 如何設計一個更快更魯棒的P3P求解器?
如何設計一個更快更魯棒的P3P求解器?
P3P 問題是經典的多視圖幾何問題之一,其中標定的相機的絕對位姿由三個 2D-3D 對應關系決定。由于這是許多視覺系統的關鍵(例如定位和SfM),因此過去有很多研究關注于如何開發更快、更穩定的P3P算法。雖然當前SOTA的求解器既非常快又穩定,但仍然存在可能崩潰的配置。本文將問題代數化為尋找兩個圓錐的交點。通過這個方式,我們能夠分析表征多項式系統的實根,并為每個問題實例采用量身定制的解決方案。這導出了一個快速穩定的P3P求解器,它能夠正確解決其它方法可能會失敗的情況。實驗評估表明,該方法在速度和成功率方面都優于當前的SOTA方法。
1 什么是P3P問題
PnP是指根據2D-3D對應關系集合估計相機絕對位姿,集合最小的情況是P3P問題。P3P是將2D-3D對應關系通過相機內參轉換為3D-3D對應關系進行求解。給定世界坐標系中的3個3D點以及它們對應的歸一化圖像點,兩個點集通過剛體變換關聯:
其中是某個正數。P3P的目標是求解其中的旋轉和平移。
2 P3P問題發展史
P3P作為一個幾何問題歷史悠久,比計算機視覺領域的出現都要早很久。早在1773年Lagrange就在研究這個問題,Lagrange證明該問題最多可能有4個實數解,可以轉化為4次多項式問題求解。大約1個世紀后,1841年德國數學家Grunert重新研究了該問題,給出了一種直接求解方法。20世紀早期,該問題在攝影測量領域內受到關注,但主要關注點在于精調而不是從頭求解。Finstenvalder和Scheufele在1937年證明P3P問題只需要找到1個三次多項式的1個根和2個二次多項式的根。該問題后來在1981年Fischler和Bolles的RANSAC論文重新露面,由于RANSAC的成功,該問題也開始受到很大的關注。
根據最后需要求解的一元多項式的階次,P3P問題可分為兩大類:求解1個四次方程和求解1個三次方程。
最近的大多數工作關注于將P3P問題轉化為求解四次方程問題。Gao等人在2003年用吳零點分解法第一次給出了P3P的完成解析解。Kneip等人2011年提出了一種直接由計算相機絕對位置和旋轉的方式求解P3P問題的方法,避免了特征值分解或奇異值分解。Ke等人2017年提出用相應的幾何約束確定相機的旋轉。Banno和Nakano分別于2018和2019提出了P3P的直接求解法,通過估計中間坐標系中的距離,使得旋轉矩陣可以形式化為距離的線性表示。
與基于四次方程的方法不同,基于三次方程的方法在P3P問題的文獻中沒有得到太多關注。自Finstenvalder和Scheufele在1937年的工作以來,Grafarend等人在1989年也使用了三次方程,他們試圖將(3)簡化為齊次形式,然后使用與Finstenvalder和Scheufele相同的技術求解。Haralick等人在1991年回顧了P3P問題的主要基于三次方程的解法,并討論了數值精度。最近,Persson和Nordberg在2018年展示了關于尋找旋轉和平移的更多細節,并提出了一種使用三次方程的一個根的有效算法,該方法比以前的方法有更好的數值精度,并且更快。
3 P3P問題轉化為兩個圓錐曲線相交問題
參照Persson和Nordberg在2018年的解法,為了消除旋轉和平移參數,如圖1所示,有如下約束:
根據余弦定理,
其中。我們的目標是找到的解,從而求解旋轉和平移。我們可以假設,不然3D點就和相機中心一樣了。將(3)中前兩個式子除以第三個式子,并通過變量替換,可以得到以下二元二次方程組:
其中
現在問題變為求兩個二次方程的實數解,也就是說找到兩個圓錐曲線的實數交點。
4 本文的方法
本文的方法的基本思路也是求解兩個圓錐曲線的相交問題。(4)和(5)的兩個二次方程可以重寫為:
其中為的矩陣。為了找到交點,首先構造一個矩陣
交點可通過構建一個與真正的解相交的退化圓錐曲線找到。退化圓錐曲線由以下命題給出:
命題1(退化圓錐曲線,見《計算機視覺中的多視圖幾何》)如果矩陣 不滿秩,則圓錐曲線退化。退化點的圓錐曲線是兩條線(秩為2)或一條重復線(秩為1),可以寫為:
其中。
退化圓錐曲線被構造出來后,可以被分解為(至多)兩條直線(和),可以進一步很容易地與原來的兩個圓錐曲線相交。
4.1 尋找退化圓錐曲線
根據定理1,退化圓錐曲線需要非滿秩,即行列式為0:
得到關于的三次方程。求解(11)可以得到的值,并得到矩陣。注意原始方程組的任何解(同時屬于圓錐曲線)也在退化圓錐曲線上。
對于(11)中的每個解,都可以得到一個退化圓錐曲線。根據(10),退化圓錐曲線是兩條直線和的組合。那么如何將退化圓錐曲線分解為兩條直線呢?
