 識別并消除次諧波振蕩
識別并消除次諧波振蕩
識別并消除次諧波振蕩
簡介
DC/DC的不穩定是由多種因素造成的,例如補償參數不當或布局不足。本文將主要討論次諧波振蕩,這是一種當電流模式開關穩壓器具有連續電感電流且占空比超過 50% 時可能產生的不穩定形式,而這種振蕩會導致不穩定的電源。
為了解次諧波振蕩,我們以一個采用峰值電流控制模式的降壓電路為例,看看這些振蕩如何隨時間和頻率而變化。
時域次諧波振蕩
圖 1 顯示了一個采用峰值電流控制的降壓電路,該電路將誤差信號 (VC) 與電感電流信號 (IL) 進行比較。其中VC 為輸出電壓 (VOUT) 減去參考電壓 (VREF) 的差值。比較的結果將產生一個控制信號以驅動上下管MOSFET。
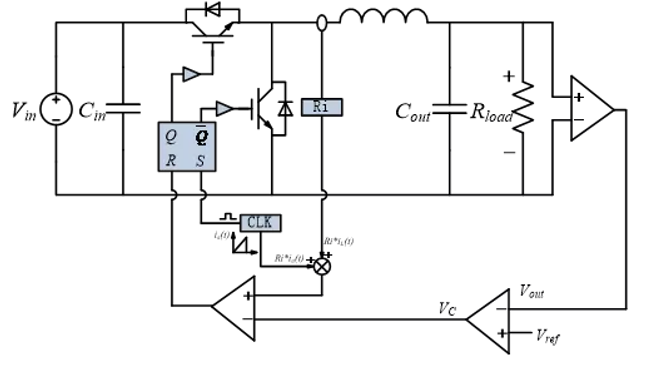
圖1: VC與IL的比較
圖 2 顯示了 VC與IL的交叉情形。藍線代表穩定條件下的 IL 信號和開關波形(SW),粉線則代表擾動后的 IL 信號和 SW 波形。波形中的?I0和 ?tON被定義為誤差值。從圖2可以看出,在占空比為30%時,擾動逐漸減小,系統趨于穩定。
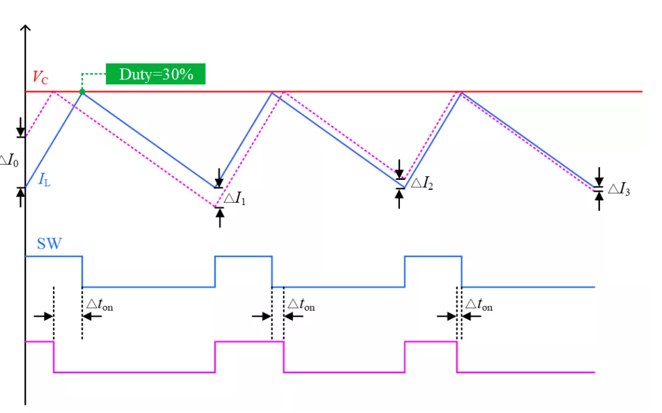
圖 2:占空比為30% 時相對穩定的 IL
圖 3 顯示出,當占空比增加到 70% 時,擾動逐漸增大,導致了系統的不穩定。
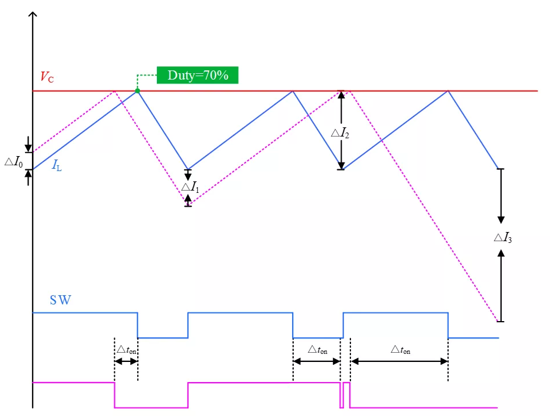
圖 3:占空比為70% 時不穩定的 IL
從圖 2 和圖 3可以推斷,50% 的占空比為擾動收斂和發散的邊界點。
邊界點也可以通過公式導出。在圖 4 所示的電感電流擾動波形上,我們先定義變量,用D 代表占空比,m1 和 m2 代表電感電流的上升和下降斜率,ic1和ic2為電感電流達到 VC 時的值。粉色虛線上的 ?iL(0)和 ?iLT(s)分別代表電感電流的起始值和結束值,而藍色實線上的 iL(0)和 iLT(s)分別代表擾動的起始值和結束值。
