") 解碼大眾全新數(shù)字高爾夫8汽車CAN FD行駛功能電氣架構(gòu)
解碼大眾全新數(shù)字高爾夫8汽車CAN FD行駛功能電氣架構(gòu)
據(jù)在大眾原廠的伙伴介紹,全新數(shù)字高爾夫8將在11月上市銷售,目前高爾夫8在行駛功能電氣架構(gòu)上采用的CAN FD,在多媒體這一塊采用的以太網(wǎng),后續(xù)估計大部分類似同樣MQBEvo平臺的車型均會復(fù)制升級過來,那么,未來在MQBEvo平臺的車型將代表著大眾智能化、數(shù)字化、電氣化的一種新標(biāo)準(zhǔn)。他們內(nèi)部結(jié)構(gòu)和框架也做了很大的改動,數(shù)據(jù)和總線,是我們關(guān)注的要點,雖然暫時不知道以后涉及的數(shù)據(jù)和控制到哪一步,至少,我們首先得獲取到大眾原廠的CAN FD數(shù)據(jù),再談數(shù)據(jù)應(yīng)用。
CAN FD我們研究得還不深入,僅在已經(jīng)裝配的部分車型上做了深入研究,比如奔馳、理想汽車、小鵬、特斯拉、路特斯、奧迪、路特斯等。那么,大眾高爾夫8是沿用奧迪的那一套嗎?說不清楚,因為還沒研究。但是CAN FD總線,并不是新物種,BOSCH在2011年就發(fā)布了這個新一代的通信技術(shù)。
在域控制器領(lǐng)域,已有不少車型涉及并采用CAN FD已經(jīng)實現(xiàn)了功能就有座椅調(diào)節(jié)、后視鏡控制、空調(diào)控制等功能,綜合統(tǒng)一管理各執(zhí)行器,合理有效地分配系統(tǒng)資源。車身域控制器的功能眾多,包括實現(xiàn)燈光控制、雨刮控制、門窗控制、后視鏡折疊控制、PEPS、座椅控制等,其中燈光控制部分就包括了近光燈、遠光燈、位置燈、轉(zhuǎn)向燈、剎車燈、日行燈。
車身雨刮部分包括了低速雨刮、高速雨刮、間隔控制和點刮,門窗控制部分包括了四門閉鎖、碰撞解鎖、自動落鎖、車窗升降及百分比、車窗防夾及一鍵升窗,后視鏡包括了折展、調(diào)節(jié)及加熱,PEPS包括了無鑰匙啟動、無鑰匙進入、迎賓功能、發(fā)動機防盜、整車電源控制與管理,座椅包括控制調(diào)節(jié)與通風(fēng)、加熱,其他還包括OTA及遠程診斷、升級、刷寫、駕駛模式設(shè)定等等。通過CAN FD報文數(shù)據(jù)長度可以看出:
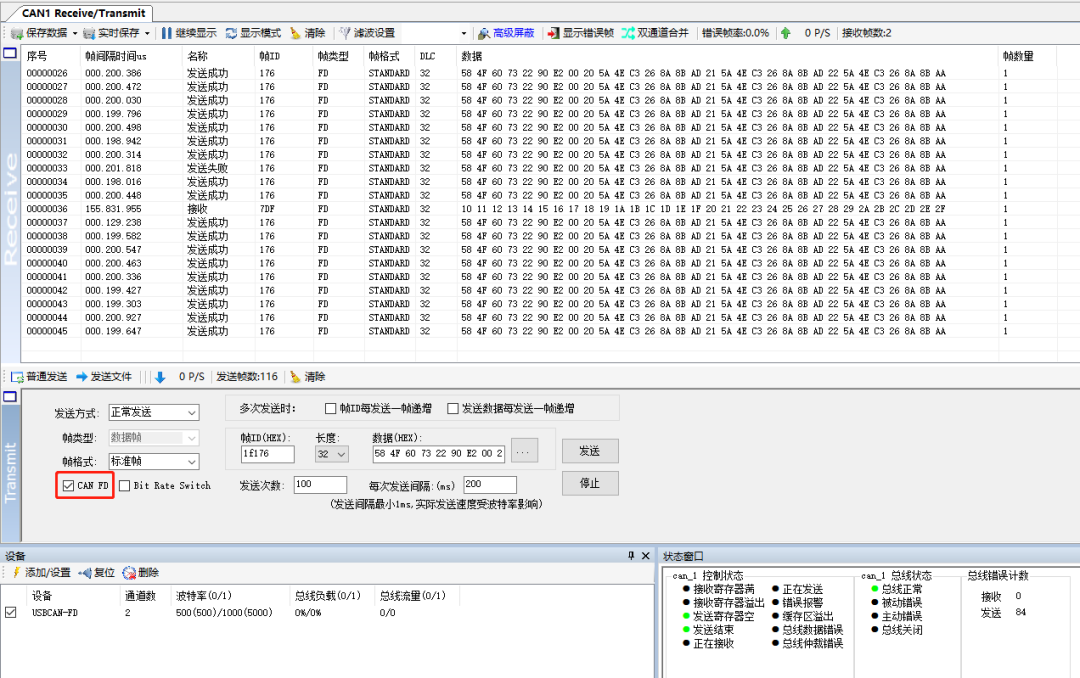
以太網(wǎng)相對來說成本要高出很多,那么在智能座艙這邊的域控,采用以太網(wǎng)作為信號和數(shù)據(jù)傳輸以及娛樂系統(tǒng)應(yīng)用,比較合適。但受制于大多傳感器和控制單元、零部件均還是用的CAN或者CAN FD,那么勢必在大眾高爾夫8上,要獲取到原廠協(xié)議數(shù)據(jù),就很必要去做好基于汽車行駛電氣MCU可擴展CAN/CAN FD的數(shù)據(jù)接口。
在設(shè)計CAN產(chǎn)品時,MCU的CAN控制器資源是我們工程師們關(guān)注的第一要素,特別是像一些包括了CAN控制的MCU、核心板、工控板升級中需要增加CAN/CAN FD接口。但是原有的標(biāo)準(zhǔn)CAN2.0硬件方案中,會資源不夠的情況,另一些就是需要使用到多路CAN接口,而大部分MCU支持的CAN總線接口又不多,導(dǎo)致CAN接口數(shù)量又滿足不了。這就需要將MCU多余的通信接口擴展為CAN接口,說來是有點小麻煩,但是技術(shù)上也能曲線救國。
速銳得最近嘗試用UART/SPI接口轉(zhuǎn)CAN隔離模塊,可以很方便的嵌入到具有UART/SPI接口的設(shè)備中,在不需要改變原硬件結(jié)構(gòu)的前提下獲得CAN_BUS通信接口。造成這個的主要原因是,早期的產(chǎn)品使用的是RS485或者RS232通信,現(xiàn)階段需要將產(chǎn)品升級到CAN/CAN FD通信,另外就是之前零部件受制于車企成本限制,部分主控MCU可能都用的不帶CAN的微處理器,其三就是汽車越來越發(fā)達,多路CAN的場景需求滿足不了了。例如一些充電樁的控制器,CAN的路數(shù)要大于2路,市面上支持2路以上CAN的微處理器極少,或者價格不菲。
當(dāng)然,也有一些其他的思路,比如串口轉(zhuǎn)CAN、以太網(wǎng)轉(zhuǎn)CAN、WIFI轉(zhuǎn)CAN、光纖轉(zhuǎn)CAN,成本不同而已。UART/SPI接口轉(zhuǎn)CAN主要有2種形式,一種是利用協(xié)議控制芯片實現(xiàn),另一種通過嵌入式轉(zhuǎn)換模塊實現(xiàn)。真碰到這個情況,我們會推薦客戶采用第二種。這個具備三方面的優(yōu)勢:
1、配置簡單方便,配合上位機或者串口指令,幾個簡單的串口數(shù)據(jù)就可以完成
2、數(shù)據(jù)緩存大,在高速或者數(shù)據(jù)吞吐量大時可以避免丟幀的現(xiàn)象
3、性能優(yōu)異,模塊自帶MCU完成協(xié)議轉(zhuǎn)換及緩存處理,減輕用戶MCU負(fù)擔(dān)
CANFDSM-100其實還是指的推薦的一款串口轉(zhuǎn)CAN的模塊,雖然不帶CAN或者CAN FD收發(fā)器,用自己增加隔離或者不隔離的收發(fā)器即可。
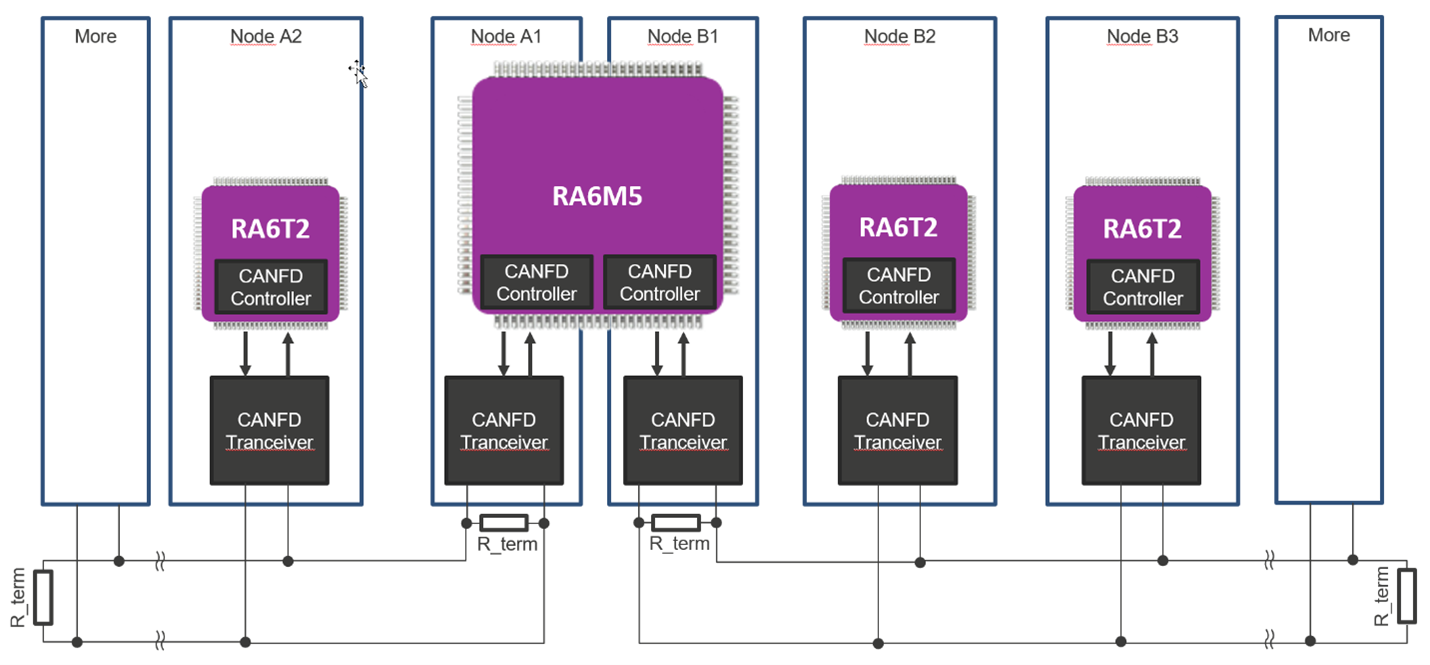
但是如果沒有以前的拖泥帶水的設(shè)計,那么就直接采用帶CAN FD功能的MCU直接自己增加CAN收發(fā)器,設(shè)計大眾高爾夫8的CANFD產(chǎn)品即可。利用協(xié)議控制芯片實現(xiàn),就等同于重新開發(fā),硬件架構(gòu)將改為如下圖示,也不需要做其他的轉(zhuǎn)換,目前采用的CAN收發(fā)器已經(jīng)足夠滿足5M的數(shù)據(jù)交互,因此,CAN收發(fā)器也不用變更。
如電路設(shè)計所示:
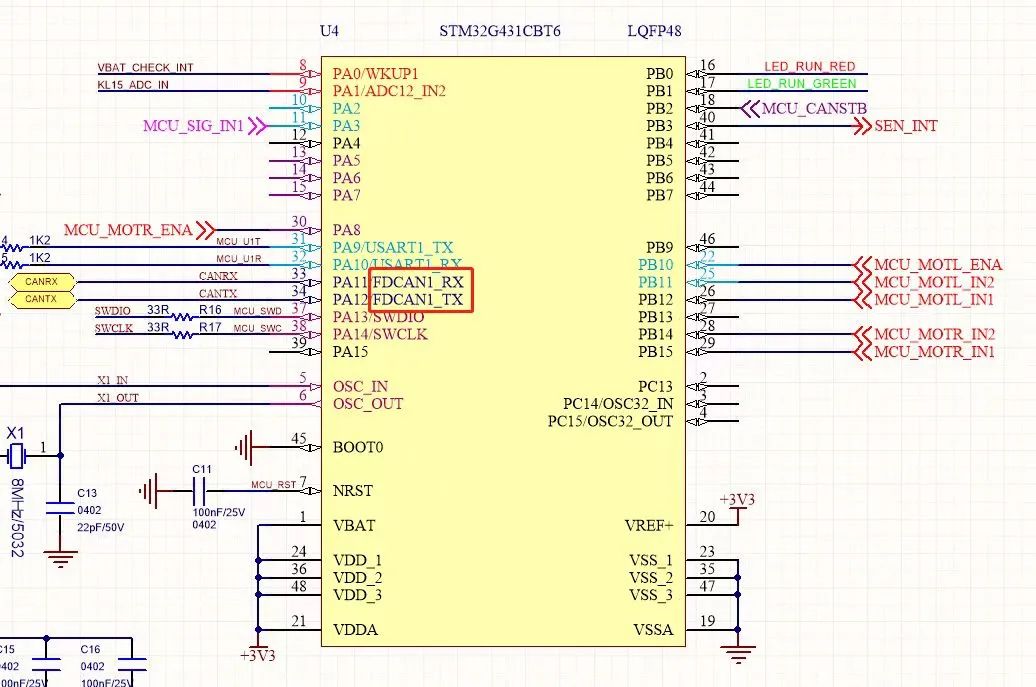
高爾夫數(shù)據(jù)采用直接在原車CAN FD或者車身網(wǎng)關(guān)接入,大眾車型的網(wǎng)關(guān)位置有三個,一個是主駕駛門內(nèi)置裝飾面板內(nèi),一個是方向盤下邊,方向機的CAN網(wǎng)絡(luò),另外一個是油門踏板上方的CAN網(wǎng)關(guān)位置。這三個相對來說,比較明顯,不用拆卸大量的裝飾面板。
數(shù)據(jù)可以通過2個渠道獲得,一是原廠的協(xié)議授權(quán),我估計這個不太現(xiàn)實,畢竟人家是呵呵,二是通過網(wǎng)關(guān),自行解碼DBC報文中CAN ID。這個可能性有幾種,一是CAN FD中混著有標(biāo)準(zhǔn)CAN數(shù)據(jù),比如某零部件就是用的CAN,如果要采集這個零部件的數(shù)據(jù),依舊采用標(biāo)準(zhǔn)CAN,一種是CAN FD,那么解析CAN FD中的字節(jié),必然會涉及長度、位移、算法,并且波特率還可能是變化的,不像標(biāo)準(zhǔn)CAN一樣,500K。那么,一款你覺得很普通的高爾夫,在這些數(shù)字技術(shù)面前,可能比做個寶馬奔馳要難很多了。
