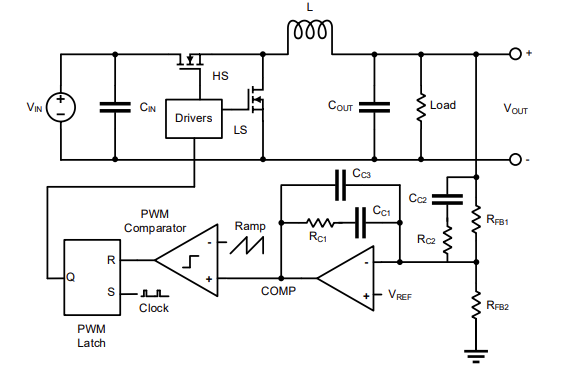
Figure 1: 電壓模式控制
反饋電壓和參考電壓(V)之間的差異FB- 五級REF放大以生成錯誤信號(通常為計算電壓) 。錯誤信號與電站級的電壓斜坡作比較,以生成電站值周期。 電壓模式控制需要高 ESR 電容器或第3類補償來穩定系統。控制收益也與輸入電壓成正比(V)。IN這使跨頻率隨著V而變化。IN為避免這種情況,坡道電壓應與V成比例IN.
峰值當前模式控制
峰值當前模式控制是汽車動力供應最常用的控制方法之一。 圖2顯示峰值當前模式控制。
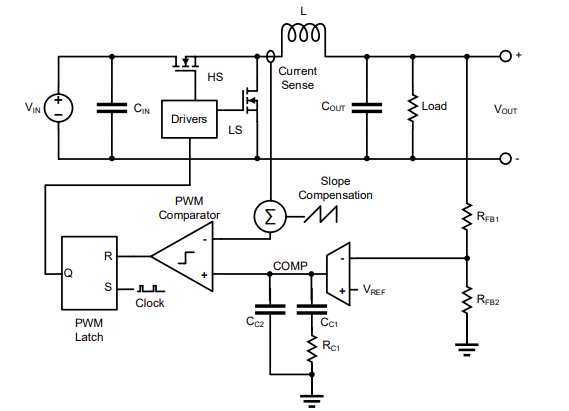
Figure 2: 峰值當前模式控制
類似于VV電壓模式控制FB- 五級REF放大以生成錯誤信號。 峰值當前模式控制將錯誤信號比作感應器當前信號( I) 。L))),它通常通過鏡像MOSFET、感應阻力或無損流感電路被感應到。通常,峰值當前模式地形包括一個坡度補償信號,以確保穩定值周期超過50%。L在循環周期中,賠償的復雜性降低,只需要第2類賠償。這也消除了控制收益影響V。IN,這意味著整個五星年的跨重疊頻率保持相對穩定。IN范圍。
當前信號在轉換過渡期間的峰值當前模式地形表中不穩定,當高端MOSFET(HS-FET)打開時,PWM參照器應在短期內空白。 這導致更長時間的最低時間( t) 與電壓模式控制、傳統COT或ZDP相比TM.
在MPS設備,如MPQ2167、MPQ4436、MPQ4323和MPQ4430中,實施了峰值當前模式控制。
傳統定時固定(COT)控制
在高性能應用中,傳統的COT控制用于提高短期性能,圖3顯示了傳統的COT控制。
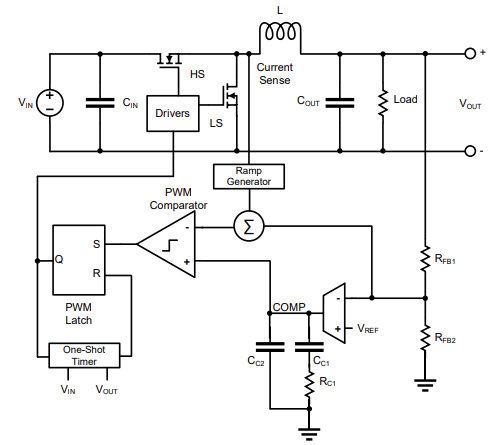
Figure 3: Traditional COT Control
傳統COT控制與V比較FB直接對 V 直接對 VREF觸發脈沖上的脈沖。只有反饋信號波波與I相聯時,才可能發生這種情況。L。這可能來自輸出電容器 ESR、置于感應器上方的斜坡注射電路或內部生成的合成斜坡。FB跌落到 V 下REF或錯誤信號或錯誤信號,即生成時脈沖并輸入大門驅動器。在大瞬時中,通過內部最短時間生成連續實時脈沖,以恢復輸出電壓(V)OUT)快速。與電壓模式控制和當前模式控制相比,這提供了更好的負載瞬時反應。
錯誤放大器(EA) 可以用作生成與 V 比較的錯誤信號的緩慢路徑FB通過第2類補償,可以實現傳統的COT控制,從而減少COT地形學系統的組成部分計數。
由于連續的實時脈沖可在負載瞬時反應時發生,fSW這可能不適合在EMI性能更令人關切的情況下申請,例如工業或汽車電子產品,而EMI要求嚴格,以減少系統中的對口聯系。
在MPS設備(如MPQ2179、MPQ2172和MPQ3431A)中實施了COT控制。
Zero-Delay PWM Control (ZDPTM)
建筑結構結構
零露天PWM(ZDP)TM控制達到與傳統的COT控制相同的負載瞬時性性能,但采用固定頻率辦法。TM.
