 單片機到底是如何軟硬件結合的
單片機到底是如何軟硬件結合的
不知道大家有沒有疑惑,為什么軟件能控制硬件?反正當年我學習51的時候,有這個疑惑。今天我們就暫停軟件開發,分析單片機到底是如何軟硬件結合的。并通過一個基本的程序,分析單片機程序的編譯,運行。
軟硬件結合
初學者,通常有一個困惑,就是為什么軟件能控制硬件?就像當年的51,為什么只要寫P1=0X55,就可以在IO口輸出高低電平?要理清這個問題,先要認識一個概念:地址空間。
尋址空間
什么是地址空間呢?所謂的地址空間,就是PC指針的尋址范圍,因此也叫尋址空間。
大家應該都知道,我們的電腦有32位系統和64位系統之分,為什么呢?因為32位系統,PC指針就是一個32位的二進制數,也就是0xffffffff,范圍只有4G尋址空間。現在內存越來越大,4G根本不夠,所以需要擴展,為了能訪問超出4G范圍的內存,就有了64位系統。STM32是多少位的?是32位的,因此PC指針也是32位,尋址空間也就是4G。
我們來看看STM32的尋址空間是怎么樣的。在數據手冊《STM32F407_數據手冊.pdf》中有一個圖,這個圖,就是STM32的尋址空間分配。所有的芯片,都會有這個圖,名字基本上都是叫Memory map,用一個新芯片,就先看這個圖。
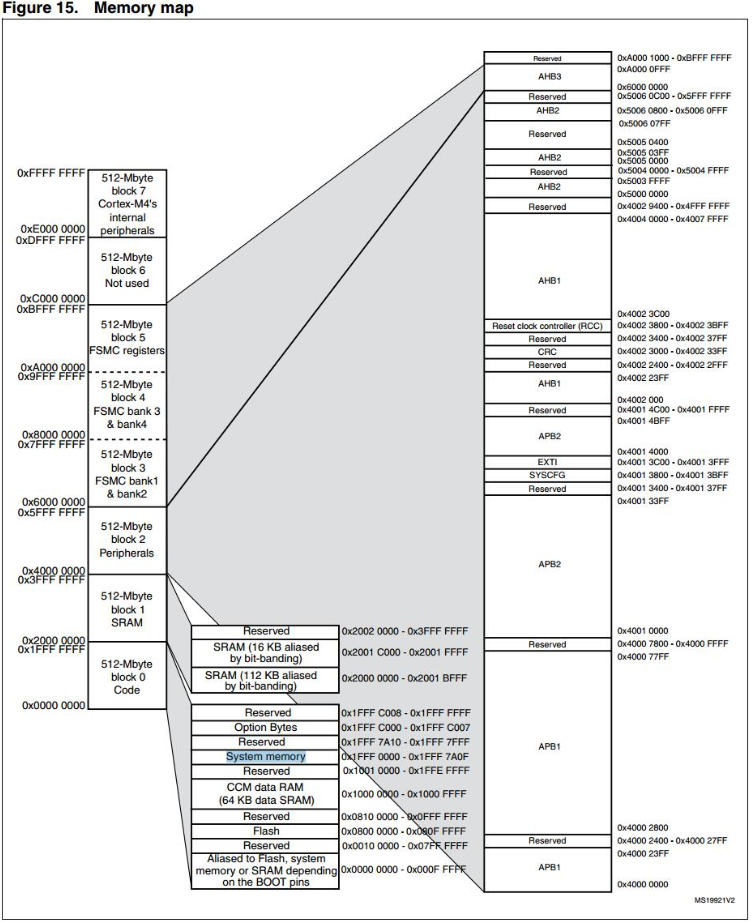
最左邊,8個block,每個block 512M,總共就是4G,也就是芯片的尋址空間。
block 0 里面有一段叫做FLASH,也就是內部FLASH,我們的程序就是下載到這個地方,起始地址是0X800 0000,大家注意,這個只有1M空間。現在STM32已經有2M flash的芯片了,超出1M的FLASH放在哪里呢?請自行查看對應的芯片手冊。
3 在block 1 內,有兩段SRAM,總共128K,這個空間,也就是我們前面說的內存,存放程序使用的變量。如果需要,也可以把程序放到SRAM中運行。407不是有196K嗎?
其實407有196K內存,但是有64k并不是普通的SRAM,而是放在block 0 內的CCM。這兩段區域不連續,而且,CCM只能內核使用,外設不能使用,例如DMA就不能用CCM內存,否則就死機。
block 2,是Peripherals,也就是外設空間。我們看右邊,主要就是APB1/APB2、AHB1/AHB2,什么東西呢?回頭再說。
block 3、block4、block5,是FSMC的空間,FSMC可以外擴SRAM,NAND FALSH,LCD等外設。
好的,我們分析了尋址空間,我們回過頭看看,軟件是如何控制硬件的。在IO口輸出的例程中,我們配置IO口是調用庫函數,我們看看庫函數是怎么做的。
例如:
GPIO_SetBits(GPIOG,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3);
這個函數其實就是對一個變量賦值,對GPIOx這個結構體的成員BSRRL賦值。
voidGPIO_SetBits(GPIO_TypeDef*GPIOx,uint16_tGPIO_Pin)
{
/*Checktheparameters*/
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BSRRL=GPIO_Pin;
}
assert_param:這個是斷言,用于判斷輸入參數是否符合要求GPIOx是一個輸入參數,是一個GPIO_TypeDef結構體指針,所以,要用->獲取其成員
GPIOx是我們傳入的參數GPIOG,具體是啥?在stm32f4xx.h中有定義。
#defineGPIOG((GPIO_TypeDef*)GPIOG_BASE)
GPIOG_BASE同樣在文件中有定義,如下:
#defineGPIOG_BASE(AHB1PERIPH_BASE+0x1800) AHB1PERIPH_BASE,AHB1地址,有點眉目了吧?在進一步看看 /*!