數(shù)據(jù)轉(zhuǎn)換有透明轉(zhuǎn)換、透明帶標(biāo)識轉(zhuǎn)換、自定義協(xié)議轉(zhuǎn)換的三種情況,這也是為什么大眾高爾夫8能用全新數(shù)字汽車這個來定義自己,核心功能模塊傳輸效率達到100M/s,“數(shù)字化”是全新一代高爾夫的關(guān)鍵詞,新技術(shù)的應(yīng)用還真的不是體現(xiàn)在汽車售價價格上的高低問題。以太網(wǎng)的部分,歸屬高爾夫的智能座艙,我們沒有深入研究,只是作為數(shù)據(jù)接口的端口。
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
通信技術(shù)
+關(guān)注
關(guān)注
20文章
1118瀏覽量
92209 -
CAN
+關(guān)注
關(guān)注
57文章
2720瀏覽量
463399
原文標(biāo)題:解碼大眾全新數(shù)字高爾夫8汽車CAN FD行駛功能電氣架構(gòu)
文章出處:【微信號:Thread_IOV,微信公眾號:速銳得車聯(lián)網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
汽車電子電氣架構(gòu)設(shè)計及優(yōu)化措施
示波器用于汽車CAN總線解碼的案例
怎么實現(xiàn)基于CAN總線的多功能汽車行駛記錄儀設(shè)計?
如何去搭建汽車電子電氣架構(gòu)
一文淺析汽車CAN-FD總線的通信應(yīng)用
力科發(fā)布CAN FD串行觸發(fā)和解碼方案,擴展汽車總線測試領(lǐng)導(dǎo)地位
大眾高爾夫在美停產(chǎn) 僅保留GTI和R
DS70000系列數(shù)字示波器在CAN-FD協(xié)議解碼上的應(yīng)用
CAN FD 如何使非汽車應(yīng)用受益
CAN FD是什么意思 優(yōu)點有哪些
解碼大眾全新數(shù)字高爾夫8汽車CAN FD行駛功能電氣架構(gòu)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論