 深入淺出擴散模型(Diffusion Model)系列:基石DDPM
深入淺出擴散模型(Diffusion Model)系列:基石DDPM
大家好,在【深入淺出擴散模型系列】中,我們將從原理到源碼,從基石DDPM到DALLE2,Imagen與Stable Diffusion,通過詳細的圖例和解說,和大家一起來了解擴散模型的奧秘。同時,也會穿插對經典的GAN,VAE等模型的解讀,敬請期待~
本篇將和大家一起解讀擴散模型的基石:DDPM(Denoising Diffusion Probalistic Models)。擴散模型的研究并不始于DDPM,但DDPM的成功對擴散模型的發展起到至關重要的作用。在這個系列里我們也會看到,后續一連串效果驚艷的模型,都是在DDPM的框架上迭代改進而來。所以,我把DDPM放在這個系列的第一篇進行講解。
初讀DDPM論文的朋友,可能有以下兩個痛點:
論文花極大篇幅講數學推導,可是我看不懂。
論文沒有給出模型架構圖和詳細的訓練解說,而這是我最關心的部分。
針對這些痛點,DDPM系列將會出如下三篇文章:
DDPM(模型架構篇):在閱讀源碼的基礎上,本篇繪制了詳細的DDPM模型架構圖(DDPM UNet),同時附上關于模型運作流程的詳細解說。本篇不涉及數學知識,直觀幫助大家了解DDPM怎么用,為什么好用。
DDPM(人人都能看懂的數學推理篇):也就是本篇文章,DDPM的數學推理可能是很多讀者頭疼的部分。我嘗試跳出原始論文的推導順序和思路,從更符合大家思維模式的角度入手,把整個推理流程串成一條完整的邏輯線。同樣,我也會配上大量的圖例,方便大家理解數學公式。如果你不擅長數學推導,這篇文章可以幫助你從直覺上了解DDPM的數學有效性;如果你更關注推導細節,這篇文章中也有詳細的推導中間步驟。
DDPM(源碼解讀篇):在前兩篇的基礎上,我們將配合模型架構圖,一起閱讀DDPM源碼,并實操跑一次,觀測訓練過程里的中間結果。
【如果你粗掃一眼本文,看見大段的公式推導,請不要放棄。出于嚴謹的目的,本文必須列出公式推導的細節;但是,如果你只想把握整體邏輯,完全可以跳過推導,只看結論和圖解,這并不會影響本文的閱讀。最后,看在這滿滿的手打公式和圖片解讀上,如果大家覺得本文有幫助,請多多點贊和在看!】
全文目錄如下:
一、DDPM在做一件什么事
在DDPM模型架構篇中,我們已經討論過DDPM的作用,以及它為何能成為擴散模型/文生圖模型基石的原因。這里為了方便讀者更好了解上下文,我們將相關講解再放一次。
假設你想做一個以文生圖的模型,你的目的是給一段文字,再隨便給一張圖(比如一張噪聲),這個模型能幫你產出符合文字描述的逼真圖片,例如:
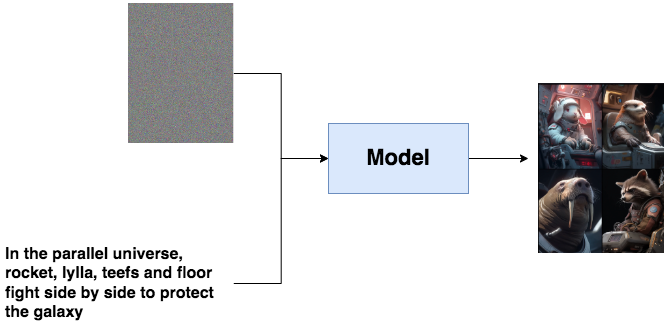
文字描述就像是一個指引(guidance),幫助模型去產生更符合語義信息的圖片。但是,畢竟語義學習是復雜的。我們能不能先退一步,先讓模型擁有產生逼真圖片的能力?
