") 10 BASE 以太網(wǎng)與CAN-XL有哪些不同點(diǎn)呢?
10 BASE 以太網(wǎng)與CAN-XL有哪些不同點(diǎn)呢?
隨著EEA-Zonal的架構(gòu)概念不斷發(fā)展,為了充分利用這種新架構(gòu)的優(yōu)勢(shì),顯然需要將以太網(wǎng)連接擴(kuò)展到終端傳感器和驅(qū)動(dòng)器。現(xiàn)有的傳統(tǒng)連接技術(shù)(如FlexRay和CAN)通常要求在網(wǎng)關(guān)中實(shí)現(xiàn)協(xié)議轉(zhuǎn)換,這可能導(dǎo)致成本、復(fù)雜性和延時(shí)增加。現(xiàn)有的汽車以太網(wǎng)技術(shù)(如100BASE-T1)需要使用點(diǎn)對(duì)點(diǎn)交換連接,無(wú)法滿足支持終端連接應(yīng)用向以太網(wǎng)過(guò)渡的系統(tǒng)成本要求。
10BASE-T1S提供缺失的鏈接,通過(guò)優(yōu)化的以太網(wǎng)到邊緣連接支持這種過(guò)渡。在這個(gè)部署過(guò)程中,仍然需要克服一些問(wèn)題,例如以太網(wǎng)連接會(huì)增加模塊實(shí)施方案的元件成本和復(fù)雜性。10BASE-T1S通過(guò)降低系統(tǒng)成本,以及提供多種支持不同類型的信號(hào)鏈分區(qū)的產(chǎn)品選擇來(lái)解決這些問(wèn)題。
一、10BASE-T1S 介紹
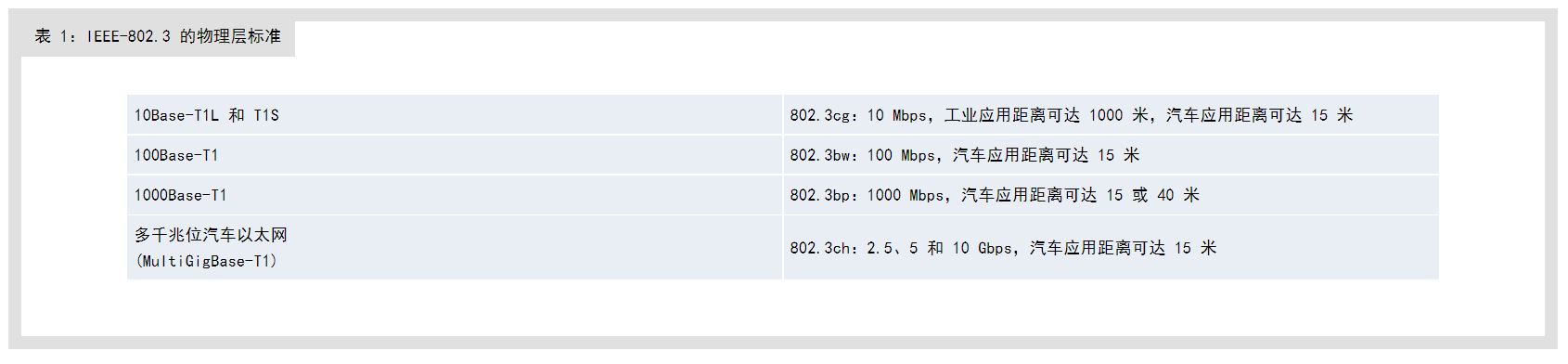
IEEE開發(fā)了以太網(wǎng)標(biāo)準(zhǔn)的一種新變體,它在單對(duì)物理層上提供10Mbit/s的帶寬。這一規(guī)范被稱為IEEE Std 802.3cg-2019,并于2020年初發(fā)布。它主要包括兩個(gè)協(xié)議標(biāo)準(zhǔn):10Base-T1L和10Base-T1S。
10Base-T1L是10Mbit/s的SPE(Single Pair Ethernet)的遠(yuǎn)距離變體,允許電纜長(zhǎng)度達(dá)到1000米。這種點(diǎn)對(duì)點(diǎn)的變體可應(yīng)用于卡車、火車和其他車輛技術(shù),也可用于工業(yè)4.0。通過(guò)該協(xié)議,可以打破在工廠執(zhí)行一線服務(wù)的基本操作設(shè)備(傳感器、閥門、執(zhí)行器和控制器)與實(shí)現(xiàn)新型智能工廠所需的智能企業(yè)數(shù)據(jù)、比特和字節(jié)庫(kù)之間的障礙。然而,對(duì)于汽車應(yīng)用而言,這種變體并不適用。