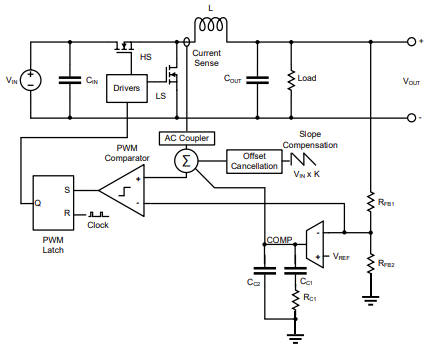
Figure 4: 零露天PWM(ZDP)TM) Control
類似于傳統的KOT控制,ZDPTM將反饋節點直接連接到PWM比較器,從而創建了通往PWM比較器的快速路徑,從而繞過EA。 這一快速路徑快速改變驅動 HS-FET 和 低端MOSFET (LS-FET) 以補償 V 的值勤周期OUT在不向上或向上或向下提高補償值的情況下波動。例如,當 V 時OUT由于大量負荷瞬變而減少,在下一個周期,任務周期在下一個周期期間增加,以便向輸出電容器提供恢復V的動力OUTZDP 津巴布韋民主黨TM在不調整 f 的情況下實現此目標SW(見圖5)。
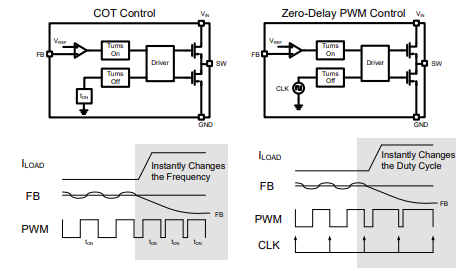
Figure 5: Traditional COT Control vsZDP 津巴布韋民主黨TM
與傳統的 COT 控制類似, 使用 EA 的慢路徑會提高調控精度。 慢路徑的使用( V)FB- 五級REF創建錯誤信號。該信號以一個與 AC 連接的當前信號和一個斜坡補償坡坡坡。然后將總和信號與 V 比較。FB中輸入一個使用固定頻率時鐘作為重置信號的 PWM 插件塊。ZDPTM與第3類補償相比,第2類補償可以節省設計周期的時間,從而實現循環穩定性。
ZDPTM與峰值當前模式控制不同的是,帶ZDP的峽谷流感測TM不需要空白時間, 因為當 LS- FET 打開 LS- FET 時可以感應當前時, 不需要空白時間。 通過消除空白時間, 降低 t通 使該裝置能夠在較低的值班周期內運行,因為V值較大。IN:VOUT比率,和較高的fSW.
ZDPTM在MPS設備中實施,如MPQ4340、MPQ4371和MPQ2286。
模擬結果(1)
圖6顯示MPQ4340 瞬時模擬模擬結果。
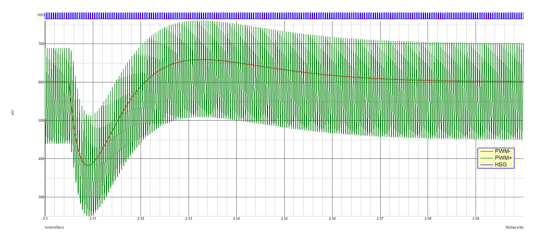
Figure 6: MPQ4340 Load Transient Response
在PWM-是反饋信號的地方;PWM是comp信號、AC結合的當前感知和斜坡補償的總和;HSG是高端大門啟動信號。
VOUT在從0A到4A的輸出負載變化引起的低射頻小小射線和小小小射速超射后迅速恢復。OUT回收量與PWM-成比例。
一旦PWM超過PWM-(見圖7),HSG即開啟(見圖7)。
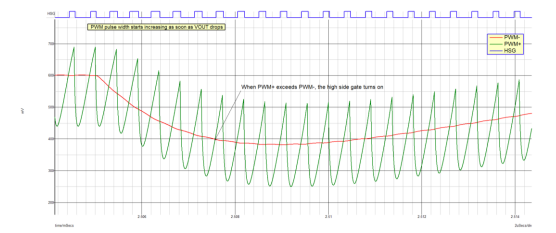
Figure 7: HSG Turns On during MPQ4340 Load Transient Response
曾經五OUT液滴,高SG脈沖寬度增加,為輸出提供更多能量并糾正 VOUT在負載步驟之后。
圖8顯示當負載增加時,值勤周期如何變化,同時仍保持恒定的fSW(見圖8)。
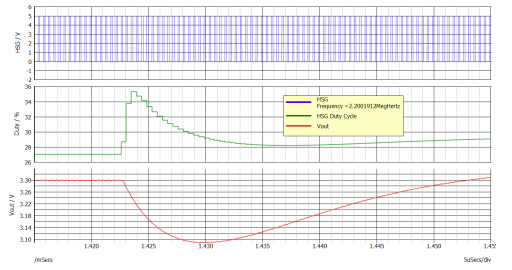
Figure 8: Duty Cycle during MPQ4340 Load Transient Response
圖8中的綠色曲線圖8顯示7頁圖6和圖7圖7所示的HSG曲線的值勤周期(百分比),在幾個轉換周期中,值勤周期從27%增加到35%,以減少五級。OUT允許V(由負載增加引起的),并允許V(由負載增加引起的)OUT圖8中的藍色曲線以恒定 f 表示重債窮國。SW(2.2MHz) 整個載荷瞬時操作。