比如說,你給模型喂一堆cyberpunk風格的圖片,讓模型學會cyberpunk風格的分布信息,然后喂給模型一個隨機噪音,就能讓模型產生一張逼真的cyberpunk照片。或者給模型喂一堆人臉圖片,讓模型產生一張逼真的人臉。同樣,我們也能選擇給訓練好的模型喂帶點信息的圖片,比如一張夾雜噪音的人臉,讓模型幫我們去噪。
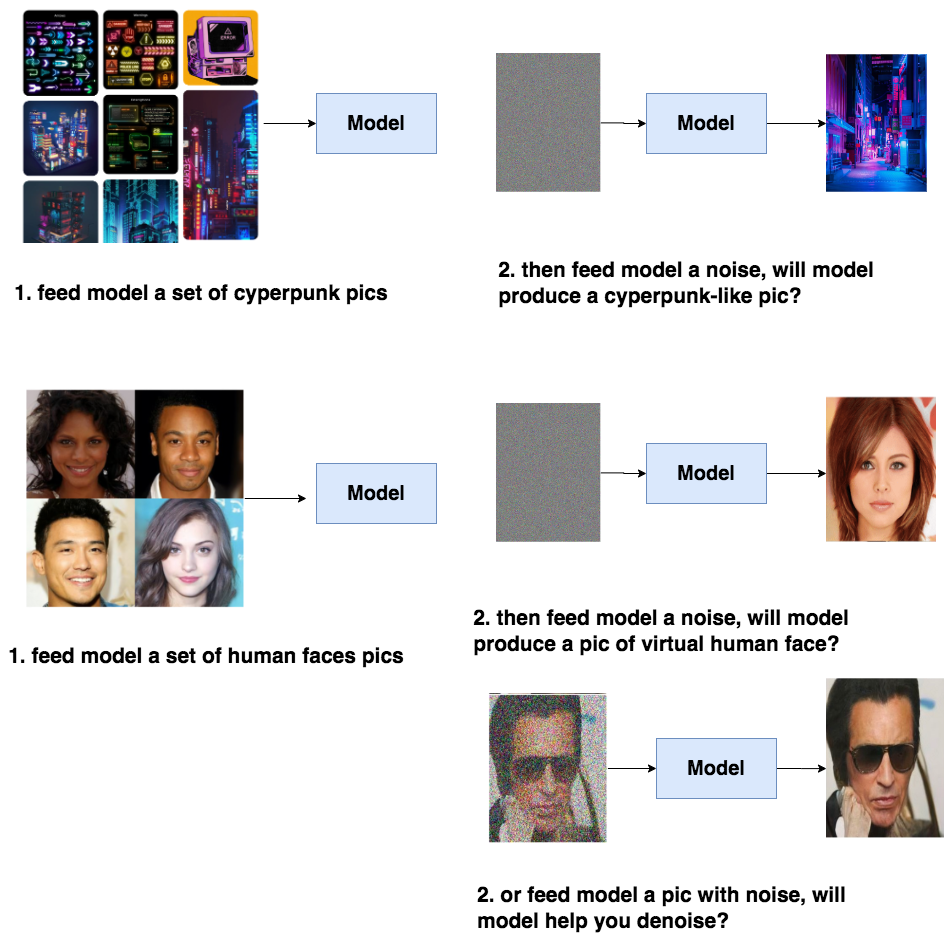
具備了產出逼真圖片的能力,模型才可能在下一步中去學習語義信息(guidance),進一步產生符合人類意圖的圖片。而DDPM的本質作用,就是學習訓練數據的分布,產出盡可能符合訓練數據分布的真實圖片。所以,它也成為后續文生圖類擴散模型框架的基石。
二、優化目標
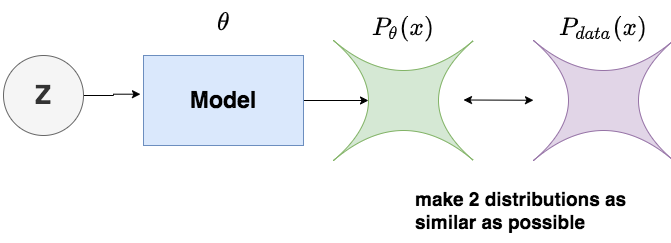
現在,我們知道DDPM的目標就是:使得生成的圖片盡可能符合訓練數據分布。基于這個目標,我們記:
:模型所產生的圖片的(概率)分布。其中表示模型參數,以作為下標的目的是表示這個分布是由模型決定的,
:訓練數據(也可理解為真實世界)圖片的(概率)分布。下標data表示這是一個自然世界客觀存在的分布,與模型無關。
則我們的優化目標可以用圖例表示為:
而求兩個分布之間的相似性,我們自然而然想到了KL散度。復習一下KL散度的定義——分布p與分布q之間的KL散度為:
則現在我們的目標函數就變為:我們利用利用式(1.1),對該目標函數做一些變換
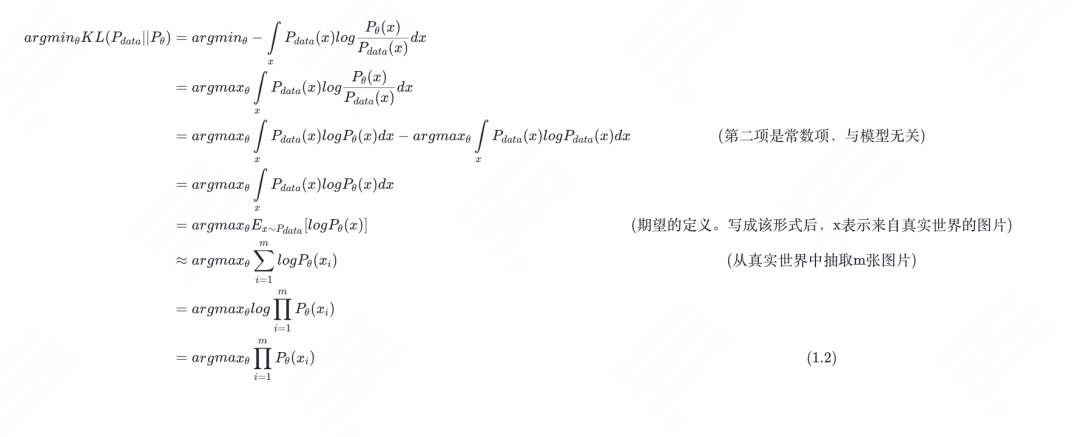
經過這一番轉換,我們的優化目標從直覺上的“令模型輸出的分布逼近真實圖片分布”轉變為"",我們也可以把這個新的目標函數通俗理解成“使得模型產生真實圖片的概率最大”。如果一上來就直接把式(1.2)作為優化目標,可能會令很多朋友感到困惑。因此在這一步中,我們解釋了為什么要用式(1.2)作為優化目標。
接下來,我們近一步來看,對式(1.2)還能做什么樣的轉換和拆解。
三、最大化ELBO(Evidence Lower Bound)
的本質就是要使得連乘中的每一項最大,也等同于使得最大。所以我們進一步來拆解。在開始拆解之前,讓我們先回顧一下擴散模型的加噪與去噪過程,幫助我們更好地做數學推理。