再找找PERIPH_BASE的定義
#definePERIPH_BASE((uint32_t)0x40000000)
到這里,我們可以看出,操作IO口G,其實就是操作0X40000000+0X1800這個地址上的一個結構體里面的成員。說白了,就是操作了這個地方的寄存器。實質跟我們操作普通變量一樣,就像下面的兩句代碼,區別就是變量i是SRAM空間地址,0X40000000+0X1800是外設空間地址。
u32i; i=0x55aa55aa;
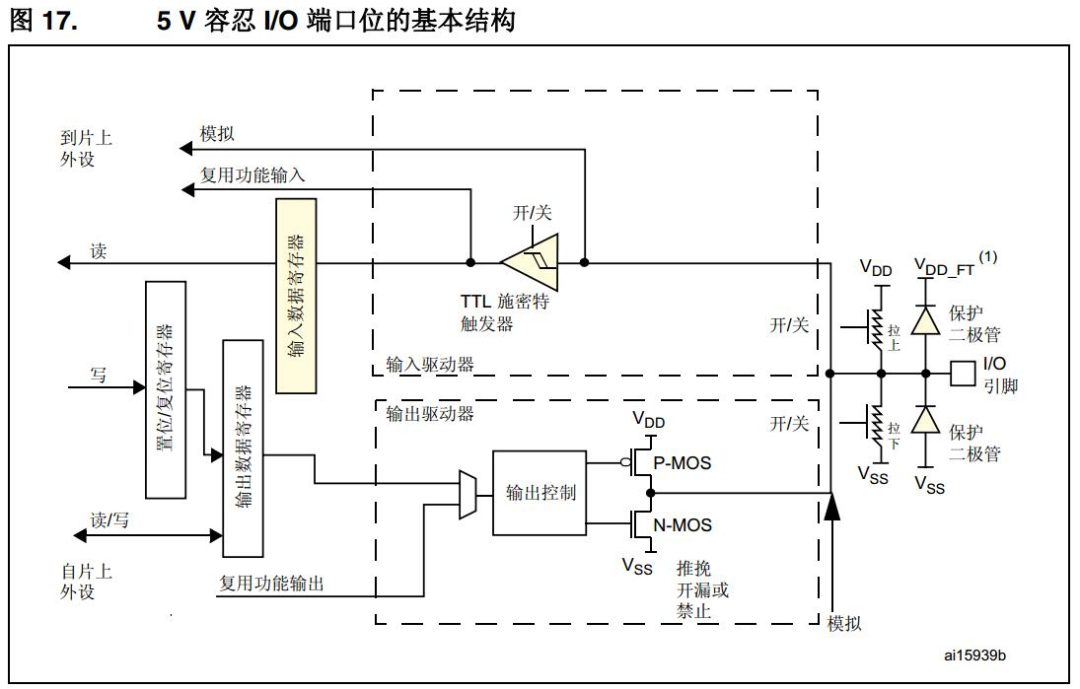
這個外設空間地址的寄存器是IO口硬件的一部分。如下圖,左邊的輸出數據寄存器,就是我們操作的寄存器(內存、變量),它的地址就是0X40000000+0X1800+0x14.
控制其他外設也類似,就是將數據寫到外設寄存器上,跟操作內存一樣,就可控制外設了。
寄存器,其實應該是內存的統稱,外設寄存器應該叫做特殊寄存器。慢慢的,所有人都把外設的叫做寄存器,其他的統稱內存或RAM。寄存器為什么能控制硬件外設呢?因為,粗略的說,一個寄存器的一個BIT,就是一個開關,開就是1,關就是0。通過這個電子開關去控制電路,從而控制外設硬件。
純軟件-包羅萬象的小程序
我們已經完成了串口和IO口的控制,但是我們僅僅知道了怎么用,對其他一無所知。程序怎么跑的?代碼到底放在哪里?內存又是怎么保存的?下面,我們通過一個簡單的程序,學習嵌入式軟件的基本要素。
分析啟動代碼
函數從哪里開始運行?