4.1.1 方法一:直接求解直線
這里展示一種尋找直線的直接方法。假定已經找到了一個退化圓錐曲線,寫為如下形式:
由于,假設,矩陣也可以寫為:
假定,令,則
根據(14)和(15)可以解出, 進而根據(16)和(17)可求得。在這種情況下,可以得到一對直線和。為了避免的情況,可以找到的絕對值最大的對角線元素,更穩定地計算出直線對。
4.1.2 方法二:通過求兩直線相交求解直線
由于兩直線參數的叉乘可得交點,可以進而從中提取出兩直線。對于交點,這里展示兩種求法:
(1) 零空間法:根據(10)可知, 交點在的零空間內,對于的任意零空間向量,有。我們現在必須找到,使得的尺度與(以及)一致。由于,我們有
結合(12),(13)和(18),可以推導出的范數和的元素之間的關系:
因此,可以將以正確的尺度適當地重新縮放得到交點。
(2) 伴隨矩陣法:矩陣的伴隨矩陣應滿足:
證明:通過(13)可以得到
與相等。
給定一個矩陣,可以得到。為了避免0元素,可以找到其對角線最大的元素和對應的列,交點可以通過將該列除以對角線的平方根得到。
恢復直線:得到交點之后,根據其反對稱矩陣
定義一個新的矩陣
結合(22)和(10)可得。直線對可以通過的行和列得到。
秩為1的情況:如果退化圓錐曲線包括一對重復的直線,則矩陣的秩為1。在這種情況下,可以直接從一行或一列中恢復重復的直線。
4.2 P3P問題求解
退化圓錐曲線中獲得的直線過原二次方程組(7)與(8)的解(交點),因此可以通過求直線與兩個圓錐曲線的交點進行求解。假設第一條直線為:
將(23)代入(5)可得一個關于的二次方程,至多有2個解。需要注意的是,我們只關心正的實數解。得到后,根據(23)可以得到。由可得。代入(3)可得關于的二次方程