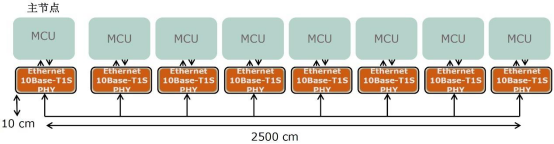
10Base-T1S提供端到端的短距離全雙工傳輸,或者是半雙工的多對(duì)多傳輸,適用于汽車應(yīng)用。10BASE-T1S與其他汽車以太網(wǎng)技術(shù)的不同之處在于,它支持多點(diǎn)拓?fù)浣Y(jié)構(gòu),所有節(jié)點(diǎn)都通過(guò)同一對(duì)非屏蔽雙絞線連接。這種總線配置提供了一個(gè)優(yōu)化的BOM(Bill of Materials),只需在每個(gè)節(jié)點(diǎn)上部署一個(gè)以太網(wǎng)PHY,而無(wú)需采用與其他以太網(wǎng)技術(shù)相關(guān)的交換機(jī)或星型拓?fù)洹T摌?biāo)準(zhǔn)規(guī)定必須支持至少8個(gè)節(jié)點(diǎn)(可以支持更多節(jié)點(diǎn)),總線長(zhǎng)度必須達(dá)到25米。 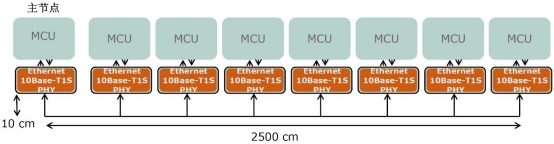 ?
?
10Baes-T1S 總線式以太網(wǎng)
在使用10BASE-T1S總線拓?fù)鋾r(shí),需要特別關(guān)注服務(wù)質(zhì)量,因此采用了一種稱為物理層沖突規(guī)避(PLCA)的輪詢機(jī)制。PLCA的目的是避免共享網(wǎng)絡(luò)上的沖突,不像FlexRay中使用固定調(diào)度會(huì)浪費(fèi)未使用的傳輸時(shí)隙,相比CAN系列規(guī)范,PLCA使用了更高的帶寬利用率。
PLCA是對(duì)CSMA/CD的擴(kuò)展,其目標(biāo)是改進(jìn)以太網(wǎng)在多分叉(總線)拓?fù)浣Y(jié)構(gòu)上現(xiàn)有碰撞檢測(cè)機(jī)制(CSMA/CD)在吞吐量、延遲和公平性方面的表現(xiàn)。這種仲裁純粹在物理層進(jìn)行,MAC在以下描述的過(guò)程中不承擔(dān)任何作用。啟動(dòng)PLCA后,只有具有傳輸機(jī)會(huì)的物理層設(shè)備被允許發(fā)送數(shù)據(jù)。傳輸機(jī)會(huì)以循環(huán)方式分配。每個(gè)物理層設(shè)備可以在其傳輸機(jī)會(huì)期間發(fā)送信息幀。當(dāng)主節(jié)點(diǎn)發(fā)送信標(biāo)時(shí),新的周期開始。
 ?
?