每個芯片都有復位功能,復位后,芯片的PC指針(一個寄存器,指示程序運行位置,對于多級流水線的芯片,PC可能跟真正執行的指令位置不一致,這里暫且認為一致)會復位到固定值,一般是0x00000000,在STM32中,復位到0X08000004。因此復位后運行的第一條代碼就是0X08000004。前面我們不是拷貝了一個啟動代碼文件到工程嗎?startup_stm32f40_41xxx.s,這個匯編文件為什么叫啟動代碼?因為里面的匯編程序,就是復位之后執行的程序。在文件中,有一段數據表,稱為中斷向量,里面保存了各個中斷的執行地址。復位,也是一個中斷。
芯片復位時,芯片從中斷表中將Reset_Handler這個值(函數指針)加載到PC指針,芯片就會執行Reset_Handler函數了。(一個函數入口就是一個指針)
;VectorTableMappedtoAddress0atReset AREARESET,DATA,READONLY EXPORT__Vectors EXPORT__Vectors_End EXPORT__Vectors_Size __VectorsDCD__initial_sp;TopofStack DCDReset_Handler;ResetHandler DCDNMI_Handler;NMIHandler DCDHardFault_Handler;HardFaultHandler DCDMemManage_Handler;MPUFaultHandler DCDBusFault_Handler;BusFaultHandler DCDUsageFault_Handler;UsageFaultHandler
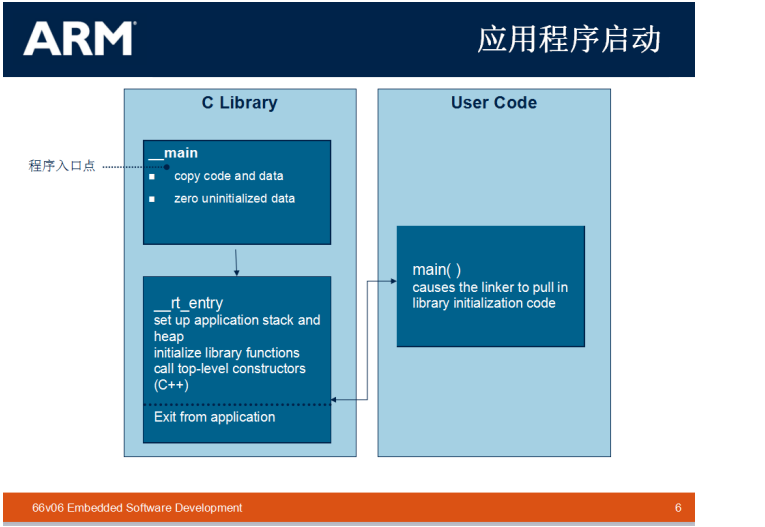
Reset_Handler函數,先執行SystemInit函數,這個函數在標準庫內,主要是初始芯片時鐘。然后跳到__main執行,__main函數是什么函數?
是我們在main.c中定義的main函數嗎?后面我們再說這個問題。
;Resethandler Reset_HandlerPROC EXPORTReset_Handler[WEAK] IMPORTSystemInit IMPORT__main LDRR0,=SystemInit BLXR0 LDRR0,=__main BXR0 ENDP
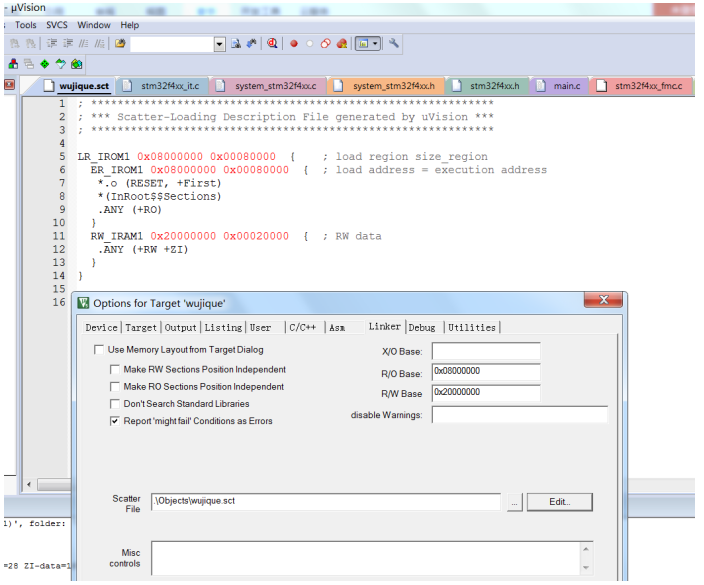
芯片是怎么知道開始就執行啟動代碼的呢?或者說,我們如何把這個啟動代碼放到復位的位置?這就牽涉到一個一般情況下不關注的文件wujique.sct,這個文件在wujiqueprjObjects目錄下,通常把這個文件叫做分散加載文件,編譯工具在鏈接時,根據這個文件放置各個代碼段和變量。
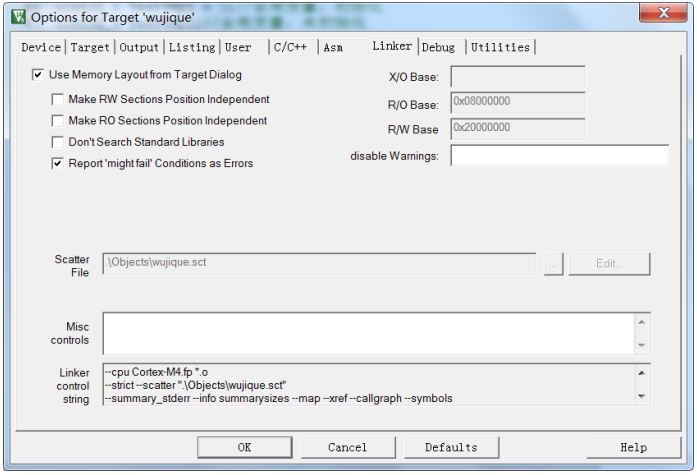
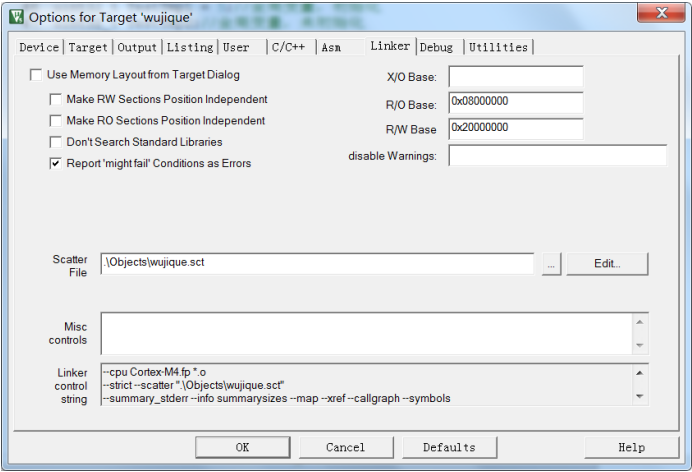
在MDK軟件Options菜單Linker下有關于這個菜單的設置。
把Use Memory Layout from Target Dialog前面的勾去掉,之前不可設置的框都可以設置了。點擊Edit進行編輯。
在代碼編輯框出現了分散加載文件內容,當前文件只有基本的內容。
其實這個文件功能很強大,通過修改這個文件可以配置程序的很多功能,例如:1 指定FLASH跟RAM的大小于起始位置,當我們把程序分成BOOT、CORE、APP,甚至進行驅動分離的時候,就可以用上了。2 指定函數與變量的位置,例如把函數加載到RAM中運行。
從這個基本的分散加載文件我們可以看出:
第6行 ER_IROM1 0x08000000 0x00080000定義了ER_IROM1,也就是我們說的內部FLASH,從0x08000000開始,大小0x00080000。