由于, 可以得到的解。這種情況下,可以得到的值。由于有一對直線,的解有4種可能。知道后,可以用Gauss-Newton優化(3)的平方和對結果進行細化。之前的工作也使用了類似的細化方法。
求解旋轉和平移:對于每個,首先用(1)消除平移,得到以下方程組
為了找到另一個非共面向量量對應關系,與前人工作一樣,可以使用由三個3D點和圖像點定義的平面的法線(見圖2)。法向量也滿足
其中
結合(25)和(26),可以解得旋轉
得到旋轉后由(1)可以求解平移。
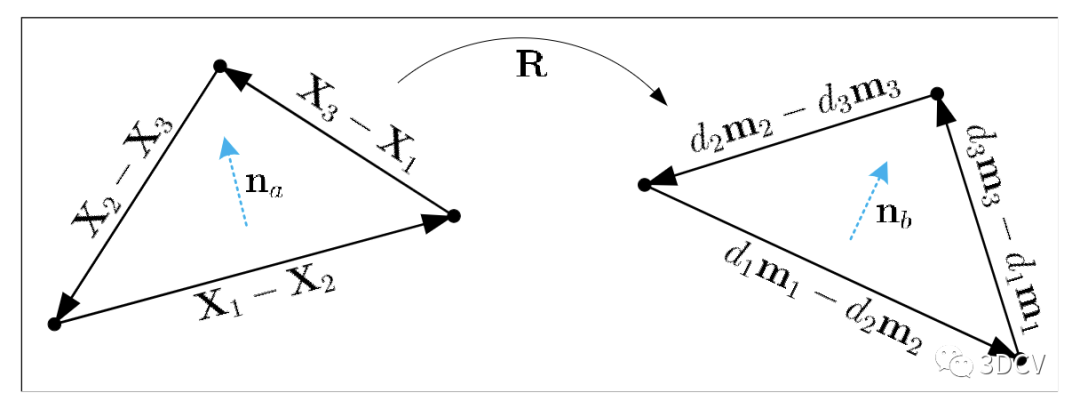
圖2:從向量對應關系到旋轉
4.3 可能解的配置分析以及魯棒算法
以上展示了P3P問題求解的一個通用算法,主要包括2個步驟:
求解構建退化圓錐曲線(式(9));
將退化圓錐曲線分解為兩條直線,進而代入(4)(5)的圓錐曲線求交點
接下來分析解的可能配置,并由此得到魯棒的算法。推薦學習3D視覺工坊近期開設的課程:面向三維視覺算法的C++重要模塊精講:從零基礎入門到進階
(11)中三次方程的通解可能有四種情況:三個實根,一個實根和兩個復根,一個實根和一個重根、一個實三重根。這四種可能性對應于直線和交點的不同情況。在本文的例子中,第一個圓錐曲線(4)是不定的,第二個圓錐曲線(5)是雙曲線(b>0)。不失一般性,假設第一個是橢圓,并在圖3中展示兩個圓錐曲線的可能相對位置。簡要起見,以圖3b作為示例。兩個圓錐曲線有四個實交點,特征三次方程有三個實根,每個實根對應于一對實直線。每對實直線在四個實交點處與兩個圓錐曲線中的任何一個相交(圖3b)。在其他情況下也存在類似的情況。
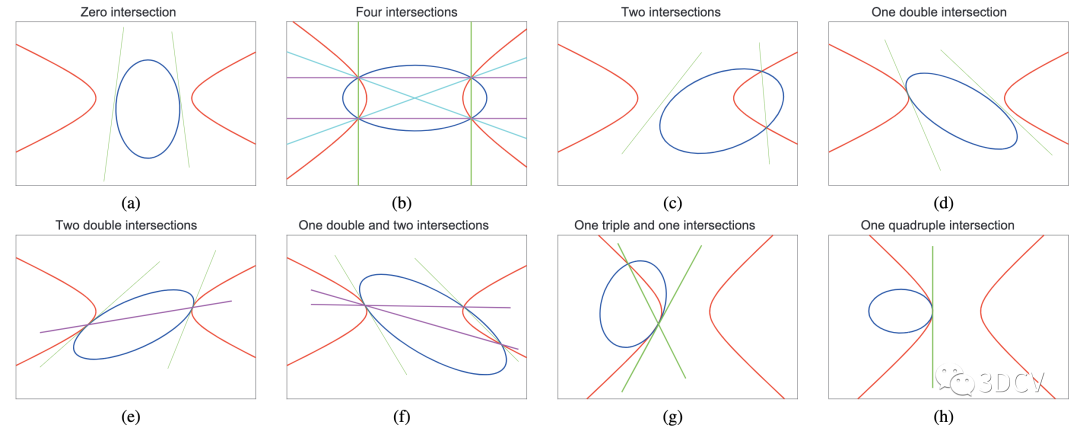