為觀察控制計劃的穩定性,制作了模擬預兆地塊(見圖9)。
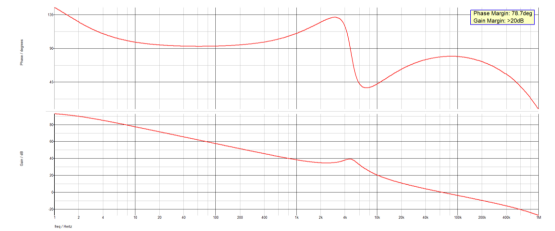
Figure 9: MPQ4340 Bode Plot
相位差和增益幅度超過大多數設計目標。 交叉頻率約為63kHz。 由于快速路徑, 大型信號瞬時反應優于63kHz交叉頻率的預期效果。 通常通過傳統的COT控制, 預兆圖無法準確反映與傳統當前模式控制裝置預兆反應相比, 負載瞬時反應的改善。
注:
(1) (1) 五IN= 12V,V = 12V,VOUT= 3.3V, 0A至4A負載級,50A/μs, fSW=2.2MHz,L=1微克H,COUT= 2 x 22微克F,在 MPQ4340 上測試模擬電容器電壓降壓。
與其他固定頻率控制方法(例如,電壓調控模式和峰頂當前模式控制)相比,零調值PWM(ZDP)TM控制快速路徑 控制快速路徑 大大改進了瞬時反應。圖10顯示 ZDP 之間的瞬時比值為 0A 到 3. 5A 。TM(MPQ4340)和峰值當前模式控制(MPQ4430)。MPQ4340和MPQ4430具有相同的電導、電容器和fSW.
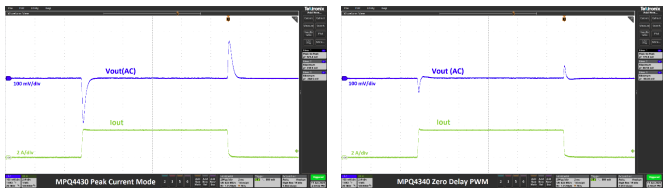
Figure 10: Load Transient with ZDPTM vs. 峰值當前模式控制
波形顯示523米VPK-PKMPQ4430 和 a 170mV 的 MPQ4430 和 a 170mV 瞬時式負載PK-PK對 MPQ4340 來說, MPQ4340 的瞬時反應要比 MPQ4430 的瞬時反應好得多。 這樣用戶就可以在改進瞬時性能的同時使用較少的輸出電容器。
允許非常短的 t通 在使用峰值當前模式控控控的裝置中使用峰值當前模式控件的裝置中, MPQ4340 最長的 MPQ4340 t通 允許 MPQ4340 將擴大的汽車電池電壓(至多18V)直接轉換為1.8V,同時切換到AM波段以上并帶有頻譜(FSS)。
固定頻率允許ZDPTM提供極佳頻率穩定性。 帶有ZDP的裝置TM(例如,MPQ4340)也可以與外部時鐘同步,也可以與FSS同步使用。TM可用于具有嚴格的EMC要求的應用,如汽車應用。
Conclusion
PWM(ZDP)TM控制能提高與傳統峰值當前模式控制相比的負負瞬時性能,同時在負瞬時保持固定頻率。TM從傳統的COT控制,它有波動 f 。允許該設備用于高f/SW利用ZDP對MPS產品進行模擬和硬件測試證明了這些效益。
審核編輯:彭菁
-
電力
+關注
關注
7文章
2121瀏覽量
50116 -
電壓
+關注
關注
45文章
5567瀏覽量
115607 -
硬件
+關注
關注
11文章
3260瀏覽量
66132 -
PWM控制
+關注
關注
7文章
194瀏覽量
26267 -
開關頻率
+關注
關注
2文章
88瀏覽量
21427
發布評論請先 登錄
相關推薦
單片機pwm控制基本原理詳解


PWM控制的基本原理
PWM控制的基本原理
詳解pwm控制基本原理,單片機pwm怎么用?資料下載

單片機pwm控制基本原理詳解
單片機pwm控制基本原理詳解





 工商網監
工商網監
評論