 【分享】什么是CAN總線?
【分享】什么是CAN總線?
在之前的文章中,小編介紹了幾種常見的短距離無線通信傳輸技術和低功耗廣域網絡(LPWAN),后面的幾期文章將分享常見的有線傳輸方式,如CAN總線、串口通信、USB通信等。
有線傳輸方式
第一期:CAN總線
什么是CAN?
CAN是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在汽車車載產業中,出于對車載安全性、舒適性、方便性、低功耗、低成本等等的要求,各種各樣的電子控制系統被開發了出來。由于這些電子控制系統之間通信所用到的數據類型、對可靠性的要求都不盡相同,而且由多條總線構成的情況也非常多,線束的數量也隨著構成情況而增加。
為適應“適當減少線束的數量”、“通過多個LAN,進行對大量數據間的高速數據通信”的需求,1986年德國電氣商博世公司開發出了面向汽車行業的CAN通信協議。此協議推出之后,CAN通過ISO11898及ISO11519進行了標準化,成為了歐洲已在汽車行業網絡控制系統內的標準協議。
CAN總線的數據格式
CAN-bus通信幀共分為數據幀、遠程幀、錯誤幀、過載幀和幀間隔。
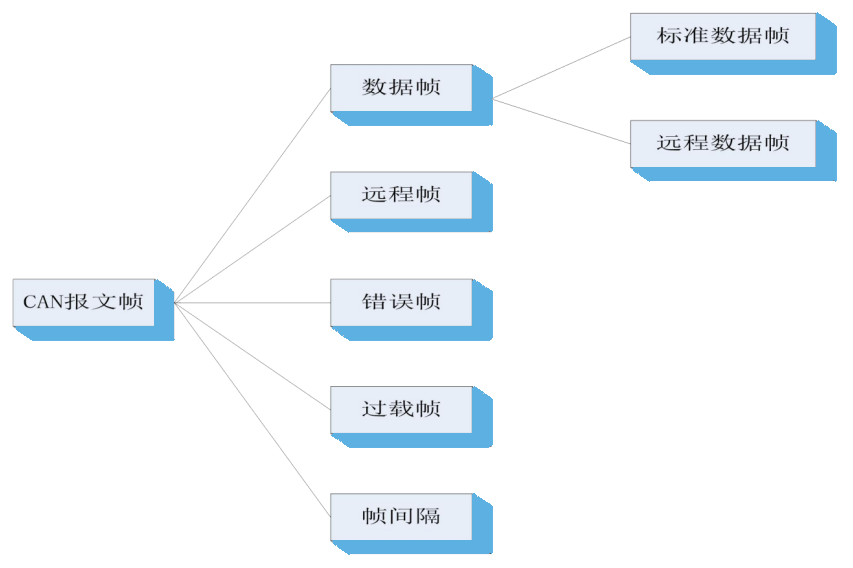
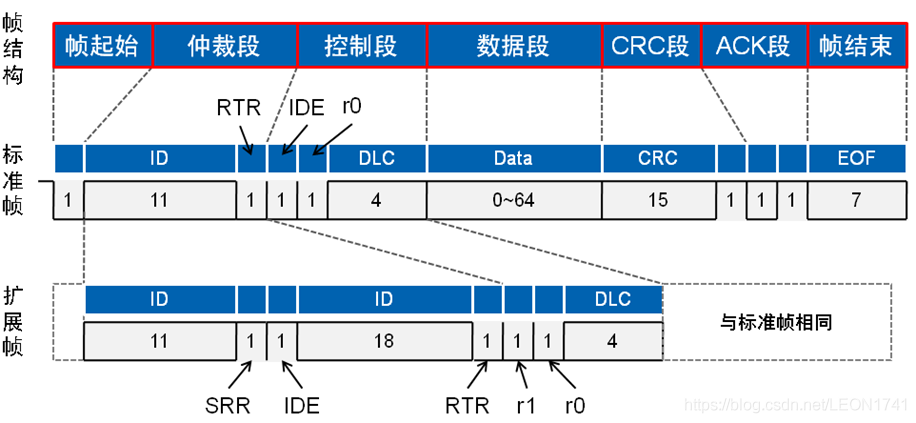
數據幀:結構上由7個段組成,其中根據仲裁段ID碼長度的不同,分為標準幀(CAN2.0A)和擴展幀(CAN2.0B)。標準幀為11位,擴展幀為29位。這也是我們在使用中接觸最多的格式。
遠程幀:與數據幀相比沒有數據段,結構上由7個段組成。當你需要總線上的一個節點向你發送數據,使用次節點的ID,發送一幀遠程幀。遠程幀最大的好處就是只需要一幀的時間就能完成一次雙向交互。
錯誤幀:雖然CAN總線是可靠性很高的總線,但是依然會出錯:CAN總線上會出現5種錯誤。
過載幀:當某個節點沒有做好接收下幀數據將發送過載幀通知節點。
幀間隔:只存在于數據幀與遠程幀之間,用于幀之間的分離。
CAN總線的通信特點
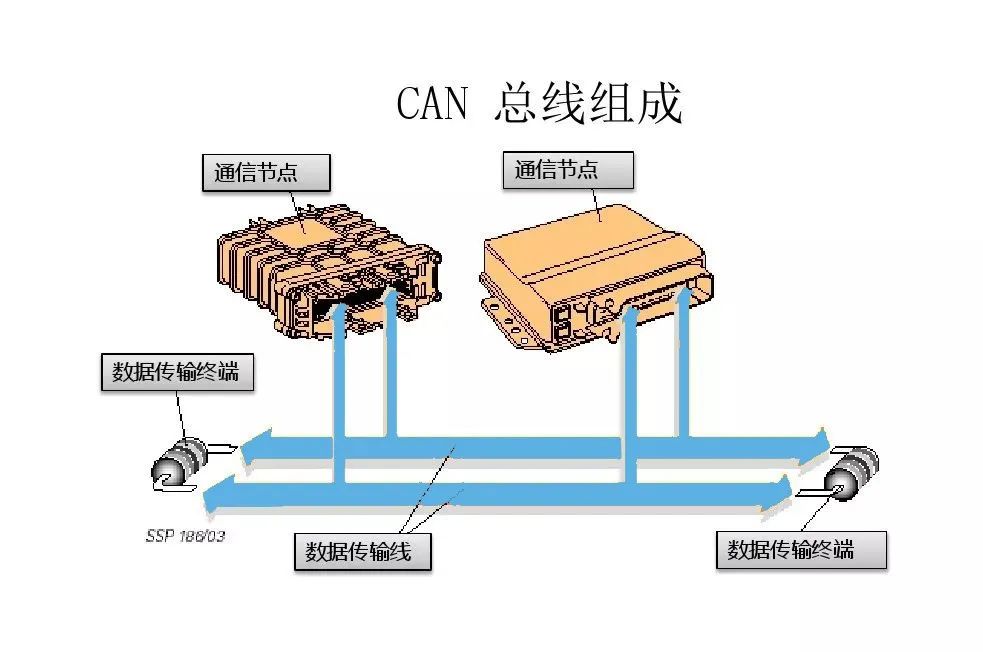