圖3:雙曲線和橢圓相對位置的八種可能情況的圖解。具有不同顏色的一對線對應于不同的三次根。(a)-(c): 兩個圓錐曲線分別具有零、四和兩個實交點的一般情況。(d)-(f): 兩個圓錐曲線相切的臨界情況,分別有一個二重交點、兩個二重交點、一個二重交點和兩個交點。(g)-(h): 兩個圓錐曲線彼此密切(兩個圓錐在切點具有相同的曲率),分別有一個三重交點和一個四重交點
三次方程的根、線的數量和交點之間的關系如表1所示。
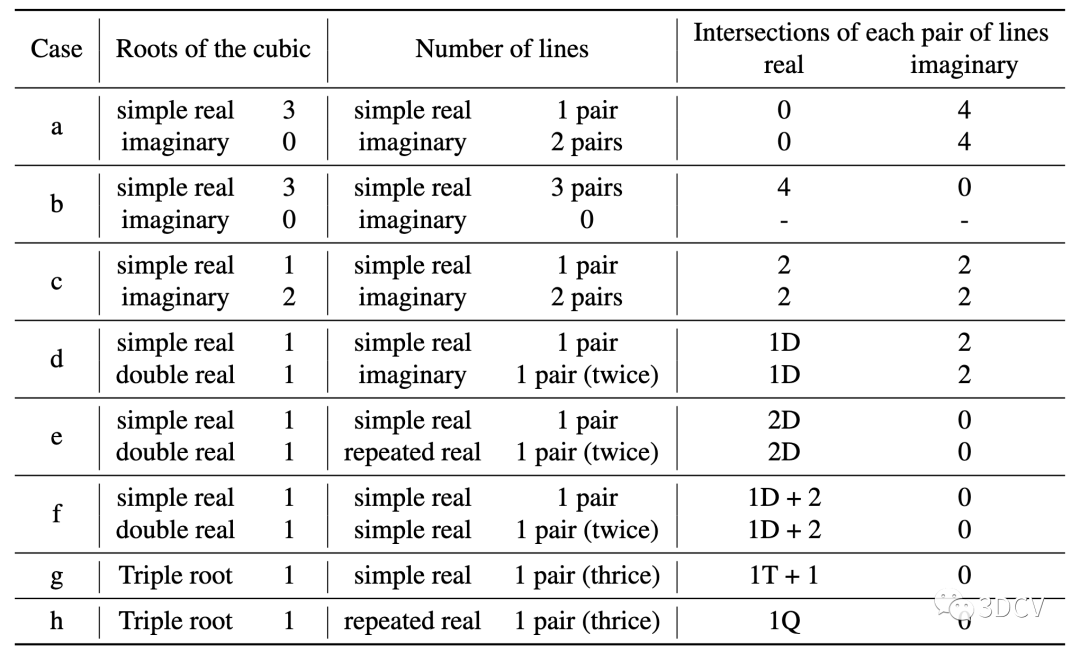
表1:三次方程的根、退化圓錐曲線的直線數和兩個圓錐曲線交點之間的關系。1D、1T和1Q分別表示一個二重交點、一個三重交點和一個四重交點
假設三次方程(11)可以寫成
進行變量替換可得關于的沮喪三次方程(沒有二次項)
其中
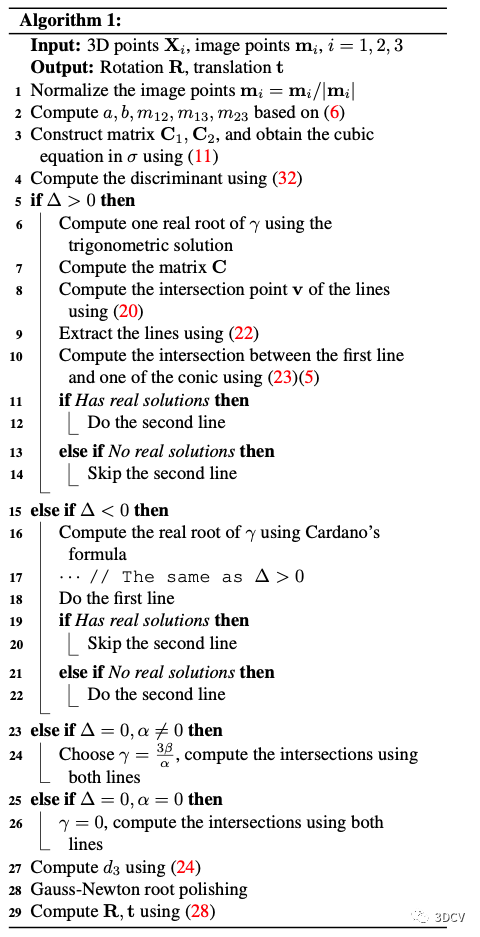
(30)的判別式為:
若,(30)有三個不同的實根,其對應于情況(a)和(b)。對于情況(a),由于所有的實根都不對應于任何實交點,我們可以選擇三個根中的任何一個。使用三角解找到根,該根可以對應于一對實線,也可以不對應于實線。如果選擇的實根給出一對實線,可以在驗證第一條直線沒有實交點后跳過第二條直線。對于情況(b),三個根中的任何一個都將產生一對實線和四個實交點。
若,(30)具有一個實根和兩個共軛復根,這對應于情況(c)。使用Cardano公式可以找到實根,并且可以得到一對實直線。如果其中第一條直線與圓錐曲線有實交點,則可以跳過第二條直線。否則,如果第一條直線沒有實交點,就需要檢查第二條直線。
若且,則(30)有一個單實根和一個重實根,這對應于情況(d)、(e)和(f)。對于情況(d),可以看到重實根在虛直線中產生。因此,對于這種情況,可以使用單實數根。
