 MagAlpha 角度傳感器的線性標準
MagAlpha 角度傳感器的線性標準
使用 MagAlpha 的側形結構時, 用戶需要考慮幾個標準才能達到高度線性輸出。 MagAlpha 角度傳感器有一個內置線性選項( 稱為“ BCT ”) , 來處理如下事實, 即傳感器所看到的磁場的2個正方形組件隨著磁鐵的發生革命而具有不同的振幅。 然而, 事實證明, 傳感器或磁性位置的某些不完善之處, 或磁性被磁化的方式, 可能產生無法通過 BCT 調整來彌補的錯誤。 本說明描述了哪些特征需要觀察, 以及人們能夠期望知道哪些不完善之處的線性。 它可以幫助指定機械和磁性容度 。
1.1 理想情況
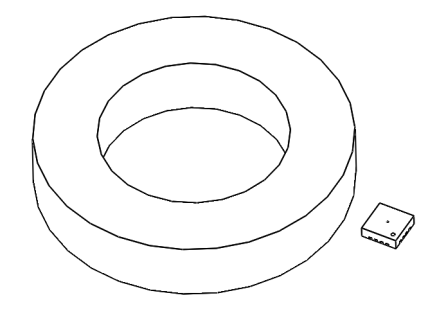
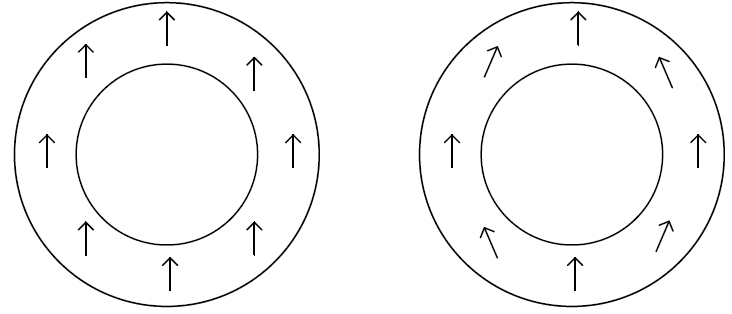
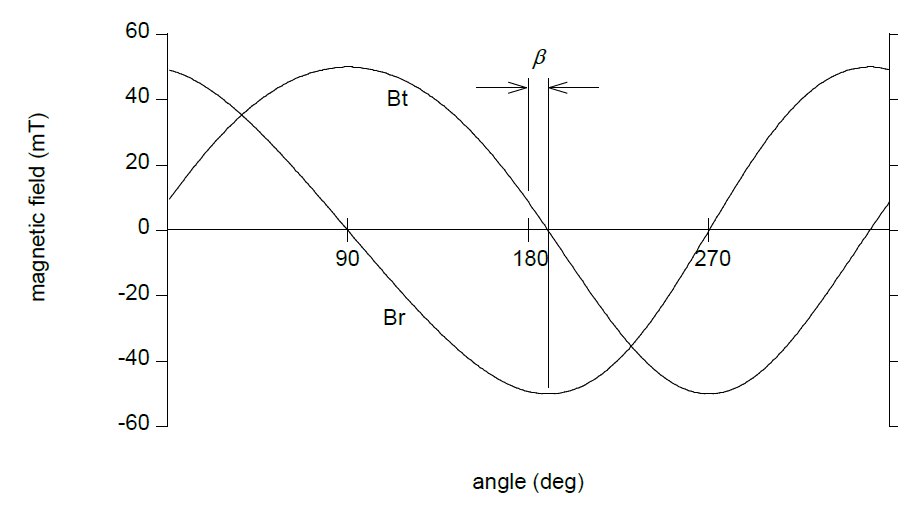
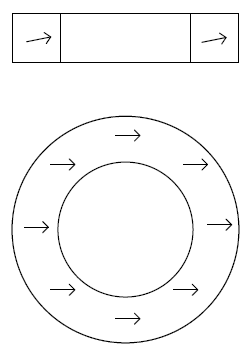
磁場,由一個帶統一磁化的有限圓形圓形圓軌圓形圓柱體產生的磁場(見圖1)以磁鐵為中心是角度的正弦函數。
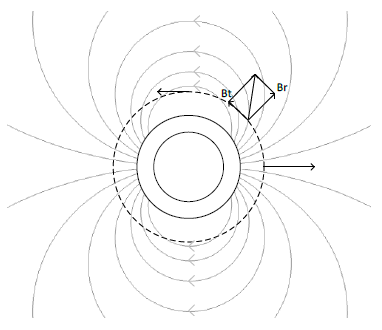
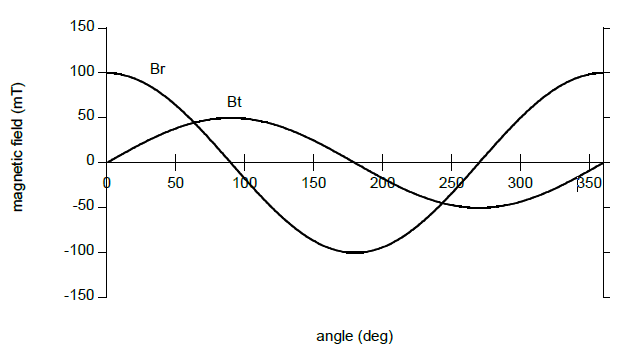
對于限定高度環,Br和Bt的振幅一般不相同:Br和Bt的分析表達式,例如,這里可以找到(Caciagli等人,《磁力學和磁材料雜志》456(2018)423-432))。不同的振幅導致非線性傳感器輸出(所謂的“電子”錯誤)。錯誤曲線基本上有一個第二調(它使兩個正弦作一個完全旋轉)。通過改變輻射和正切靈敏度之間的比例,可以很容易地糾正這一錯誤。在MagAlpha,這個比率受參數“BCT”的控制。關于BCT調整的更多細節可以在任何MagAlpha數據表中找到。