CAN總線是德國BOSCH從80年代初為了解決現代汽車中眾多控制、測試系統之間的數據交換,從而開發出來的一種串行數據通信協議,它是可以用雙絞線、同軸電纜或光導纖維來作為通信介質的一種多主總線。通信速率最高可達1Mbps。
(1)可在各節點之間實現自由通信:CAN協議的一個最大特點是廢除了傳統的站地址編碼,取而代之的是對通信數據塊進行編碼。采用這種方法的優點是,在理論上,CAN構成的網絡節點個數是不受限制的。數據塊的標識符可由11位或29位二進制數組成,因此可以定義2或2個以上不同的數據塊,這種按數據塊編碼的方式,還可使不同的節點同時接收到相同的數據,這一點在分布式控制系統中非常有用。
(2)結構簡單:只有2根線與外部相連,并且內部集成了錯誤探測和管理模塊。
(3)數據糾錯:采用雙線串行通信方式,檢錯能力強,可在高噪聲干擾環境中工作,每幀數據都有CRC校驗及其他檢錯措施,保證了數據傳輸的高可靠性,適于在高干擾環境下使用。
(4)完成對通信數據的成幀處理:CAN總線通信接口中集成了CAN協議的物理層和數據鏈路層功能,可以完成對通信數據的成幀處理,包括數據位填充、數據塊編碼、循環冗余檢驗、優先級判別等等。
CAN 的高性能和可靠性的特點現已被了解認同,并且被廣泛地應用在工業自動化、船舶、醫療設備、工業設備自動化等行業。CAN總線儼然是當今自動化領域技術發展的大熱之一,被譽為自動化領域的計算機局域網。它的出現為分布式控制系統實現各節點之間的實時、可靠的數據通信提供了強大有力的技術支持。
-
CAN
+關注
關注
57文章
2715瀏覽量
463365 -
通信
+關注
關注
18文章
5969瀏覽量
135850 -
總線
+關注
關注
10文章
2866瀏覽量
87981
發布評論請先 登錄
相關推薦
CAN總線通信原理介紹 CAN總線模塊選擇指南
使用CAN總線的注意事項 CAN總線與其他通信協議對比

如何使用Arduino實現CAN總線通信




CAN總線控制器是什么意思
can總線中斷狀態什么意思呢?







 工商網監
工商網監
評論