若且,則。在這種情況下,方程(30)有三重根,這對應于情況(g)和(h)。三次方的實根給出了一對實線,并且可以很容易地找到實交點。
基于以上分析和表1,可以注意到,可以使用任何一對實線來恢復實交點,并且除了情況(d)之外,三次方程的任何實根都對應于一對實直線。只需要在且時避免使用重實根。另一方面,如果,則這對直線和圓錐曲線之間一定有雙重交點。為了避免重復的解,需要檢查直線和圓錐曲線之間的交點。整個過程如算法1所示。推薦學習3D視覺工坊三維點云課程:三維點云處理:算法與實戰匯總
5 實驗
5.1 消融實驗
本文提取直線的幾種方法對比
直接法速度最快,但伴隨矩陣法最穩定。實踐中推薦用伴隨矩陣法。
5.2 與SOTA方法對比
5.2.1 數值穩定性
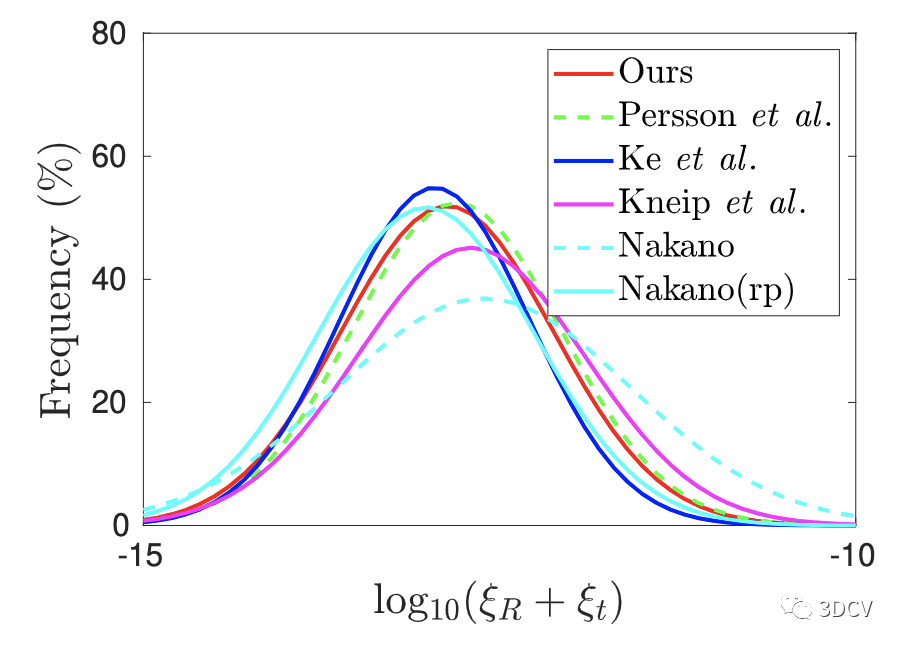
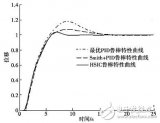
圖4:高斯核平滑直方圖,在無噪聲數據上運行 100,000 次運行的旋轉和平移誤差之和。測量估計和GT之間誤差的 L1 范數。
可以看到所有方法的都是數值穩定的。Nakano(rp)表示帶root polishing(利用Gauss-Newton方法優化根),該方法更多的分布在小誤差范圍。
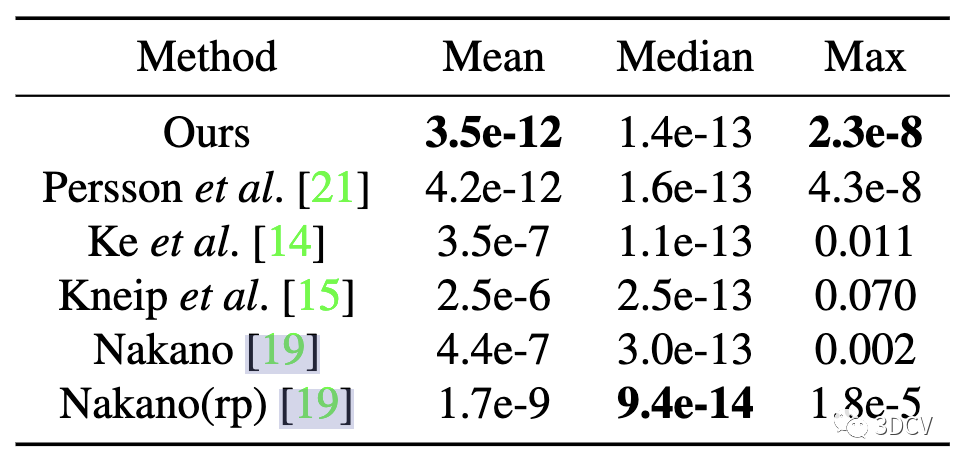
表2:誤差的平均值、中位數和最大值。粗體表示最好的結果
本文提出的求解器在均值誤差和最大誤差上的性能最好,而Nakano(rp)求解器在中值誤差上的性能最好。請注意,基于四次的求解器包含的失敗案例,在此實驗中是刪除了的。
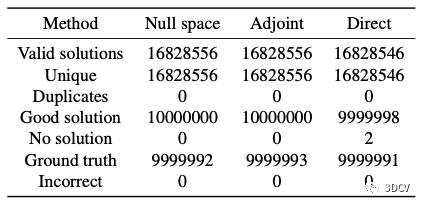
5.2.2 解的對比