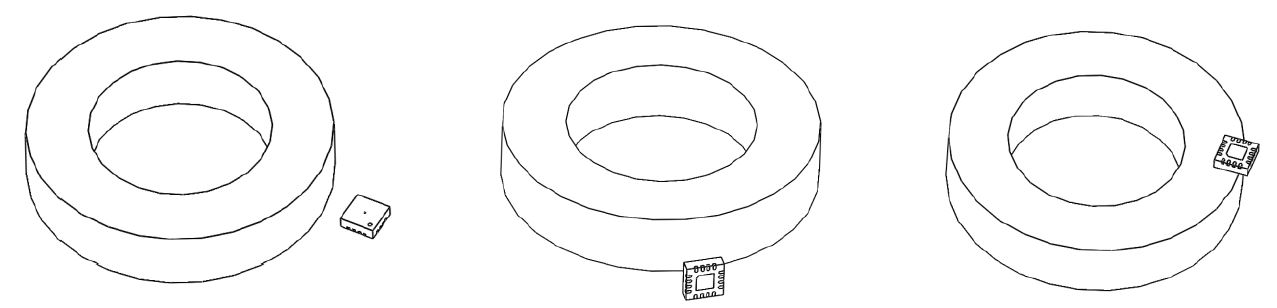
以側括號表示,我們指傳感器遠離旋轉軸旋轉的任何配置。三種側括號配置顯示于圖3 圖3.
1.2 實際情況
在實際系統中,有些不完善之處產生非線性,不能通過任何BCT調整加以補償:
定位不完善:由于系統機械容度造成的非理想磁鐵和傳感器位置
磁性不完善:磁性磁性的非理想磁化
如果所產生的誤差曲線的順序不同于第二調和, BCT 設置顯然不能補償錯誤。即使錯誤是第二調,如果階段不同于由 K 比率與 1 的差錯曲線,則錯誤不能通過 BCT 設置來補償。即使錯誤可以通過 BCT 調整來補償,但這一錯誤通常與磁鐵不完全相同,因此需要在生產時進行個別校準。
2.1 傳感器圍繞軸軸旋轉
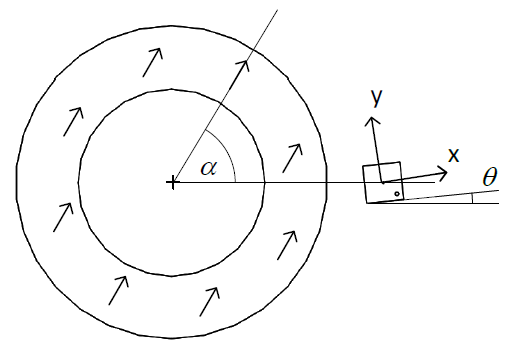
Figure 4 Imperfect sensor orientation: $theta$ is the rotation angle around the sensor normal axis
假設傳感器完全對齊,而 BCT 參數完全設定來補償磁場比例 k。 如果傳感器沿著其正常方向旋轉,輸出成為非線性 :
當 $ alpha$ 是軸角時, 這意味著錯誤較大, K 比例更大。 請注意, 如果弧和正切成分都等于( k = 1) , 輸出只被角值 $theta$ 抵消, 并且保持完全線性 。
與字段橢圓錯誤一樣,傳感器旋轉產生的錯誤主要有第二個調和元件。然而,與橢圓錯誤相比,這個錯誤被移動了45度。這意味著這個錯誤不能通過 BCT 裁剪來補償。因為BCT 參數在敏感度與 x 字段之比與 y 字段之比上運行,如果傳感器旋轉,傳感器的x 和 y 組件與磁輻射和相近部件不匹配。