PLCA 循環(huán)示例
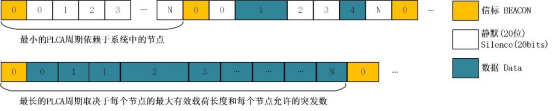
在PLCA系統(tǒng)中,每個(gè)物理層設(shè)備(PHY)都被分配一個(gè)獨(dú)一無(wú)二的PHY ID,范圍從0到255。PHY ID為0的設(shè)備是PLCA協(xié)調(diào)器。每個(gè)PHY設(shè)備都知道系統(tǒng)中PHY設(shè)備的數(shù)量。PLCA采用輪詢方案,每個(gè)輪次由PLCA協(xié)調(diào)器發(fā)送一個(gè)信標(biāo)(BEACON)來(lái)觸發(fā)。在PLCA方案中,每個(gè)參與者(包括協(xié)調(diào)器)按照PHY ID的順序,在信標(biāo)之后都有一個(gè)發(fā)送機(jī)會(huì)。
如果一個(gè)節(jié)點(diǎn)沒(méi)有待發(fā)送的數(shù)據(jù),系統(tǒng)中的下一個(gè)PHY設(shè)備將在超時(shí)時(shí)間后獲得機(jī)會(huì)。如果節(jié)點(diǎn)有待傳輸?shù)臄?shù)據(jù),允許在其傳輸機(jī)會(huì)內(nèi)開始傳輸幀。如果系統(tǒng)配置允許,節(jié)點(diǎn)還可以進(jìn)行突發(fā)傳輸,即發(fā)送多個(gè)幀,每個(gè)消息的有效載荷長(zhǎng)度可以不同。
這種調(diào)度方案避免了總線沖突和重傳,降低了帶寬的使用,并保證了系統(tǒng)內(nèi)傳輸機(jī)會(huì)的公平性。實(shí)踐中觀察到兩個(gè)節(jié)點(diǎn)之間的往返延遲小于半毫秒,在使用iperf3工具測(cè)量IP網(wǎng)絡(luò)上的最大可實(shí)現(xiàn)帶寬時(shí),幾乎可以達(dá)到10Mbit/s的全速。在這種PLCA機(jī)制的基礎(chǔ)上,可以在MAC層啟用CBS或TAS等功能。
目前,數(shù)據(jù)線傳輸功率(PoDL)的傳輸尚未完全標(biāo)準(zhǔn)化,但已有一些工作組在研究和制定相關(guān)標(biāo)準(zhǔn)。IEEE正在擴(kuò)展802.3cg規(guī)范,其中包括添加PoDL功能。10BASE-T1S的物理層是交流耦合的,因此可以為遠(yuǎn)程設(shè)備提供電力。
10BASE-T1S主要具有以下五個(gè)特點(diǎn):多點(diǎn)物理層、無(wú)沖突、高效的帶寬利用、確定性和低延遲、安全機(jī)制。基于這些特點(diǎn),10BASE-T1S非常適用于傳統(tǒng)汽車網(wǎng)絡(luò)中的各種應(yīng)用場(chǎng)景。
二、10BASE-T1S 與CAN-XL 對(duì)比