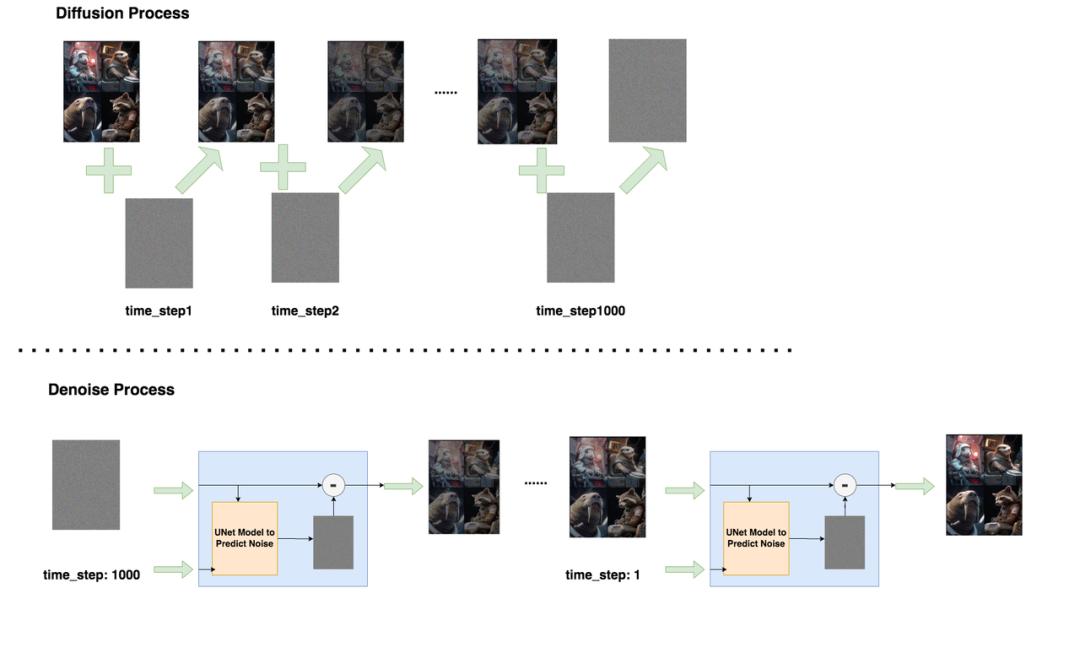
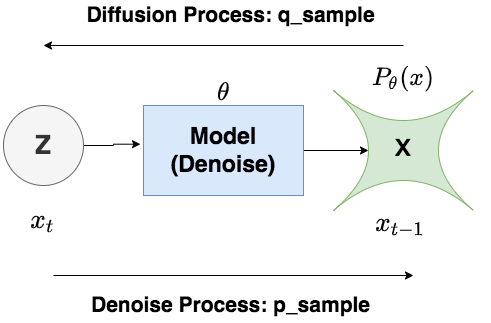
在Diffusion Process中,我們不過模型,而是按照設置好的加噪規則,隨著time_step的變化,給圖片添加噪聲()。在Denoise Process中,我們則需要經過模型,對圖片進行去噪,逐步將圖片還原成原始的樣子()。Diffusion過程中遵循的分布,我們記為,Denoise過程中遵循的分布,我們記為。嚴格來說,Diffusion過程遵循的分布應該記為,下標也表示模型參數,也就是說,“規則”也算一種“模型”。理論上,你想對Diffusion單獨訓練一套模型,也是沒有問題的。為了表述嚴謹,我們接下來都將用進行表示。
現在我們可以回到拆解了,即然x和z與Diffusion和Denoise的過程密切相關,那么我們的目標就是要把拆解成用同時表達的形式:
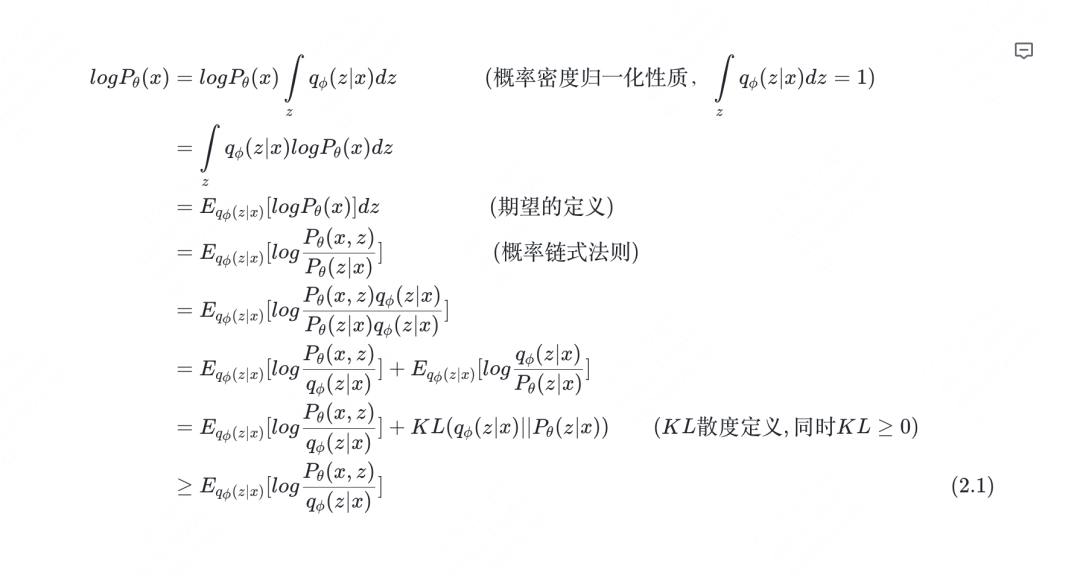
就被稱為Evidence Lower Bound(ELBO)。到這一步為止,我們將最大化拆解成最大化ELBO,其中與diffusion過程密切相關,與denoise過程密切相關。
(2.1)這個公式一出,大家是不是很眼熟?沒錯,它其實也刻畫了VAE的優化目標,所以這里我們才選用z而不是x來表示latent space中的變量。有些讀者可能已經發現了,(2.1)描述的是一個time_step下的優化目標,但是我們的擴散模型,是有T個time_step的,因此,我們還需要把(2.1)再進一步擴展成鏈式表達的方式。在這一步擴展里,我們將不再使用z變量,取而代之的是用來表示,更符合我們對擴散模型的整體理解,則我們有:

其中,表示從真實世界中篩選出來的干凈的圖片,表示最后一個time_step加噪后的圖片,通常是一個近似純噪聲。細心的讀者可能發現,在(2.2)公式中,左邊的是不是寫成更合理呀?沒錯,因為擴散模型的目標就是去還原來自真實世界的。但這里為了前后表達統一,就不做修改了。讀者們只要理解(2.2)的含義即可。
四、進一步拆解ELBO
復習一下,到這一步為止,我們經歷了如下過程:
首先,總體優化目標是讓模型產生的圖片分布和真實圖片分布盡量相似,也就是
對KL散度做拆解,將優化目標轉變為,同時也等價于讓連乘項中的每一項最大
對做拆解,以優化DDPM其中一個time_step為例,將優化目標轉向最大化下界(ELBO)
以全部time_step為例,將優化目標轉變為,也就是式(2.2)
恭喜你充滿耐心地看到這一步了!接下來,我們還需要再耐心對式(2.2)進行拆解,畢竟現在它只是一個偏抽象的形式,因此我們還需對p與q再做具象化處理。之前我們提過,下標的意思是強調從理論上來說,diffusion過程可以通過訓練一個模型來加噪,而并非只能通過規則加噪。這兩種方法在數學上都是成立的。由于DDPM采用了后者,因此在接下來的過程中,我們將會去掉下標。
式(2.2)的進一步拆解如下:
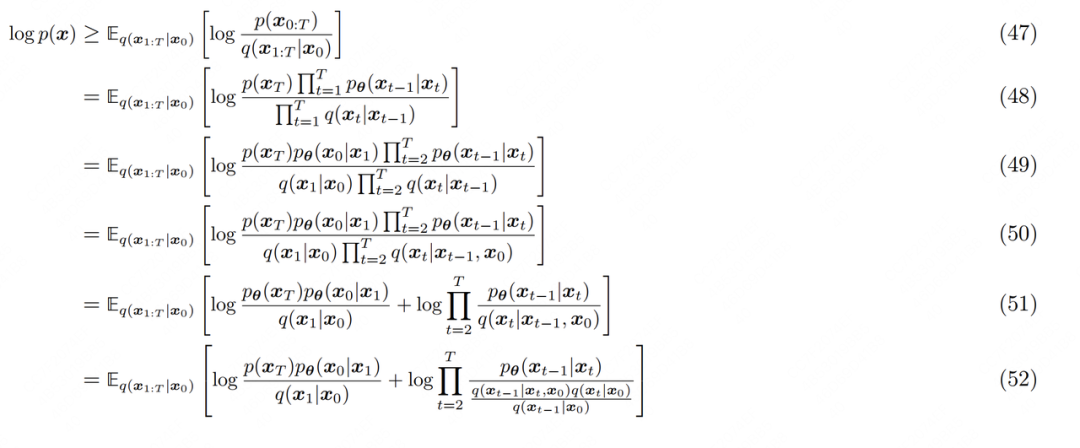
(48):分子上,因為已是個近似高斯分布的純噪聲,因此它的分布p是已知的,和模型無關,所以將單獨提煉出。分子與分母的其余項則是因為擴散模型遵循馬爾可夫鏈性質,因此可以通過鏈式連乘規則進行改寫
(50):表示來自真實世界的干凈圖片,它是diffusion過程的起源,任意都可由推導而來,因此可將改寫成
(52):根據多變量條件概率的貝葉斯鏈式法則進行改寫,即:
當然多變量條件概率的改寫方式有很多種,根據需要我們選擇了上面的這一種
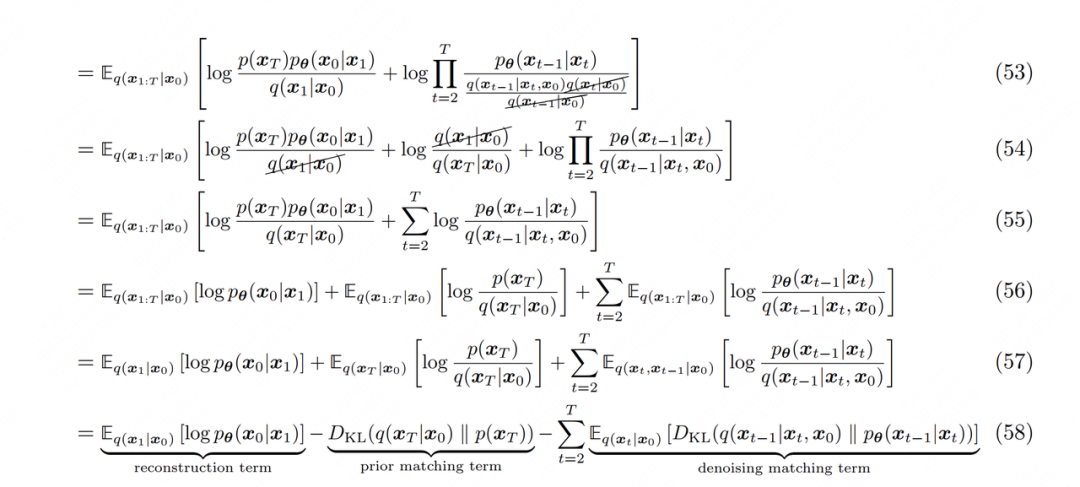
(54):由于q是既定的,可以看作是一個常量,因此可增加一項
(56)~(57):根據期望項中涉及到的具體元素,調整期望E的下標
(58):根據KL散度的定義重寫最后兩項。其中prior matching term可看作是常量,reconstruction term和denoising matching term則是和模型密切相關的兩項。由于兩者間十分相似,因此接下來我們只需要特別關注denoising matching term如何拆解即可。
五、重參數與噪聲預測
現在,我們的優化目標轉為最大化,我們繼續對該項進行拆解。
首先我們來看一項。
根據多變量條件概率的鏈式法則,我們有:
現在,我們分別來看,,具體長什么樣子。
5.1 重參數