注意:以上公式對任何配置都有效:側環、正環或頂環。
2.2 磁網偏心度
磁網偏心率產生第一個振幅的調差誤差(以 deg) $ frac {2e} r frac {180} pi$, 其中美元是偏心率(圖5)。這個表達式在 2D 中是準確的。對于一個有限的磁性高度,還有一個小的第三個調音元件。
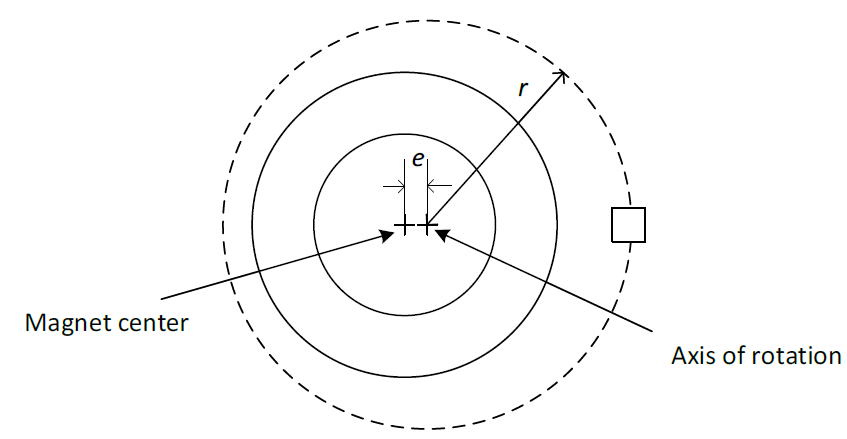
$frac {2e} rfrac {180} pi$ 振幅對于邊環有效。 它可以用來粗略地了解正弦或頂環配置中的錯誤, 但在頂環中, 效果更大, 因為偏心在一次革命期間, 以美元計的比率會有很大的變異 。
2.3 輻射或軸遷離
假設 BCT 為特定傳感器位置設置的完美。 如果位移將美元比修改為 $ Delta k$, 則導致的錯誤是第二曲調曲線 :
對于大梯度(K美元)沿線的流離失所情況,這一錯誤尤其嚴重。圖6 圖6
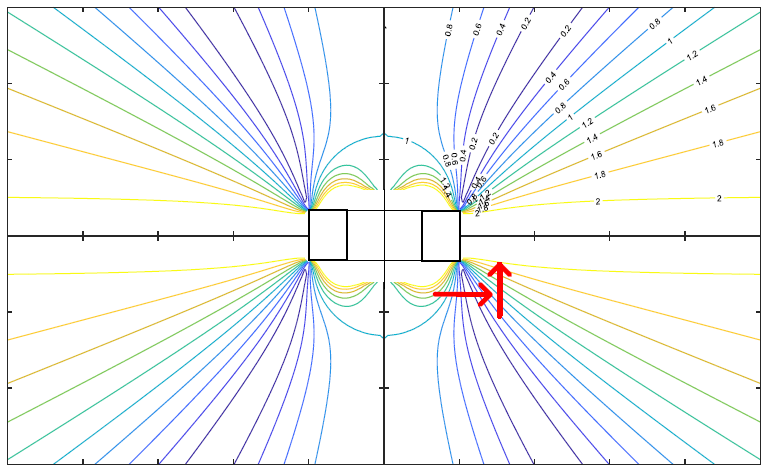
圖6 圖6 Lines of equal $k$ values for a typical magnet ring. large $k$ gradients are shown by red arrows
因此,關鍵的感官遷移是:
用于頂環的輻射遷移
以軸為正折疊流
側環配置受影響程度較小。圖7
這些不完善現象發生在制造過程中,特別是在磁化步驟期間。
3.1 由于去磁化場造成的非統一性
這種扭曲一般適用于所有磁環。 較窄的墻壁( 即接近輸出直徑的內直徑) 更嚴重。 從質量上來說, 磁化矢量不是平行的,而是隨環的彎曲而變化。 見 。圖8