降低系統(tǒng)復(fù)雜性和成本一直是合理的訴求。從長(zhǎng)遠(yuǎn)來(lái)看,由于以太網(wǎng)完全覆蓋了FlexRay和MOST的應(yīng)用領(lǐng)域,因此FlexRay和MOST很可能被替換,只保留CAN和以太網(wǎng)。以太網(wǎng)適用于娛樂(lè)、ADAS、車聯(lián)網(wǎng)等系統(tǒng),工作速率在100~1000Mbit/s之間;而CAN/CAN-FD適用于發(fā)動(dòng)機(jī)管理和車身控制等系統(tǒng),工作速率在0.5~5Mbit/s之間。考慮到車載網(wǎng)絡(luò)系統(tǒng)中大約90%的控制器節(jié)點(diǎn)的通信速率低于10Mbit/s,因此10Mbit/s的通信速率可以滿足廣泛的應(yīng)用需求,無(wú)論是音頻、雷達(dá)、超聲波傳感器還是底盤控制。因此,CAN-XL和以太網(wǎng)10BASE-T1S在這個(gè)領(lǐng)域存在競(jìng)爭(zhēng)關(guān)系。
這兩種協(xié)議的開發(fā)都是為了滿足新的電子/電氣架構(gòu)要求,并在10Mbit/s的區(qū)域提供預(yù)期的性能。這兩種協(xié)議都提供相同的數(shù)據(jù)速率,允許應(yīng)用傳輸更長(zhǎng)的有效載荷,并在總線上實(shí)現(xiàn)接近10Mbit/s的傳輸速度。然而,它們的介質(zhì)訪問(wèn)方案不同。接下來(lái)將對(duì)它們的數(shù)據(jù)報(bào)效率和總線循環(huán)效率進(jìn)行對(duì)比。
2.1數(shù)據(jù)報(bào)的效率
兩種協(xié)議在數(shù)據(jù)報(bào)中都有頭部和尾部的開銷,包括尋址、協(xié)議字段和CRC等。在CAN-XL中,仲裁階段和數(shù)據(jù)階段的填充位以及不同的總線速度會(huì)進(jìn)一步影響效率。
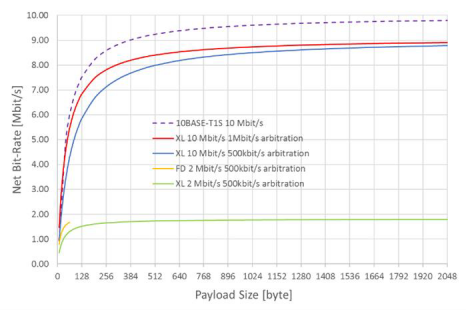
通過(guò)將開銷量與有效負(fù)載位上的時(shí)間開銷相關(guān)聯(lián),可以繪制出數(shù)據(jù)報(bào)在有效負(fù)載上的效率曲線。CAN-XL的仲裁階段較慢,報(bào)頭較大,開銷較高。以1Mbit/s而不是500kbit/s的速度運(yùn)行仲裁階段可以顯著提高數(shù)據(jù)報(bào)的效率,特別對(duì)于較短的幀來(lái)說(shuō)效果更為顯著。
 ?
?
數(shù)據(jù)報(bào)的效率比較
2.2總線循環(huán)效率
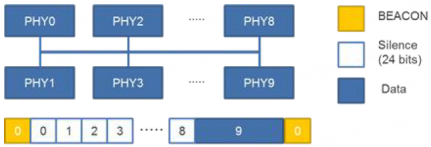
如果我們觀察PLCA循環(huán)而不是單個(gè)數(shù)據(jù)報(bào),情況將會(huì)有所改變。假設(shè)系統(tǒng)配置如圖所示,并假設(shè)只有PHY9有待處理的傳輸。
PLCA 循環(huán)示例
在這種情況下,假設(shè)總線保持未使用狀態(tài)的時(shí)間是靜默時(shí)間(24位)的9倍。另外,考慮到BEACON所需的額外時(shí)間,數(shù)據(jù)傳輸?shù)男蕦?huì)發(fā)生變化,具體情況如圖所示。 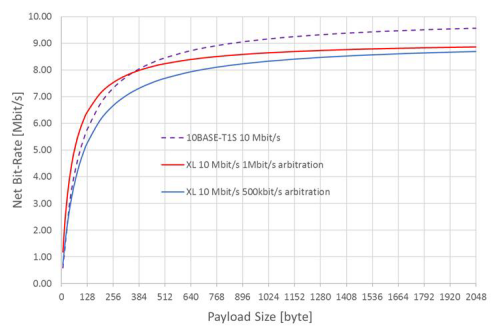
