 自動駕駛舉步維艱的求真之路
自動駕駛舉步維艱的求真之路
每一個行業的變革,都將從瘋狂逐漸走向理智,自動駕駛行業也是如此。自汽車產業出現以來,對于自動駕駛的追求便從未停歇。汽車自動化實驗最早甚至可以追溯到1920年,讓科技服務于人的道路上,汽車工程師們從未止步,一代又一代汽車工程師的努力,都只為了一個目的,那就是“解放人類雙手”。而到了百年之后的2023年,自動駕駛似乎離我們依舊還有很遠,自動駕駛的破局之路依舊遙遙無期。
在追尋真理的路上,必將困難重重,而追求真理的過程,也會有很多挑戰,自動駕駛的發展,也并非一條路走到底的探索模式,更是經過了擇路、驗證、再放棄、再擇路等不斷重復的過程,自動駕駛汽車的發展也并非只要考慮技術的可行性,作為服務大眾出行的一項關鍵技術,如何讓大眾消費者可接受更是非常重要的,自動駕駛的求真之路舉步維艱。
激光雷達,技術的非必要選擇
自動駕駛的實現離不開感知、決策、執行這3個非常重要的核心技術,從感知層面來說,更為完善的交通信息將讓自動駕駛汽車可以更加安全地完成行駛任務。作為讓自動駕駛汽車可以清晰看到路況的重要技術,現階段的自動駕駛感知主要是通過在汽車上加裝感知硬件,激光雷達由于其感知精度高、探測信息全、抗干擾能力強等優勢,在自動駕駛感知硬件的選用上一直處于優勢地位,以Waymo為代表的自動駕駛企業更是將激光雷達作為主要的感知硬件。
國內的諸多造車新勢力也對激光雷達喜愛有加,不同車企在激光雷達安裝位置、數量、掃描方案的選擇上,也都存在差異。其中,以蔚來ET7、理想 L9、智己 L7 為代表的車企在車頂安裝激光雷達,以極弧S、小鵬 G9 為代表的車企在保險杠安裝激光雷達,以及集度則為首家在前機蓋安裝激光雷達的品牌。在安裝數量方面,廠商搭載的激光雷達數量從1 到 4 顆不等,普遍搭載 2 顆以上激光雷達。
激光雷達是促使自動駕駛從0到1的關鍵部件,也是諸多車企展現自身自動駕駛實力的重要宣傳配件。激光雷達的裝載似乎已經與自動駕駛畫上了等號,凡是自動駕駛的技術上就離不開激光雷達,而在搭載有激光雷達的汽車上,其宣傳重點一定是L2,甚至L3級自動駕駛。
有龍的世界一定會有屠龍者,自動駕駛行業也是一樣,在大家都默認激光雷達是自動駕駛實現必不可少的配件時,特斯拉的出現讓自動駕駛出現了新的可能。由于激光雷達的成本過高,因此眾多裝載激光雷達的汽車的購買費用,讓很多人望而卻步,這也是導致以激光雷達為主要感知硬件的技術方案未能大概率普及到中、低端車型上的原因。