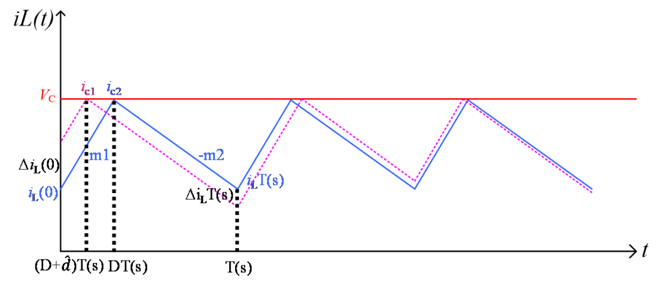
圖4: 電感電流的擾動波形
利用以上定義的變量,可以通過公式 (1) 來計算 ΔiLT:

例如,在第 n 個周期中,當D 小于一半(即占空比低于 50%)時,ΔiLT逐漸收斂為零;反之,如果占空比超過 50%,則?iLT發散。另外,干擾可以確定為次諧波振蕩,因為該值可以為正,可以為負,與 n 相關,而且變化率恰好是開關頻率的一半。
頻域次諧波振蕩
從頻域的角度也可以了解次諧波振蕩。根據圖 1 中采用峰值電流控制的降壓電路,可以得到圖 5的系統結構圖,由此導出由系統控制到輸出的開環傳遞函數。
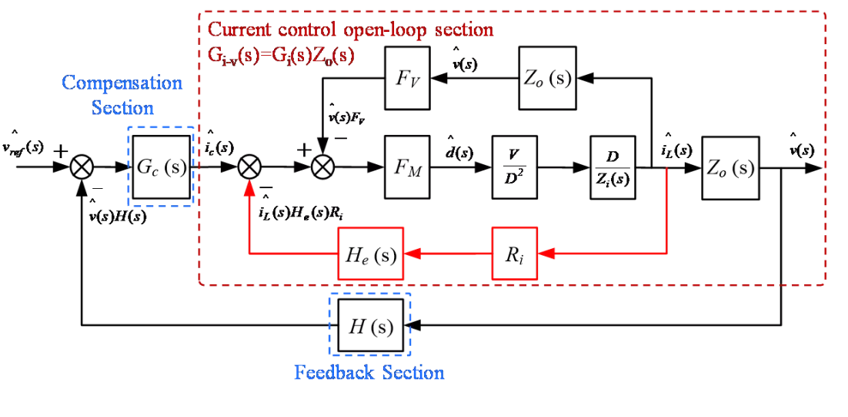
圖 5:峰值電流控制降壓電路系統中的開環傳輸
對輸出采用開環傳遞函數控制,輸入電壓 (VIN) 設置為 12V,開關頻率 (fSW) 設置為 400kHz,占空比按照波特圖變化。圖 6 顯示出,當占空比為 50% 和 67% 時,增益曲線在1/2開關頻率處有一個諧振峰值,而且相位曲線快速翻轉,表明發生了次諧波振蕩。這種現象會嚴重影響系統的穩定性。但是,當占空比為28%時,增益曲線和相位曲線均無異常。
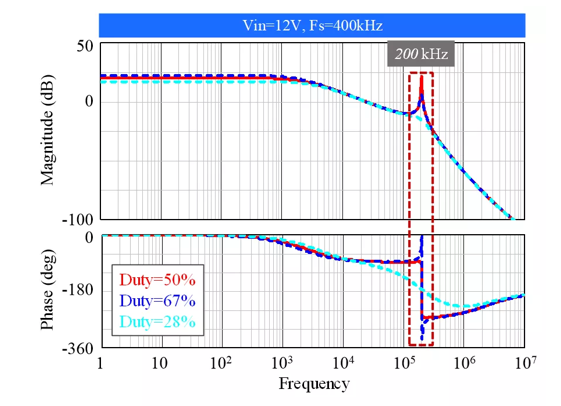
圖6: Gi-v(s)函數波特圖
消除次諧波振蕩
減少次諧波振蕩的方法有多種。圖 7 顯示的峰值電流控制功能框圖采用了鋸齒波電流補償法。這種方法將鋸齒波補償信號疊加在電感電流信號上,從而使VC 信號從恒定信號變為脈動斜坡信號。這個過程通常被稱為斜坡補償技術。
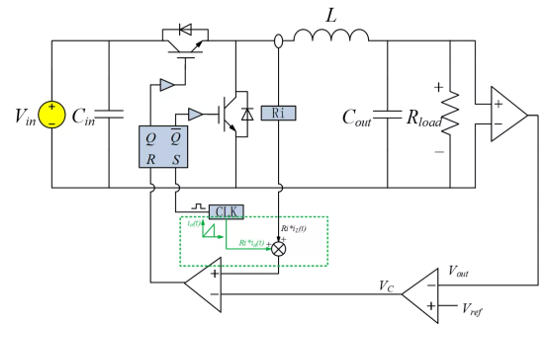
圖 7:加入鋸齒波電流補償
通過比較有斜坡補償和無斜坡補償時的情況,可以展示斜坡補償技術的抑制效果,如圖 8所示。