總線循環(huán)效率示例
在CAN-XL中,等待任何傳輸機(jī)會(huì)不會(huì)降低總線效率,但我們?nèi)孕枰紤]空閑時(shí)間和EOF序列。在典型工作條件下,具有512字節(jié)有效載荷的情況下,CAN-XL和10Base-T1S兩種協(xié)議表現(xiàn)出相同的效率。然而,這兩種協(xié)議的效率取決于具體的用例、系統(tǒng)配置以及是否使用擴(kuò)展功能。
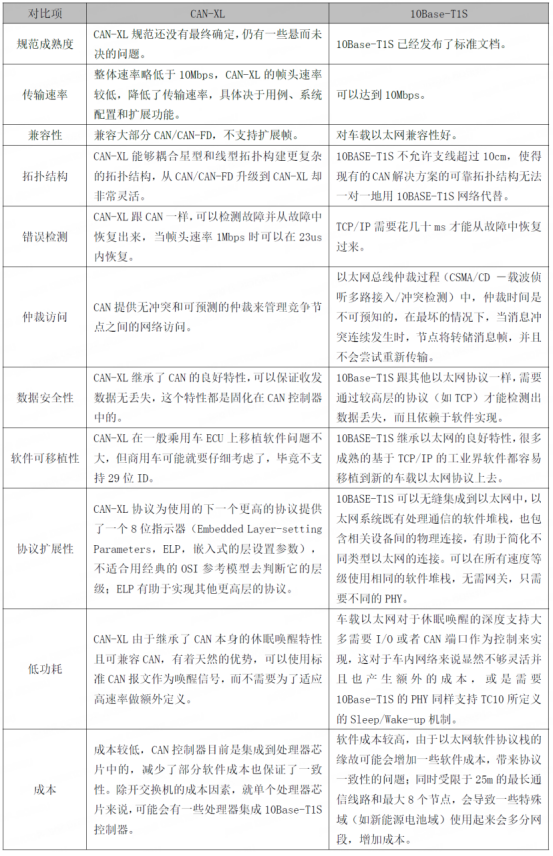
此外,我們還需要考慮到更高級(jí)別協(xié)議的可用性以及其他增強(qiáng)功能,例如安全性或電力傳輸。10Base-T1S和CAN-XL是兩種不同的技術(shù),在發(fā)布的標(biāo)準(zhǔn)中有一些區(qū)別,具體可以參考下表。
 ?
?
與10BASE-T1S相比,CAN-XL能夠耦合星型和線型拓?fù)洌瑥亩鴺?gòu)建更復(fù)雜的拓?fù)浣Y(jié)構(gòu)。由于10BASE-T1S不允許支線超過(guò)10cm的長(zhǎng)度,這導(dǎo)致現(xiàn)有的CAN解決方案的可靠拓?fù)浣Y(jié)構(gòu)無(wú)法直接用10BASE-T1S網(wǎng)絡(luò)來(lái)替代。然而,從CAN/CAN-FD升級(jí)到CAN-XL卻非常靈活,這得益于在布線和線束方面投入了大量的專業(yè)知識(shí)和開發(fā)時(shí)間。
正是這種平滑的升級(jí)過(guò)程,使得關(guān)注緊湊型和中型汽車的原始設(shè)備制造商(OEM)對(duì)采用CAN-XL產(chǎn)生了濃厚的興趣。CAN-XL在現(xiàn)有車輛架構(gòu)的基礎(chǔ)上提供了一個(gè)理想的開發(fā)平臺(tái),無(wú)需重新設(shè)計(jì)線束、控制器和協(xié)議棧。與IP相比,CAN的協(xié)議棧更為簡(jiǎn)單,這使得可以使用體積更小、成本更低的微控制器。CAN-XL的目標(biāo)之一就是繼續(xù)保持這一傳統(tǒng)優(yōu)勢(shì)。
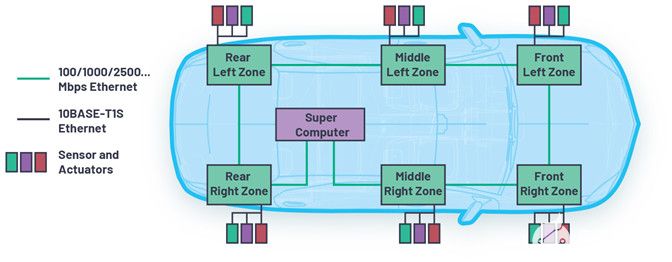
而10BASE-T1可以替代CAN、CAN-FD、LIN、FlexRay或音頻等連接,在以太網(wǎng)架構(gòu)下,可以在任何地方使用相同的軟件堆棧和通信機(jī)制。只需根據(jù)各網(wǎng)絡(luò)段的特定速度等級(jí)更換PHY和線纜。例如,1000BASE-T1用于骨干網(wǎng)絡(luò),100BASE-T1用于診斷和軟件下載,而10BASE-T1S用于車身和動(dòng)力傳動(dòng)系統(tǒng)的通信。整個(gè)以太網(wǎng)架構(gòu)無(wú)需任何網(wǎng)關(guān),而CAN-XL則需要網(wǎng)關(guān)來(lái)實(shí)現(xiàn)協(xié)議轉(zhuǎn)換,這可能會(huì)增加成本、復(fù)雜性和延遲。在Zonal架構(gòu)中,10BASE-T1S能夠完美匹配。