第7行 .o (RESET, +First)從0x08000000開始,先放置一個.o文件, 并且用(RESET, +First)指定RESET塊優先放置,RESET塊是什么?請查看啟動代碼,中斷向量就是一個AREA,名字叫RESET,屬于READONLY。這樣編譯后,RESET塊將放在0x08000000位置,也就是說,中斷向量就放在這個地方。DCD是分配空間,4字節,第一個就是__initial_sp,第二個就是Reset_Handler函數指針。也就是說,最后編譯后的程序,將Reset_Handler這個函數的指針(地址),放在0x800000+4的地方。所以芯片在復位的時候,就能找到復位函數Reset_Handler。
第8行 *(InRoot$$Sections)什么鬼?GOOGLE啊!回頭再說。
第9行 .ANY (+RO)意思就是其他的所有RO,順序往后放。就是說,其他代碼,跟著啟動代碼后面。
第11行 RW_IRAM1 0x20000000 0x00020000定義了RAM大小。
第12行 .ANY (+RW +ZI)所有的RW ZI,全部放到RAM里面。RW,ZI,也就是變量,這一行指定了變量保存到什么地址。
分析用戶代碼
到此,基本啟動過程已經分析完。下一步開始分析用戶代碼,就從main函數開始。1 程序跳轉到main函數后:RCC_GetClocksFreq獲取RCC時鐘頻率;SysTick_Config配置SysTick,在這里打開了SysTick中斷,10毫秒一次。
Delay(5);延時50毫秒。
intmain(void) { GPIO_InitTypeDefGPIO_InitStructure; /*!
2 初始化IO就不說了,進入while(1),也就是一個死循環,嵌入式程序,都是一個死循環,否則就跑飛了。
/*初始化LEDIO口*/ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG,ENABLE); GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT; GPIO_InitStructure.GPIO_OType=GPIO_OType_PP; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP; GPIO_Init(GPIOG,&GPIO_InitStructure); /*Infiniteloop*/ mcu_uart_open(3); while(1) { GPIO_ResetBits(GPIOG,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); Delay(100); GPIO_SetBits(GPIOG,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); Delay(100); mcu_uart_test(); TestFun(TestTmp2); }
3 在while(1)中調用TestFun函數,這個函數使用兩個全局變量,兩個局部變量。
/*Privatefunctions---------------------------------------------------------*/ u32TestTmp1=5;//全局變量,初始化為5 u32TestTmp2;//全局變量,未初始化 constu32TestTmp3[10]={6,7,8,9,10,11,12,13,12,13}; u8TestFun(u32x)//函數,帶一個參數,并返回一個u8值 { u8test_tmp1=4;//局部變量,初始化 u8test_tmp2;//局部變量,未初始化 staticu8test_tmp3=0;//靜態局部變量 test_tmp3++; test_tmp2=x; if(test_tmp2>TestTmp1) test_tmp1=10; else test_tmp1=5; TestTmp2+=TestTmp3[test_tmp1]; returntest_tmp1; }
然后程序就一直在main函數的while循環里面執行。中斷呢?對,還有中斷。中斷中斷,就是中斷正常的程序執行流程。我們查看Delay函數,uwTimingDelay不等于0就死等?誰會將uwTimingDelay改為0?