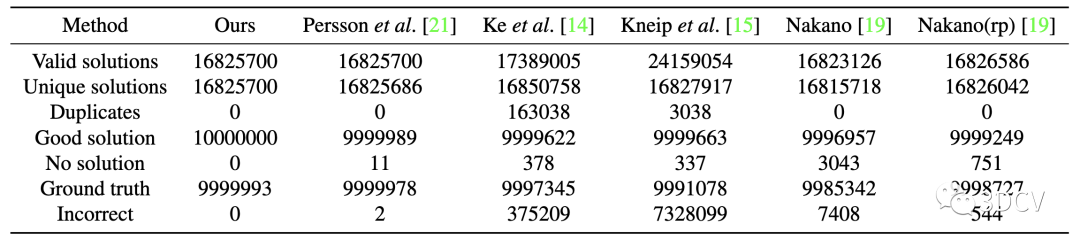
表3:與SOTA求解器對比
本文的求解器優于現有的方法。對于幾乎所有的試驗,都能找到好的解和GT,沒有重復或錯誤的解。基于四次方程的Ke等人和Kneip等人的方法有很多重復解和錯誤解。因為他們用了四次方程的所有4個根(忽略虛部)來找到可能的估計,提高找到GT的可能性是可以的,但會損失其效率,因為實踐中每個假設需要用RANSAC進行評估。Nakano求解器用的虛部閾值過濾不必要的復根,但結果沒有本文的方法好。Ke等人與Kneip等人的方法也能夠用類似的閾值過濾四次方程的根,從而減少重復和錯誤解。
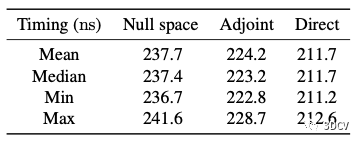
5.2.3 運行時間對比

表4:平均運行時間對比,次嘗試,每個嘗試100次
基于三次方程的求解器比基于四次方程的要更高效,所提出的求解器比SOTA方法快15.4%,加速主要原因有兩個:
基于相對位置和判別式的分析,可以快速選擇三次方程的穩定根,根據判別式的符號可以避免沒必要的計算。
從退化圓錐曲線中恢復直線的方法比Persson等人的方法更高效。本文用C++復現的Nakano方法比原始的MATLAB實現慢,可能是用了不同的矩陣計算庫導致的。
5.3 失敗案例分析
Persson等人的方法在沒有解的情況下,其判別式非常接近于0。這是因為判別式為0對應于圖3中的(d)-(h)這些臨界情況,由于浮點數的舍入誤差和數值不穩定性,這些情況下很難恢復運動參數。本文發現大多數失敗案例是(d)和(f)的情形,(e)(g)(h)很少發生。
與危險圓柱的關系
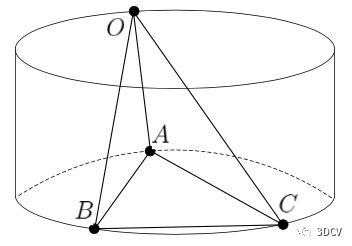