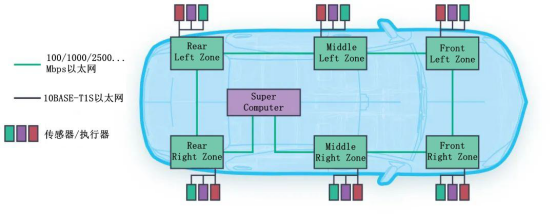
汽車Zonal 架構(gòu)
10BASE-T1S和CAN-XL各有其優(yōu)勢(shì)。這兩種協(xié)議都有可能在同一個(gè)車載網(wǎng)絡(luò)的不同應(yīng)用中使用。CAN-XL和10BASE-T1S可以共同提供連接,在基于信號(hào)的通信和面向服務(wù)的通信之間進(jìn)行橋接。通過(guò)適當(dāng)擴(kuò)展協(xié)議層,可以為應(yīng)用程序提供更多的可能性。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2548文章
50701瀏覽量
752078 -
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
52文章
8164瀏覽量
146034 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5381瀏覽量
171137 -
交換機(jī)
+關(guān)注
關(guān)注
21文章
2624瀏覽量
99273 -
PHY
+關(guān)注
關(guān)注
2文章
301瀏覽量
51700
原文標(biāo)題:10 BASE 以太網(wǎng)與CAN-XL 對(duì)比
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
以太網(wǎng)接口10-100Base-T引腳定義
以太網(wǎng)10/100Base-T 接口 以太網(wǎng) 100Base
布線技巧四:10Base—T/2/5/F/35—以太網(wǎng)
力科推出100/10BASE-T以太網(wǎng)解碼軟件
車載以太網(wǎng)和CAN的區(qū)別
以太網(wǎng)轉(zhuǎn)CAN網(wǎng)關(guān)應(yīng)該如何連接使用
為何10BASE-T1S是汽車通信中缺失的以太網(wǎng)鏈路
以太網(wǎng)筆記:快速以太網(wǎng)100Base-TX接口及編碼
以太網(wǎng)can網(wǎng)關(guān)TCP Client模式是怎么工作的呢?
單對(duì)以太網(wǎng):如何實(shí)現(xiàn)10Base-T1L

10 BASE以太網(wǎng)與CAN-XL對(duì)比分析
單對(duì)以太網(wǎng):如何實(shí)現(xiàn) 10Base-T1L
10BASE-T1S車載以太網(wǎng)簡(jiǎn)介及網(wǎng)絡(luò)架構(gòu)

車載以太網(wǎng)10BASE-T1S通信解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論