/** *@briefInsertsadelaytime. *@paramnTime:specifiesthedelaytimelength,inmilliseconds. *@retvalNone */ voidDelay(__IOuint32_tnTime) { uwTimingDelay=nTime; while(uwTimingDelay!=0); }
搜索uwTimingDelay變量,函數TimingDelay_Decrement會將變量一直減到0。
/** *@briefDecrementstheTimingDelayvariable. *@paramNone *@retvalNone */ voidTimingDelay_Decrement(void) { if(uwTimingDelay!=0x00) { uwTimingDelay--; } }
這個函數在哪里執行?經查找,在SysTick_Handler函數中運行。誰用這個函數?
/** *@briefThisfunctionhandlesSysTickHandler. *@paramNone *@retvalNone */ voidSysTick_Handler(void) { TimingDelay_Decrement(); }
經查找,在中斷向量表中有這個函數,也即是說這個函數指針保存在中斷向量表內。當發生中斷時,就會執行這個函數。當然,在進出中斷會有保存和恢復現場的操作。這個主要涉及到匯編,暫時不進行分析了。有興趣自己研究研究。通常,現在我們開發程序不用關心上下文切換了。
__VectorsDCD__initial_sp;TopofStack DCDReset_Handler;ResetHandler DCDNMI_Handler;NMIHandler DCDHardFault_Handler;HardFaultHandler DCDMemManage_Handler;MPUFaultHandler DCDBusFault_Handler;BusFaultHandler DCDUsageFault_Handler;UsageFaultHandler DCD0;Reserved DCD0;Reserved DCD0;Reserved DCD0;Reserved DCDSVC_Handler;SVCallHandler DCDDebugMon_Handler;DebugMonitorHandler DCD0;Reserved DCDPendSV_Handler;PendSVHandler DCDSysTick_Handler;SysTickHandler
余下問題
1 __main函數是什么函數?是我們在main.c中定義的main函數嗎?2 分散加載文件中*(InRoot$$Sections)是什么?3 ZI段,也就是初始化為0的數據段,什么時候初始化?誰初始化?
為什么這幾個問題前面留著不說?因為這是同一個問題。順藤摸瓜!
通過MAP文件了解代碼構成
編譯結果
程序編譯后,在下方的Build Output窗口會輸出信息:
***UsingCompiler'V5.06update5(build528)',folder:'C:Keil_v5ARMARMCCBin' Buildtarget'wujique' compilingstm32f4xx_it.c... ... assemblingstartup_stm32f40_41xxx.s... compilingmisc.c... ... compilingmcu_uart.c... linking... ProgramSize:Code=9038RO-data=990RW-data=40ZI-data=6000 FromELF:creatinghexfile... ".Objectswujique.axf"-0Error(s),0Warning(s). BuildTimeElapsed:00:00:32
編譯目標是wujique
C文件compiling,匯編文件assembling,這個過程叫編譯
編譯結束后,就進行link,鏈接。
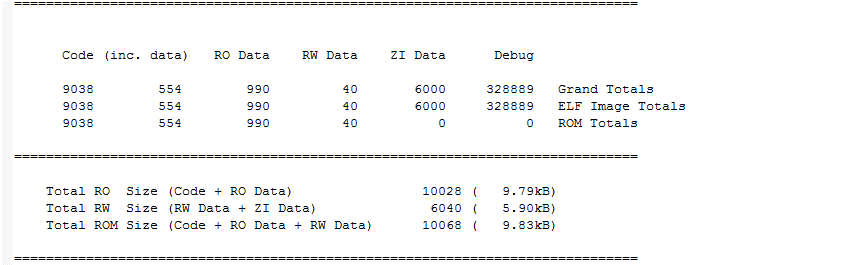
最后得到一個編譯結果,9038字節code,RO 990,RW 40,ZI 6000。CODE,是代碼,很好理解,那RO、RW、ZI都是什么?
FromELF,創建hex文件,FromELF是一個好工具,需要自己添加到option中才能用
map文件配置
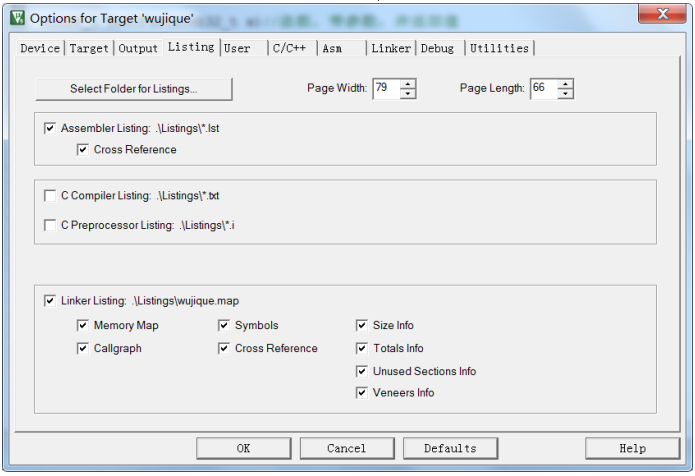
更多編譯具體信息在map文件中,在MDK Options中我們可以看到,所有信息都放在Listingswujique.map
默認很多編譯信息可能沒鉤,鉤上所有信息會增加編譯時間。
map文件
打開map文件,好亂?習慣就好。我們抓重點就行了。
map 總信息
從最后看起,看到沒?最后的這一段map內容,說明了整個程序的基本概況。
有多少RO?RO到底是什么?