要在最后狀態中被磁磁化,環將浸入一個沿直徑方向的堅固的球體中。對于這一步驟來說,重要的是當地材料粒子所感受到的總磁場。通常稱為H的球場是應用場(圓柱的距離)和“磁化場”的總和,即圓柱本身的相鄰粒子所生產的場。結果發現,對于一個封閉的高氣瓶來說,H是統一的。因此,所有磁場都朝著同一方向發展。統一的圓柱形在外圓軌道上產生完全正弦的正弦線、正流和軸形田。對于環形(圓柱形圓柱)來說,這種行為并不正確:H球會像在外圓軌道上一樣變化。圖9 圖9。這不是磁鐵的默認值,而是磁鐵形狀的結果。
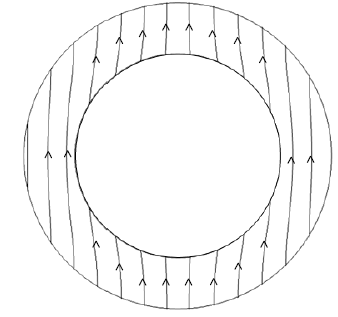
圖9 圖9 Total field H inside a ring, resulting from the application of a uniform field $H_{ext}$
一般而言,這種效果一般使半線(或軸)場的三角(或軸)場更加三角,而相偏近場的“方形”則更“方形”。圖10
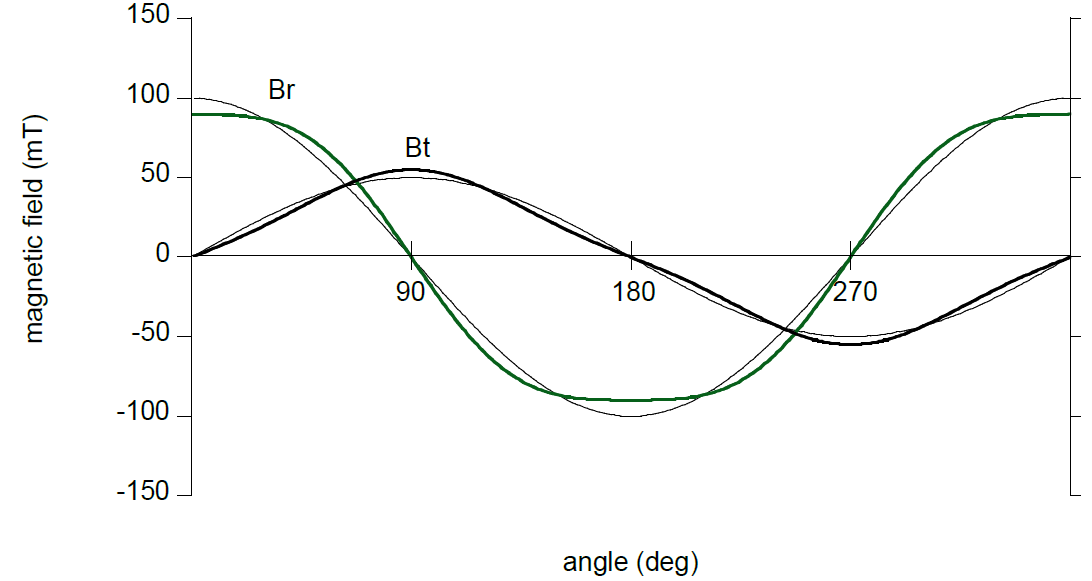
Figure 10 Third harmonic distortion of the radial and tangential field components
它采取第三次口音扭曲的形式:
美元是扭曲比率(我們假定兩者的扭曲比率相同)。 如果美元小,則造成錯誤:
它基本上意味著一個錯誤,其二調幅為$D2 -$ 和$4th} 調幅為$frac {D%2} 2$。原則上,第二個調幅誤差與橢圓誤差具有相同的階段,因此可以通過 BCT 裁剪來補償。
3.2 由于應用領域不完善造成不統一
差異錯誤可能源于磁化裝置內塊的不完善定位( 或按鍵時的厭異磁體 ) 。 由于它的有限大小, H 字段線并不完全平行。 如果部件偏向外, 野外線的曲度是不對稱的, 導致第一個調和錯誤 。 這影響到在任何側形形狀配置中的傳感器讀取 。