5.1.1 為什么需要重參數
回顧模型架構篇,我們曾經提過,最樸素的diffusion加噪規則是,在每一個time_step中都sample一次隨機噪聲,使得:
在架構篇中,我們直接指出,即篩選的噪聲是來自一個標準高斯分布。但是為什么要這么設計呢?
我們假設真實世界的圖片服從這樣的高斯分布,而現在我們的模型就是要去學習這個分布,更具象點,假設模型遵從的分布是,我們的目的就是讓逼近,逼近。
那么在diffusion過程中,更符合直覺的做法是,模型從采樣出一個噪聲,然后在denoise的過程中去預測這個噪聲,這樣就能把梯度傳遞到上,使得模型在預測噪聲的過程中習得真實圖片的分布。
但這樣做產生的問題是,實際上梯度并不能傳遞到上。舉個簡單的例子,假設你從隨機采樣出了一個3,你怎么將這個隨機的采樣結果和聯系起來呢?也就是說,在diffusion過程中,如果我們從一個帶參數的分布中做數據采樣,在denoise過程中,我們無法將梯度傳遞到這個參數上。
針對這個問題,有一個簡單的解決辦法:我從一個確定的分布(不帶參數)中做數據采樣,不就行了嗎?比如,我從先采樣出一個,然后再令最終的采樣結果z為:。這樣我不就能知道z和間的關系了?同時根據高斯分布性質,z也服從分布。
以上“從一個帶參數的分布中進行采樣”轉變到“從一個確定的分布中進行采樣”,以解決梯度無法傳遞問題的方法,就被稱為“重參數”(reparamterization)。關于重參數原理的更多細節,推薦大家閱讀這篇文章(https://spaces.ac.cn/archives/6705)
5.1.2 重參數的具體方法
到這一步根據重參數的思想,我們可以把轉變為了。但是現在的diffusion過程還是太繁瑣:每一個time_step都要做一次采樣,等我后續做denoise過程去預測噪聲,傳播梯度的時候,參數不僅在這個time_step有,在之前的一系列time_steps中都有,這不是給我計算梯度造成困擾了嗎?注意到在diffusion過程中,隨著time_step的增加,圖片中含有的噪聲是越來越多的,那我能不能設定一個函數,使得每個time_step的圖片都能由原始圖片加噪推導而來,然后使得噪聲的比例隨著time_step增加而變大?這樣我不就只需要一次采樣了嗎?