有多少RW?RW又是什么?
ROM為什么不包括ZI Data?為什么包含RW Data?
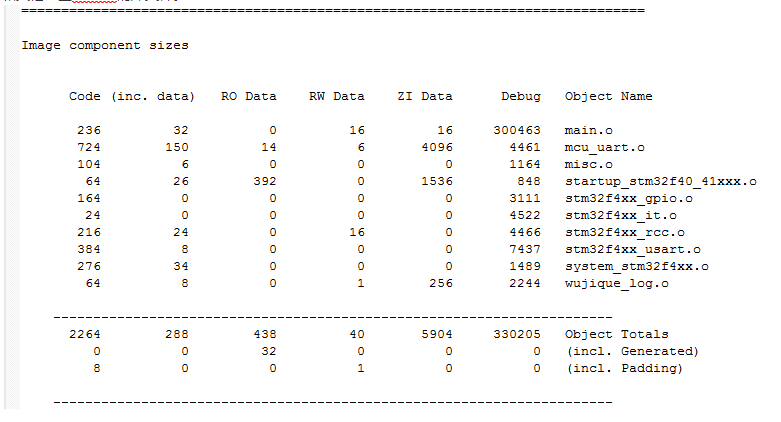
Image component sizes
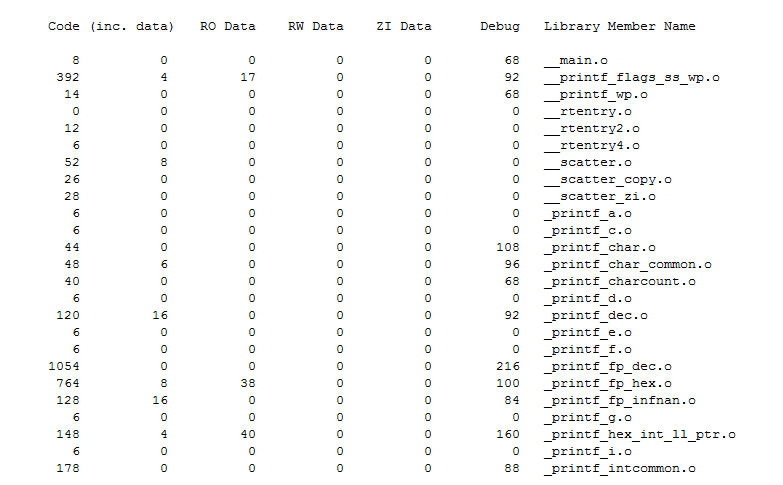
往上,看看Image component sizes,這個就比剛剛的總體統計更細了。
這部分內容,說明了每個源文件的概況
首先,是我們自己的源碼,這個程序我們的代碼不多,只有main.o,wujique_log.o,和其他一些STM32的庫文件。
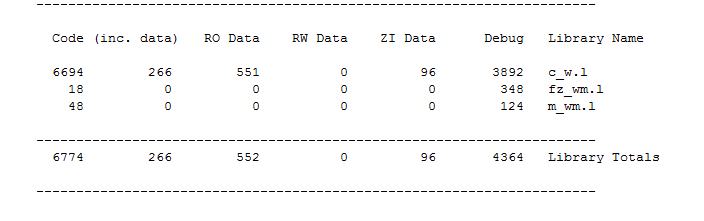
第2部分是庫里面的文件,看到沒?里面有一個main.o。main函數是不是我們寫的main函數?明顯不是,我們的main函數是放在main.o文件。這么小的一個工程,用了這么多庫,你以前關注過嗎?估計沒有,除非你曾經將一個原本在1M flash上的程序壓縮到能在512K上運行。
第3部分也是庫,暫時沒去分析這兩個是什么東西。
庫文件是什么?庫文件就是別人已經別寫好的代碼庫。在代碼中,我們經常會包含一些頭文件,例如:
#include#include #include
這些就是庫的頭文件。這些頭文件保存在MDK開發工具的安裝目錄下。我們經常用的庫函數有:memcpy、memcmp、strcmp等。只要代碼中包含了這些函數,就會鏈接庫文件。
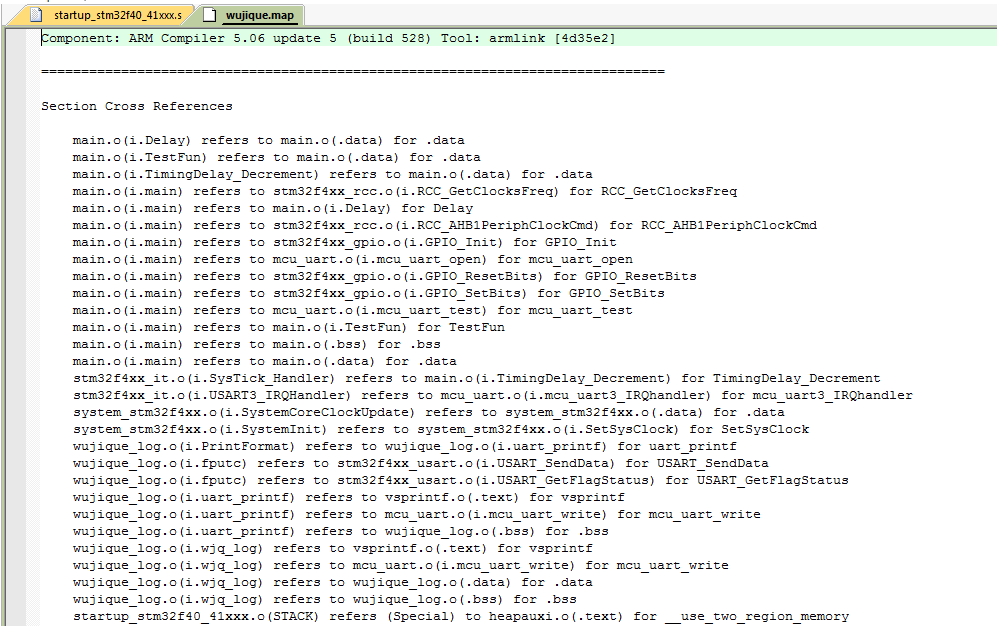