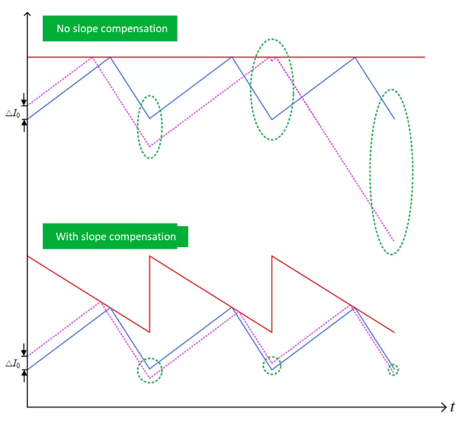
圖 8:鋸齒波電流補償的抑制效果
斜坡補償技術也可以通過數學推導和頻域進行分析。
斜坡補償技術的缺點
斜坡補償雖然可以抑制次諧波振蕩,但它也有缺點,在電源設計過程中需要考慮到,例如:
由于增加了斜坡補償,芯片的限流值將隨占空比的增加而逐漸減小
過大的斜坡補償會影響系統的動態性能
以MPQ4420A為例,這是一款內置功率 MOSFET 的高效同步降壓變換器。從圖 9可以看出,其占空比越大,限流點越小。
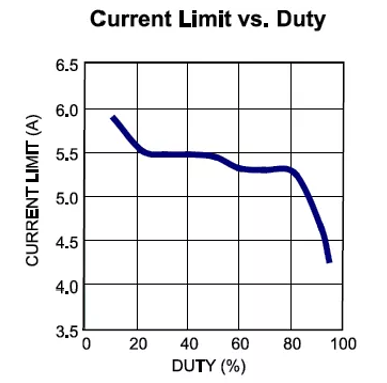
圖9: MPQ4420A限流點與占空比的關系
圖 10 顯示了帶斜坡補償的 Gi-v(s)函數,其中 Mc 是斜坡補償系數。補償系數越大,系統帶寬越小,系統動態響應就越慢。
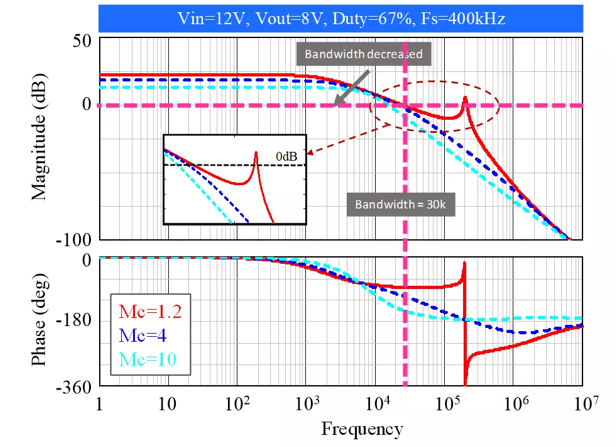
圖 10:帶斜坡補償的 Gi-v(s)波特圖
結論
上文表明,控制次諧波振蕩以維持開關電源的穩定性至關重要。在文章中,我們討論了如何通過時域和頻域來識別次諧波振蕩,還介紹了通過斜坡補償來減少次諧波振蕩的方法,當然它也有一些負面影響
MPS 的隔離式 DC/DC 電源模塊等產品可以提供先進的電源解決方案,保證DC/DC 的穩定性。
審核編輯:湯梓紅
-
MOSFET
+關注
關注
145文章
7093瀏覽量
212731 -
降壓電路
+關注
關注
13文章
165瀏覽量
59454 -
諧波
+關注
關注
7文章
810瀏覽量
41749
發布評論請先 登錄
相關推薦
斜率的傳遞函數:次諧波振蕩的理論解釋
三次諧波和五次諧波失真嚴重是由哪些原因造成的?
怎樣消除三次諧波對發電機的影響
如何消除5次和7次諧波
三次諧波是什么,三次諧波會造成哪些影響
淺談巴拿馬電源的諧波消除原理






 工商網監
工商網監
評論