當然沒有問題,DDPM采用的做法是:
(1)首先,設置超參數,滿足隨著t增大,逐漸變大。
(2)令:
易推出隨著t增大而逐漸變小
(3)則任意時刻的都可以由表示出:
我們通過圖例來更好理解上面的三步驟:
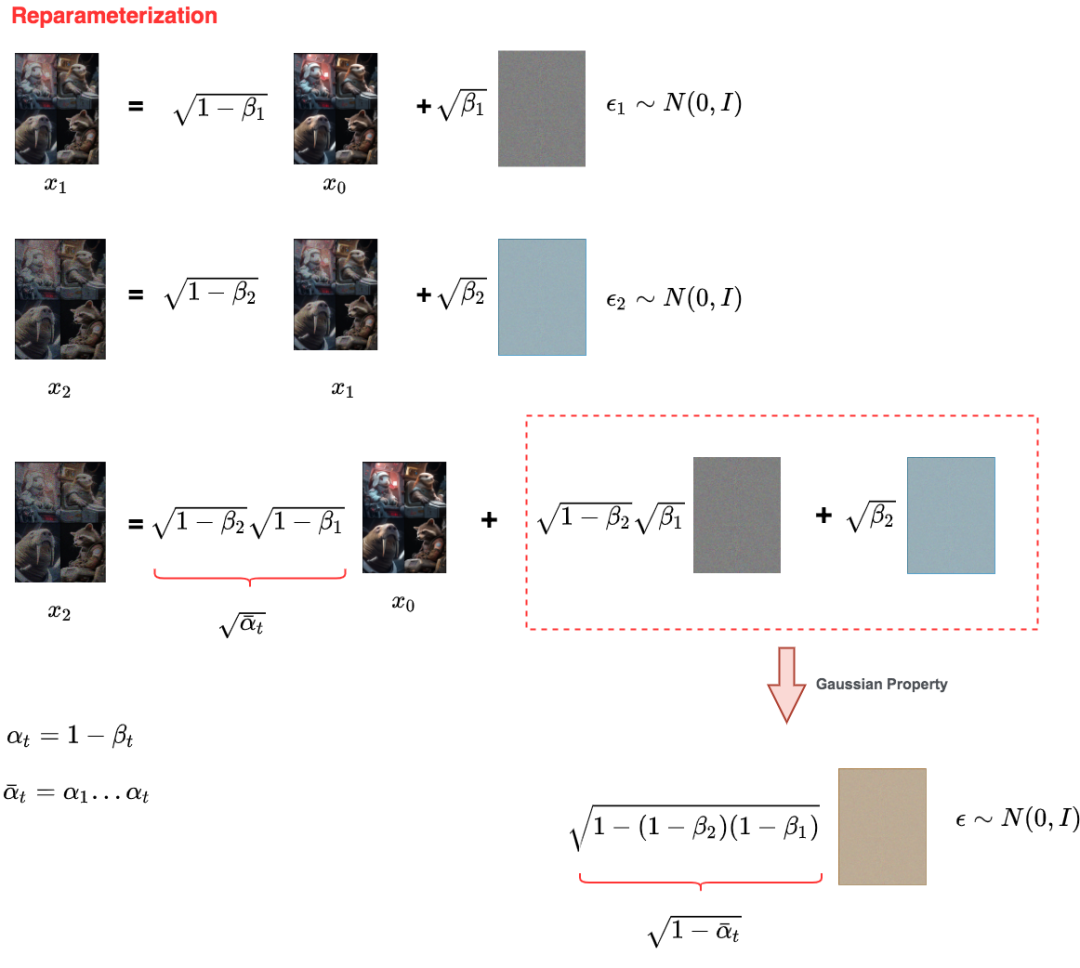
詳細的過程都在圖例中表示出了,這里不做贅述。
5.2 噪聲預測
講完了重參數的部分,我們繼續回到剛才拆解的步驟上來,復習一下,我們已經將ELBO拆解成,現在我們的關注點在q分布上,而q分布又由以下三項組成:
,我們繼續來看這三項要怎么具體表示出來。
由章節5.1.2,我們知道:
則任意的關系都可以由此推出:
(友情提示:大家記得看5.1.2中的圖例區分哦,不是typo)。
同時,我們已經知道(假設)都服從高斯分布,則根據高斯分布的性質,我們有:
對于高斯分布,知道了均值和方差,我們就可以把它具體的概率密度函數寫出來:
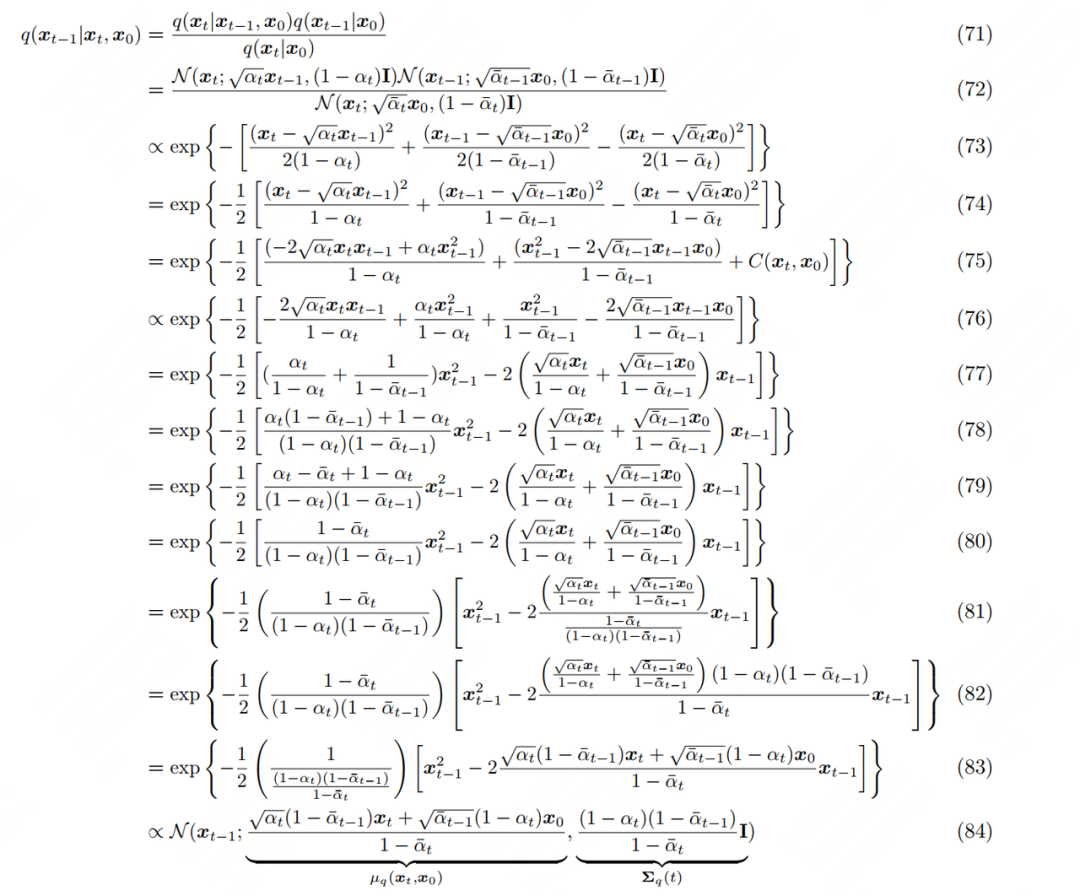
經過這樣的一頓爆肝推導,我們終于將的分布寫出來了(84)。也就是我們當前優化目標中的q部分。
現在,我們來看部分,根據優化目標,此時我們需要讓p和q的分布盡量接近:
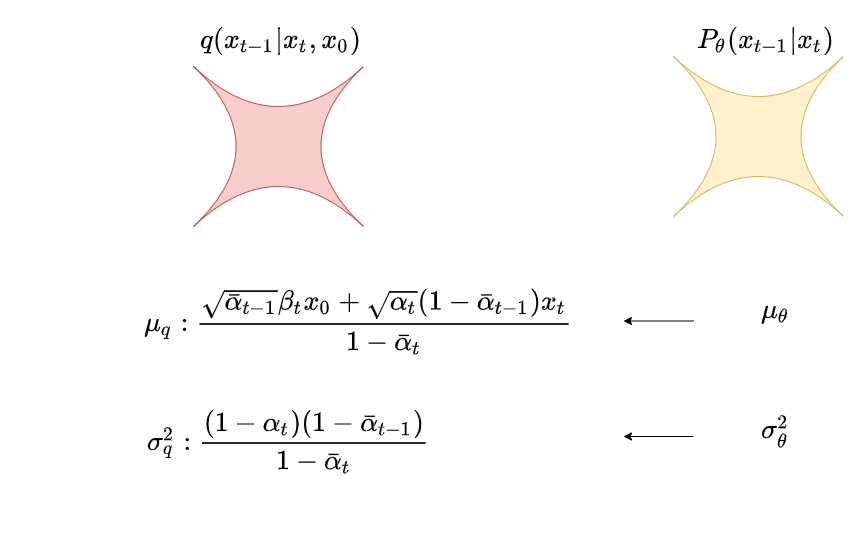
而讓p和q的分布接近,等價與讓。注意到其實是一個常量,它只和超參有關。在DDPM中,為了簡化優化過程,并且使訓練更穩定,就假設也按此種方式固定下來了。在后續的擴散模型(例如GLIDE)中,則引入對方差的預測。在DDPM中,只預測均值。
好,那么預測均值,到底是在預測什么東西呢?我們對再做改寫,主要是根據我們設置的diffusion規則,將用進行表示:
觀察到,式(5.1)的結果在diffusion過程中就已決定好。所以現在對于,我只要讓它在denoise的過程里,預測出,使得,然后令:
這樣,我不就能使得和的分布一致了嗎!