文件map
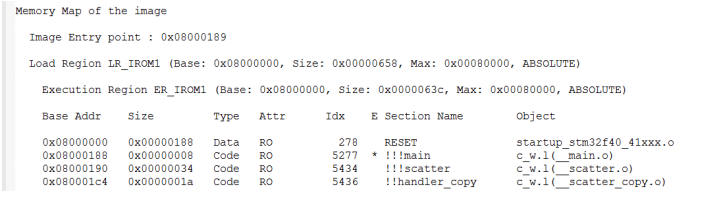
再往上,就是文件MAP了,也就是每個文件中的代碼段(函數)跟變量在ROM跟RAM中的位置。首先是ROM在0x08000000確實放的是startup_stm32f40_41xxx.o中的RESET
庫文件是什么?
庫文件就是別人已經別寫好的代碼庫。
在代碼中,我們經常會包含一些頭文件,例如:
#include#include #include
這些就是庫的頭文件。這些頭文件保存在MDK開發工具的安裝目錄下。
我們經常用的庫函數有:
memcpy、memcmp、strcmp等。
只要代碼中包含了這些函數,就會鏈接庫文件。
文件map
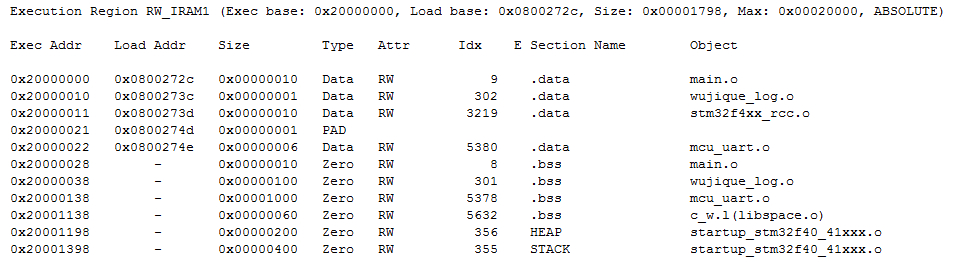
再往上,就是文件MAP了,也就是每個文件中的代碼段(函數)跟變量在ROM跟RAM中的位置。首先是ROM在0x08000000確實放的是startup_stm32f40_41xxx.o中的RESET
每個文件有有多行,例如串口,4個函數。
然后是RAM的,main.o中的變量,放在0x20000000,總共有0x0000000c,類型是Data、RW。串口有兩種變量,data和bss,什么是bss?這兩個名稱,是section name,也就是段的意思。看前面type和Attr,
RW Data,放在.data段;RW Zero放在.bss段,RW Zero,其實就是ZI。到底哪些變量是RW,哪些是ZI?
