 pi調節器p和i都是什么 pi調節器參數怎么整定
pi調節器p和i都是什么 pi調節器參數怎么整定
pi調節器p和i都是什么
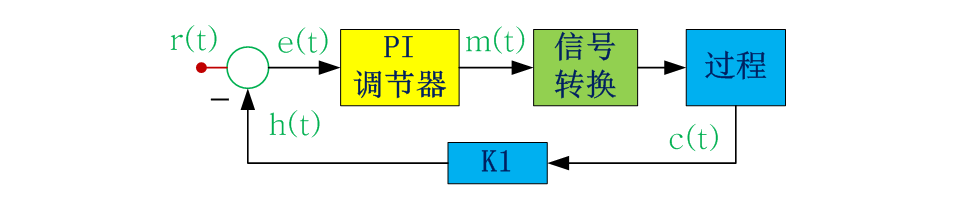
PI調節器是一種常見的控制系統反饋控制器,用于調節系統。在PI調節器中,P代表比例控制作用,I代表積分控制作用。
比例控制作用(P):比例控制作用是根據反饋信號的偏差與設定點之間的差異來調節控制量。比例控制器產生的輸出與偏差成比例,通常是乘以一個定比例常數。P控制作用能夠更快地響應系統的變化,但可能會導致系統產生穩態誤差。
積分控制作用(I):積分控制作用通過積分偏差來調節控制量。積分控制器對于系統的溫和變化和持續性誤差有很好的響應,可以消除穩態誤差,但可能會導致系統的過補償和振蕩。
PI調節器結合了比例控制和積分控制的優點,能夠更好地調節系統,提供更好的性能。具體的調節參數(比例增益、積分時間常數)需要根據具體的應用和系統特性進行選擇和調整。
pi調節器參數怎么整定
PI調節器的參數整定是為了獲得系統的穩定性和良好的控制性能。以下是一種常用的PI調節器參數整定方法,稱為經驗調整法:
比例增益(Kp)的初步設定:
將積分時間常數(Ti)設為一個較大的值,比如Ti=100。
用經驗法取得一個較好的比例增益初始值Kp0,例如根據已知的系統動態響應曲線或者試控制的方式。
初始比例增益可以根據系統的特性來選擇,通常比例增益越高,系統的快速響應能力就越強。
積分時間常數(Ti)的設定:
根據系統的特性和性能需求,選擇一個適當的積分時間常數。
如果系統的穩態誤差較大,可以適當增加積分時間常數,以提高系統的魯棒性和穩定性。
同時,積分時間常數的增加也會增加系統的超調和響應時間。
參數優化和調整:
在初步設定的基礎上,進行參數的優化和調整。
通過試控制或模擬仿真,在不同工況下觀察系統的響應特性,例如超調量、響應時間、穩態誤差等。
根據實際觀察結果,逐步微調比例增益和積分時間常數,以達到期望的控制性能。
需要注意的是,PI調節器的參數整定是一個迭代的過程,需要根據實際系統的動態響應特性和控制要求進行不斷的試驗和調整。此外,還有其他更為精確和復雜的參數整定方法,例如Ziegler-Nichols方法和頻域分析法,可根據具體情況選擇不同的方法進行參數整定。
編輯:黃飛
-
PI
+關注
關注
12文章
210瀏覽量
112138 -
調節器
+關注
關注
5文章
831瀏覽量
46364 -
反饋控制器
+關注
關注
0文章
6瀏覽量
5520 -
PI調節器
+關注
關注
1文章
21瀏覽量
8325
發布評論請先 登錄
相關推薦
PI電流調節器的工作原理和種類
pi調節器原理_pi調節器電路圖_pi調節器參數作用
pi調節器的輸入和輸出_pi調節器的傳遞函數
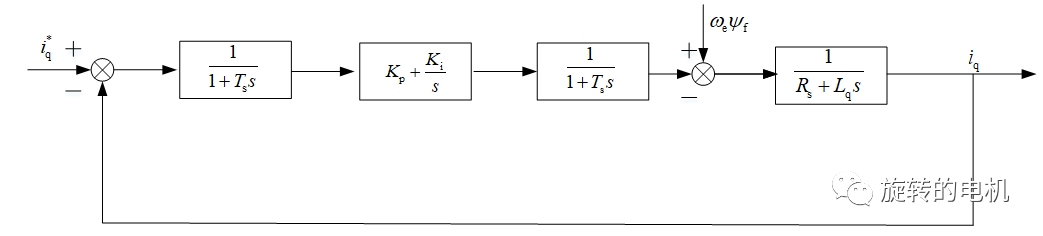
永磁同步電機(PMSM)磁場定向控制(FOC)電流環PI調節器參數整定

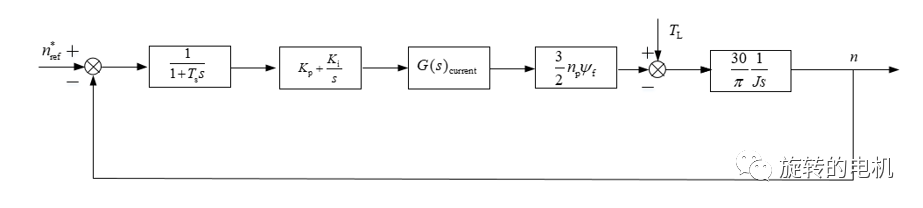
永磁同步電機磁場定向控制轉速環PI調節器參數整定
永磁同步電機磁場定向控制電流環PI調節器的參數整定
永磁同步電機磁場定向控制轉速環PI調節器的參數整定





 工商網監
工商網監
評論