此刻!是不是一道光在你的腦海里閃過!一切都串起來了,也就是說,只要在denoise的過程中,讓模型去預測噪聲,就可以達到讓“模型產生圖片的分布”和“真實世界的圖片分布”逼近的目的!
5.3 再次理解training和sampling
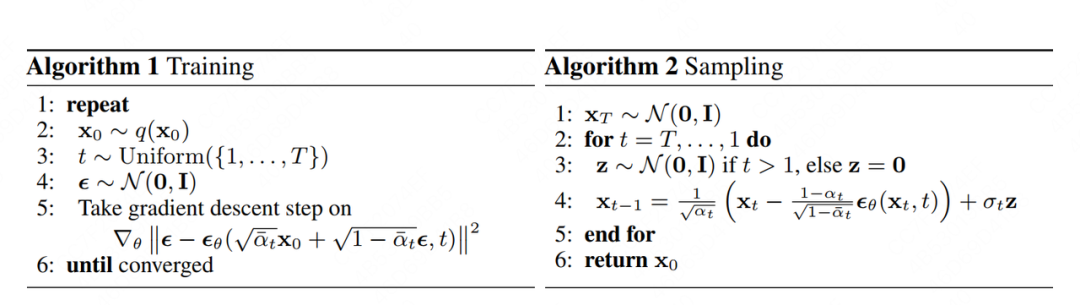
現在,我們再來回顧training和sampling的過程,在training的過程中,我們只需要去預測噪聲,就能在數學上使得模型學到的分布和真實的圖片分布不斷逼近。而當我們使用模型做sampling,即去測試模型能生成什么質量的圖片時,我們即可由式(5.1)中的推導結論,從推導,直至還原出。注意到這里,其中是我們式(5.1)中要逼近的均值真值;,則正是我們已經固定住的方差。
關于training和sampling更詳細的實操解說,可以參見模型架構篇。
六、總結(必看)
恭喜你堅持看到了這里!我們來把整個推導串成完整的邏輯鏈:
(1)首先,DDPM總體優化目標是讓模型產生的圖片分布和真實圖片分布盡量相似,也就是。同時,我們假設真實世界的圖片符合高斯分布:。因此我們的目標就是要讓習得
(2)但是這兩個客觀存在的真值是未知的,因此我們必須對KL散度進行不斷拆解,直至能用確定的形式將它表示出來。
(3)對KL散度做初步拆解,將優化目標轉變為,同時也等價于讓連乘項中的每一項最大
(4)繼續對做拆解,以優化DDPM其中一個time_step為例,將優化目標轉向最大化下界(ELBO)
(5)依照馬爾可夫性質,從1個time_step推至所有的time_steps,將(4)中的優化目標改寫為,也就是式(2.2)
(6)對式(2.2)繼續做拆解,將優化目標變為
(7)先來看(6)中的一項,注意到這和diffusion的過程密切相關。在diffusion的過程中,通過重參數的方法進行加噪,再經過一頓爆肝推導,得出,易看出該分布中方差是只和我們設置的超參數相關的常量。
(8)再來看(6)中的一項,下標說明了該項和模型相關。為了讓p和q的分布接近,我們需要讓p去學習q的均值和方差。由于方差是一個常量,在DDPM中,假設它是固定的,不再單獨去學習它(后續的擴散模型,例如GLIDE則同時對方差也做了預測)。因此現在只需要學習q的均值。經過一頓變式,可以把q的均值改寫成。因此,這里只要讓模型去預測噪聲,使得,就能達到達到(1)中的目的!
七、參考
在學習DDPM的過程中,我也看了很多參考資料,但發現很難將整個推導過程串成一條符合思維慣性的邏輯鏈,因此對很多細節也是一知半解。直到我看到李宏毅老師對擴散模型原理的講解(從分布相似性入手),以及閱讀了google的一篇關于擴散模型數學推理的綜述,才恍然大悟。自己動手推導后,從更符合我慣性思維的角度入手,寫了這篇文章。因此,我也把我認為非常有幫助的參考資料列在下面,大家可以補充閱讀。
-
源碼
+關注
關注
8文章
633瀏覽量
29147 -
函數
+關注
關注
3文章
4308瀏覽量
62445 -
模型
+關注
關注
1文章
3178瀏覽量
48730
原文標題:深入淺出擴散模型(Diffusion Model)系列:基石DDPM(人人都能看懂的數學原理篇)
文章出處:【微信號:GiantPandaCV,微信公眾號:GiantPandaCV】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論