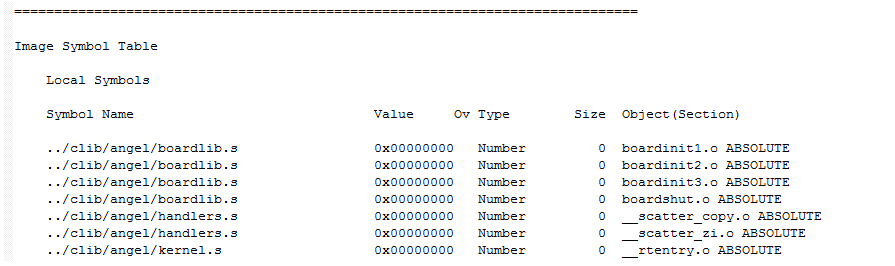
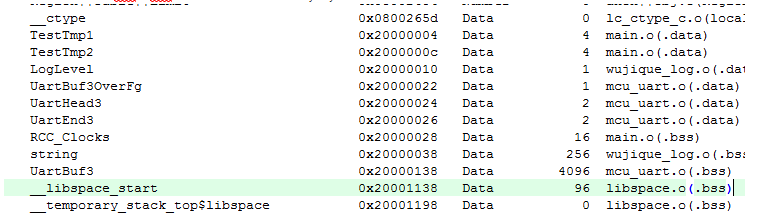
Image Symbol Table
再往上就是Image Symbol Table,就更進一步到每個函數或者變量的信息了
例如,全局變量TestTmp1,是Data,4字節,分配的位置是0x20000004。
TestTmp3數組放在哪里?放在0X080024E0這個地方,這可是代碼區額。因為我們用const修飾了這個全局變量數組,告訴編譯器,這個數組是不可以改變的,編譯器就將這個數組保存到代碼中了。程序中我們經常會使用一些大數組數據,例如字符點陣,通常有幾K幾十K大,不可能也沒必要放到RAM區,整個程序運行過程這些數據都不改變,因此通過const修飾,將其存放到代碼區。
const的用處比較多,可以修飾變量,也可以修飾函數。更多用法自行學習
那局部變量存放在哪里呢?我們找到了test_tmp3,
沒找到test_tmp1/test_tmp2,為什么呢?在定義時,test_tmp3增加了static定義,意思就是靜態局部變量,功能上,相當于全局變量,定義在函數內,限制了這個全局變量只能在這個函數內使用。那test_tmp1、test_tmp2放在哪里呢?局部變量,在編譯鏈接時,并沒有分配空間,只有在運行時,才從棧分配空間。
u8TestFun(u32x)//函數,帶一個參數,并返回一個u8值 { u8test_tmp1=4;//局部變量,初始化 u8test_tmp2;//局部變量,未初始化 staticu8test_tmp3=0;//靜態局部變量
上一部分,我們留了一個問題,哪些變量是RW,哪些是ZI?我們看看串口變量的情況,UartBuf3放在bss段,其他變量放在.data段。為什么數組就放在bss?bss是英文Block Started by Symbol的簡稱。
到這里,我們可解釋下面幾個概念了:
Code就是代碼,函數。
RO Data,就是只讀變量,例如用const修飾的數組。
RW Data,就是讀寫變量,例如全局變量跟static修飾的局部變量。
ZI Data,就是系統自動初始化為0的讀寫變量,大部分是數組,放在bss段。
RO Size等于代碼加只讀變量。
RW Size等于讀寫變量(包括自動初始化為0的),這個也就是RAM的大小。
ROM Size,也就是我們編譯之后的目標文件大小,也就是FLASH的大小。但是?為什么會包含RW Data呢?因為所有全局變量都需要一個初始化的值(就算沒有真正初始化,系統也會分配一個初始化空間),例如我們定義一個變量u8 i = 8;這樣的全局變量,8,這個值,就需要保存在FALSH區。
我們看看函數的情況,前面我們不是有一個問題嗎?__main和main是一個函數嗎?查找main后發現,main是main,放在0x08000579
main是main,放在0x08000189
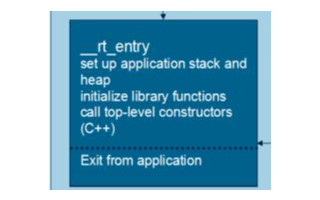
__main到main之間發生了什么?還記得分散加載文件中的這句嗎?
*(InRoot$$Sections)
__main就在這個段內。下圖是__main的地址,在0x08000189。__Vectors就是中斷向量,放在最開始。
在分散加載文件中,緊跟RESET的就是*(InRoot$$Sections)。
而且,RESET段正好大小0x00000188。
巧合?參考PPT文檔《ARM嵌入式軟件開發.ppt》,或自行GOOGLE。
這一段代碼都完成什么功能呢?主要完成ZI代碼的初始化,也就是將一部分RAM初始化為0。其他環境初始化。。。。通常,我們不用管這一部分。
其他再往上,就是其他信息了,例如優化了哪些東西,移除了哪些函數。
最后
到這里,一個程序,是怎么組成的,程序是如何運行的,基本有一個總體印象了。不過,對于中斷,后面還會進行詳細說明。
責任編輯:彭菁










-
芯片
+關注
關注
454文章
50460瀏覽量
421973 -
單片機
+關注
關注
6032文章
44525瀏覽量
633261 -
硬件
+關注
關注
11文章
3260瀏覽量
66132 -
程序
+關注
關注
116文章
3778瀏覽量
80860 -
軟硬件
+關注
關注
1文章
289瀏覽量
19184
原文標題:干貨 | 單片機到底是如何軟硬件結合的?
文章出處:【微信號:玩轉單片機與嵌入式,微信公眾號:玩轉單片機與嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
單片機是怎么做到軟硬件結合的

AVR單片機軟硬件設計教程入門篇
為什么軟件能控制硬件?單片機到底是如何軟硬件結合的
單片機測控系統的軟硬件平臺技術
深度解剖單片機是如何軟硬件結合的并分析單片機程序的編譯,運行

單片機中為什么軟件能控制硬件?

深度:單片機到底是如何軟硬件結合的?

單片機到底是如何軟硬件結合的
深度:單片機到底是如何軟硬件結合的






 工商網監
工商網監
評論