車載攝像頭作為主要感知硬件的自動駕駛模式劈開了自動駕駛行業激光雷達不可或缺這一觀念的口子,通過采用在車輛上加裝車載攝像頭作為主要感知硬件的純視覺感知方案,特斯拉所走的自動駕駛道路,讓自動駕駛汽車更像“人”。通過車載攝像頭采集交通環境的圖像數據,經過復雜的感知神經網絡架構進行處理,構建真實世界的三維向量空間,讓自動駕駛汽車可以理解和認識到交通環境。
特斯拉的出現讓自動駕駛擺脫激光雷達成為了現實,也讓激光雷達成為自動駕駛技術實現的非必要選擇,也在自動駕駛感知硬件的選擇上撕開了一道口子,提出了另一種可能。
高精度地圖,離開舞臺的中央
高精度地圖,作為彌補感知硬件不足,讓自動駕駛汽車可以更加安全行駛的重要技術,在自動駕駛出現后,就一直承擔著非常重要的角色,在近幾年自動駕駛發展中,高精度地圖似乎是必需品。作為“上帝之眼”,高精度地圖讓自動駕駛汽車可以感知到其他感知硬件無法探測到的距離,讓自動駕駛汽車可以提前了解前方路況,提前準備。
相較于普通的導航地圖,高精度地圖具有高精度、多數據、準定位等優勢,像是道路的彎度、坡度、車道線位置、類型、寬度、交通信號燈、交通標識、路邊地標等元素,均可以在高精度地圖中呈現。高精度地圖,就像是自動駕駛汽車的一根拐杖,讓自動駕駛汽車可以更加平穩地走路。
進入了2023年,自動駕駛行業也迎來了新一輪的發展,高精度地圖對自動駕駛汽車的不可替代性不言而喻,但其發展更是困難重重。2023年的自動駕駛行業,“重感知,輕地圖”的概念逐漸成為主流,小鵬、華為、蔚來、理想、地平線、毫末智行等等國內駕駛輔助的“第一梯隊”相繼宣布,未來將會采用以車輛自身傳感器為主,高精地圖為輔的策略繼續發展自動駕駛(高級輔助駕駛)技術。
之所以眾多車企有如此統一的看法,主要是因為高精度地圖構建的難度大、成本高,根據《智能網聯汽車高精地圖白皮書》的說法,采用傳統測繪車方式,分米級地圖的測繪效率約為每天每車500公里路,成本為每公里10 元左右。此外,在道路出現人為性擁堵、道路標識更換的時候,高精度地圖如何及時響應也是一個難題,為了讓自動駕駛汽車在任何情況下都可以安全駕駛,這就需要高精度地圖能及時更新,這一系列的要求讓自動駕駛落地成本進一步提升。
特斯拉FSD和Mobileye的REM都采用了眾包地圖的概念,即每一輛搭載該系統的車輛都是測繪車。將行駛過程中采集的數據上傳到云端,形成新的動態圖層,搭載該系統的車輛越多,地圖越精確,更新越及時。這種方案雖然可以解決高精度地圖無法及時更新的問題,但卻帶出了更多的問題,由于高精度地圖所含的交通信息非常豐富,如果使用不當,將導致重要的信息泄漏,為此國內對于高精度地圖的采集,在法律上提出了更為嚴苛的要求,這也導致高精度地圖的采集難度進一步提升。
