 用于精確讀數的Arduino轉速計電路
用于精確讀數的Arduino轉速計電路
轉速計是一種測量旋轉物體的 RPM 或角速度的裝置。它與車速表和里程表不同,因為這些設備處理身體的線性或切向速度,而轉速表又名“tach”處理更基本的RPM。
轉速計由一個計數器和一個計時器組成,兩者協同工作為我們的項目提供了 RPM.In,我們將使用我們的 Arduino和一些傳感器,我們將設置計數器和計時器,并開發我們方便易用的轉速表。
先決條件
計數器只不過是一種設備或設置,可以計算任何某些常規發生的事件,例如在旋轉時在光盤中傳遞一個點。最初,計數器是使用機械布置和連桿(如齒輪,棘輪,彈簧等)建造的。
但是現在我們使用的計數器具有更復雜和高精度的傳感器和電子設備。定時器是一種電子元件,能夠測量事件之間的時間間隔或測量時間。
在我們的Arduino Uno中,有一些計時器不僅可以跟蹤時間,還可以保持Arduino的一些重要功能。在 Uno 中,我們有 3 個計時器,分別名為Timer0、Timer1 和 Timer2。這些計時器具有以下函數-? Timer0- 用于 Uno 函數,如delay()、millis()、micros() 或 delaymicros()。
? 定時器1- 用于伺服庫的工作。
? Timer2- 用于 tone()、notone() 等函數。
除了這些功能外,這 3 個定時器還負責在 PMW 指定引腳中使用 analogWrite() 命令時生成 PWM 輸出。
中斷的概念
在Arduino
Uno中,存在一個隱藏的工具,它可以為我們訪問許多稱為計時器中斷的功能。中斷是一組事件或指令,在調用中斷設備的當前功能時執行,即無論您的Uno之前執行什么代碼,但是一旦中斷稱為Arduino,就會執行中斷中提到的指令。
現在,可以在用戶使用內置的Arduino語法定義的特定條件下調用中斷。我們將在我們的項目中使用此中斷,這使我們的轉速表比網絡上的其他轉速表項目更堅決,更精確。
電路設置
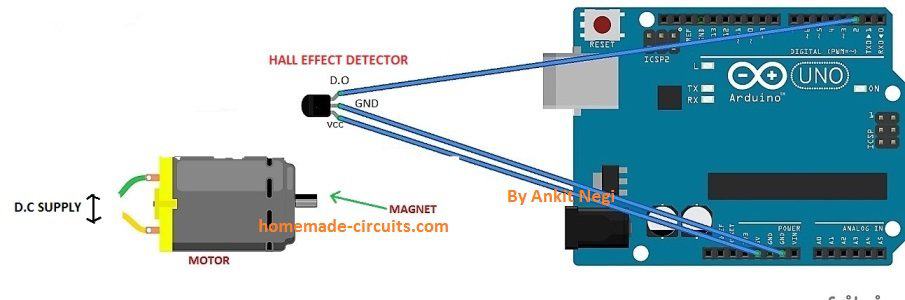
? 創建設置如下-
? 在要測量轉速的軸上裝有使用膠槍或電工膠帶的小磁鐵。
? 霍爾效應傳感器前面有一個探測器,3個用于連接的引腳。
? Vcc 和 Gnd 引腳分別連接到 Arduino 的 5V 和 Gnd 引腳。傳感器的輸出引腳連接到Uno的數字引腳2以提供輸入信號。
? 所有組件都固定在安裝板上,霍爾檢測器從板上指出。
int sensor = 2; // Hall sensor at pin 2
volatile byte counts;
unsigned int rpm; //unsigned gives only positive values
unsigned long previoustime;
void count_function()
{ /*The ISR function
Called on Interrupt
Update counts*/
counts++;
}
void setup() {
Serial.begin(9600);
//Intiates Serial communications
attachInterrupt(0, count_function, RISING); //Interrupts are called on Rise
of Input
pinMode(sensor, INPUT); //Sets sensor as input
counts= 0;
rpm = 0;
previoustime = 0; //Initialise the values
}
void loop()
{
delay(1000);//Update RPM every second
detachInterrupt(0); //Interrupts are disabled
rpm = 60*1000/(millis() - previoustime)*counts;
previoustime = millis(); //Resets the clock
counts= 0; //Resets the counter
Serial.print(“RPM=”);
Serial.println(rpm); //Calculated values are displayed
attachInterrupt(0, count_function, RISING); //Counter restarted
}
了解代碼
我們的轉速表使用霍爾效應傳感器;霍爾效應傳感器基于霍爾效應,以其發現者埃德溫·霍爾命名。
霍爾效應是當垂直于電流引入磁場時,在載流導體上產生電壓的現象。由于這種現象而產生的電壓有助于輸入信號的產生。如前所述,中斷將在本項目中使用,要調用中斷,我們必須設置一些條件。Arduino
Uno 有 2 個調用中斷的條件-
上升- 使用時,每次輸入信號從低電平變為高電平時都會調用中斷。
FALING-當使用它時,當信號從高電平變為低電平時,將調用中斷。
我們使用了 RISING,發生的情況是,當放置在軸或旋轉物體中的磁鐵靠近霍爾檢測器時,產生輸入信號并調用中斷,中斷啟動中斷服務例程 (ISR)
功能,其中包括計數值的增量,從而發生計數。
我們使用了 Arduino 的 millis() 函數和 previoustime(變量)來設置計時器。
因此,RPM 最終使用數學關系計算 -
RPM= 計數/所用時間 將毫秒轉換為分鐘并重新排列,我們得到公式= 60*1000/(millis() - 上一個時間)*計數。
延遲(1000)決定了RPM值將在屏幕上更新的時間間隔,您可以根據需要調整此延遲。
獲得的RPM值可以進一步用于使用關系-v=(3.14DN)/60 m/s計算旋轉物體的切向速度。
RPM 的值也可用于計算旋轉輪或圓盤行進的距離。
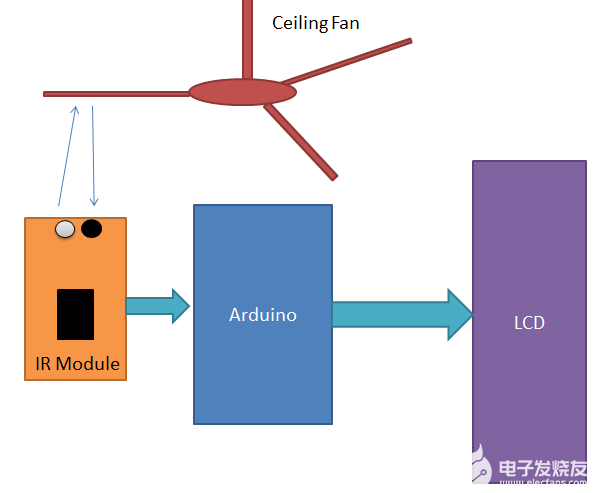
通過連接LCD顯示器(16 * 2)和電池,可以更好地使用該設備,而不是將值打印到串行監視器。
-
電路圖
+關注
關注
10325文章
10718瀏覽量
528382 -
Arduino
+關注
關注
187文章
6464瀏覽量
186682 -
轉速計
+關注
關注
0文章
8瀏覽量
6849
發布評論請先 登錄
相關推薦

用IR傳感器和Arduino制作一個數字轉速計(附代碼)
回收Fluke931手持式轉速計 福祿克931
Fluke931轉速計的使用手冊免費下載







 工商網監
工商網監
評論