圖5:危險圓柱是指三個3D點A,B,C為圓形環繞點的圓柱,其軸垂直于ABC平面
之前有工作指出,如果光心位于危險圓柱的表面,則P3P問題的解不穩定。本文發現危險圓柱會導致判別式,即對應于圖3中的臨界情形。
5 總結
本文重新審視了 P3P 問題,特別是研究了基于兩個圓錐曲線相交的解法,類似于 Persson 和 Nordberg的方法。通過分析可能的解的集合并明確枚舉極端情況,能夠設計一個快速穩定的 P3P 算法。實驗表明,與以前的方法相比,本文的求解器更魯棒且更快。
局限性
本文的方法基于研究兩個圓錐曲線的實交點。然而,P3P 問題是特殊的,因為解應該是正實數。三次方程可能有更多的約束,不幸的是,本文沒有發現一個很好的方法來做到這一點。請注意,式(4) 和 (5) 可以用同倫延拓來求解,該方法擅長解決大規模平方系統。但對于 P3P 問題,本文發現它不如當前基本上閉式的求解器有效。
-
相機
+關注
關注
4文章
1347瀏覽量
53522 -
P3P
+關注
關注
0文章
2瀏覽量
6623 -
求解器
+關注
關注
0文章
77瀏覽量
4516
原文標題:CVPR2023 | 如何設計一個更快更魯棒的P3P求解器?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
帶有無窮分布時滯的不確定系統的魯棒H_∞濾波器設計
魯棒模型預測控制(RMPC)是什么
偏航角對P3P位姿測量魯棒性的影響分析
基于魯棒性組密鑰協商方案設計
Linux的魯棒性度量詳解及魯棒性關聯測試分析

基于KeyStone器件特性的魯棒性系統設計及例程解析
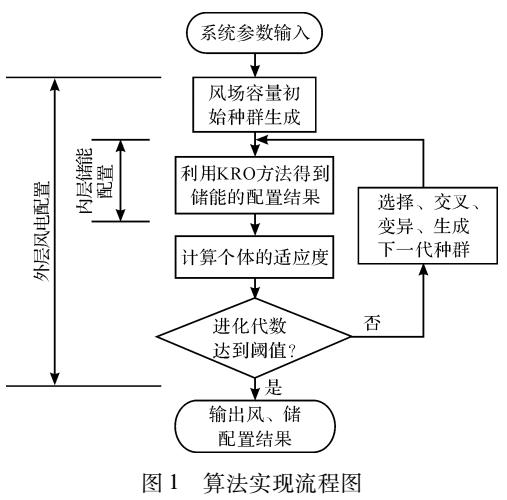
魯棒優化的風儲聯合配置





 工商網監
工商網監
評論