如果只有使用高精度地圖才能讓自動駕駛落地,對于部分不允許采集高精度地圖的地方,自動駕駛將無法實現,這也讓自動駕駛技術無法真正普及。高精度地圖,是自動駕駛的拐杖,也是自動駕駛的牢籠,只有“輕地圖、重感知”,才能讓自動駕駛真正落地,這也是諸多車企提出這一方案的主要原因。
依靠高精度地圖的自動駕駛發展路徑已經走進了一個死胡同,如果繼續走下去,很難看到出口,或許只有找到其他方向,才是破局之路。
智能網聯,從一而終的選擇
智能網聯還是單車智能,或許自自動駕駛出現以來,就是一個熱點話題。2023年7月由工業和信息化部、國家標準化管理委員會印發的《國家車聯網產業標準體系建設指南(智能網聯汽車)(2023版)》提到,到2025年,系統形成能夠支撐組合駕駛輔助和自動駕駛通用功能的智能網聯汽車標準體系。到2030年,全面形成能夠支撐實現單車智能和網聯賦能協同發展的智能網聯汽車標準體系,至此智能網聯的發展有了進一步的明確方向。
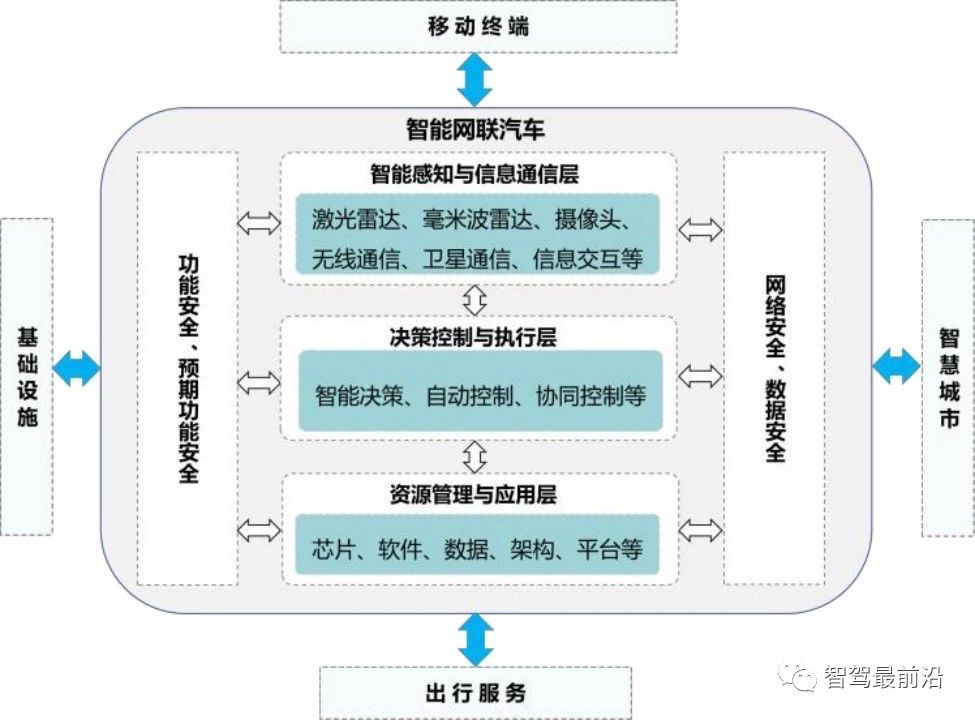
智能網聯汽車即具備環境感知、智能決策和自動控制,或與外界信息交互,乃至協同控制功能的汽車。智能網聯汽車標準體系橫向以智能感知與信息通信層、決策控制與執行層、資源管理與應用層三個層次為基礎,縱向以功能安全和預期功能安全、網絡安全和數據安全通用規范技術為支撐,形成“三橫兩縱”的核心技術架構,完整呈現標準體系的技術邏輯,明確各項標準在智能網聯汽車產業技術體系中的地位和作用。同時結合智能網聯汽車與移動終端、基礎設施、智慧城市、出行服務等相關要素的技術關聯性,體現跨行業協同特點,共同構建以智能網聯汽車為核心的協同發展有機整體,更好地發揮智能網聯汽車標準體系的頂層設計和指導作用。
智能網聯汽車與單車智能從來都不是一個選擇題,而是一個循序漸進的關系,在汽車“新四化”出現以后,電動化、智能化、網聯化、共享化發展路徑已非常明確,單車智能發展到一定階段后,高級輔助駕駛將實現普及,L3級自動駕駛將實現,但L5級自動駕駛的落地,則需要智能網聯技術的加持。
當參與交通的所有車輛信息互聯后,整個交通將成為一個整體,所有的車輛的行駛路徑和方案將由一個大腦統一進行控制,擁堵、碰撞將不再出現,自動駕駛將成為現實。智能網聯在自動駕駛出現后或許被否定過,但最終成了從一而終的選擇,雖然智能網聯的實現需要政府部門的大力支持,其實現過程依舊有很長一段路要走,但這條路或許是自動駕駛的必經之路。
審核編輯 黃宇
-
激光雷達
+關注
關注
967文章
3939瀏覽量
189599 -
自動駕駛
+關注
關注
783文章
13684瀏覽量
166147 -
ZDP
+關注
關注
0文章
2瀏覽量
5609
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論