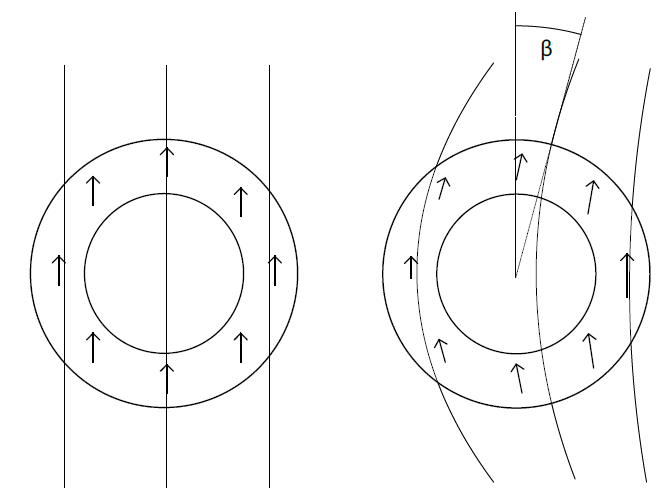
衡量這種不對稱的一種方法就是記錄半轉半轉與另一轉半轉之間的半轉或偏轉領域,并尋找不對稱之處。圖12由此產生的傳感器錯誤是振幅 $ beeta$ 的第一個調音錯誤。
3.3 磁力傾斜
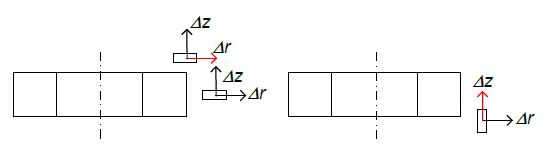
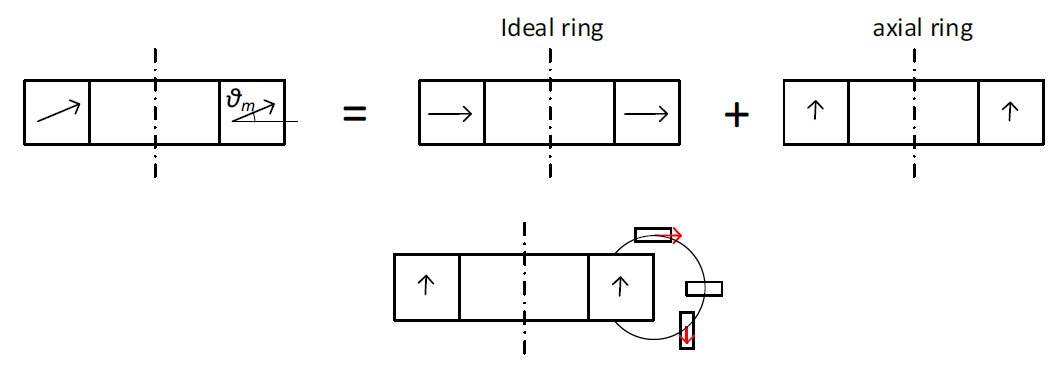
商業磁環或圓柱的磁化通常不嚴格地說是平面的(即旋轉軸的垂直),相反,磁化矢量在軸向上可傾斜幾度(每平米5度是常見的容度)。圖13
磁化可被視為理想磁場與純軸心擾動場的疊加,見圖14。在側環配置中,“軸磁”產生的磁場與死亡平面是垂直的,即沒有測量。(圖14)因此,磁化傾斜不影響側環傳感器的讀取。對正弦或頂環配置則不如此。
我們可以大致估計傾斜對正方形配置的影響。 軸環在傳感器位置上創造了一個恒定場, 不論軸角如何。 最壞的錯誤發生在理想磁鐵場在傳感器位置上純粹相近時: 在這種情況下, 寄生蟲場與理想場是垂直的 :
在傳感器接近磁力中高度且磁力高度小于磁力高度的限度內,這一誤差可以由以下方式大致推算:
磁力傾斜就是一百萬美元的美元。
從圖14可以看出,從質量上看,一個大得多的錯誤將影響上環配置。
審核編輯:彭菁
-
機械
+關注
關注
8文章
1538瀏覽量
40472 -
線性
+關注
關注
0文章
196瀏覽量
25128 -
磁鐵
+關注
關注
0文章
94瀏覽量
13463 -
角度傳感器
+關注
關注
7文章
133瀏覽量
36160
發布評論請先 登錄
相關推薦

Magalpha 角度傳感器在機器人技術中的應用






 工商網監
工商網監
評論