 CAN和RS-485,哪個更適合你?
CAN和RS-485,哪個更適合你?
CAN通信和RS-485通信都是工業自動化領域常用的兩種通信方式。但應用場景的不同,通信方式的選擇也會不同。故選擇合適的通信方式,是決定一款產品是否得到市場認可的關鍵因素之一。
 ?CAN通信
?CAN通信
CAN協議經過ISO標準化后,根據傳輸速度的不同分成兩類:ISO11898-2(高速)和ISO11898-3(低速)。CAN通信實現需要CAN控制器和CAN收發器。目前市場有兩種主流的方案:
- 將MCU和CAN控制器集成在一起,外接CAN收發器;
- CAN控制器和CAN收發器都采用外接的形式,其工作框圖如圖1、圖2所示。
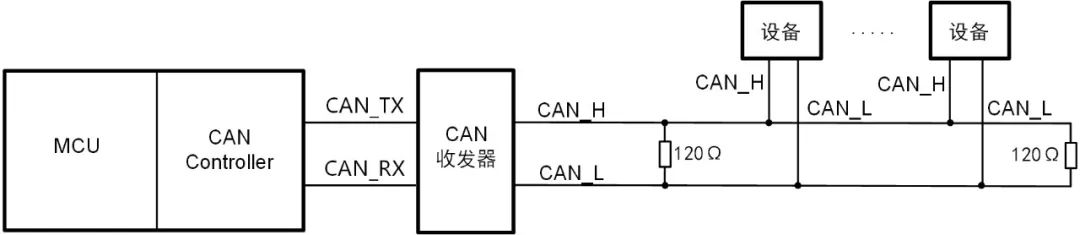
圖1 CAN控制器和MCU集成在一起
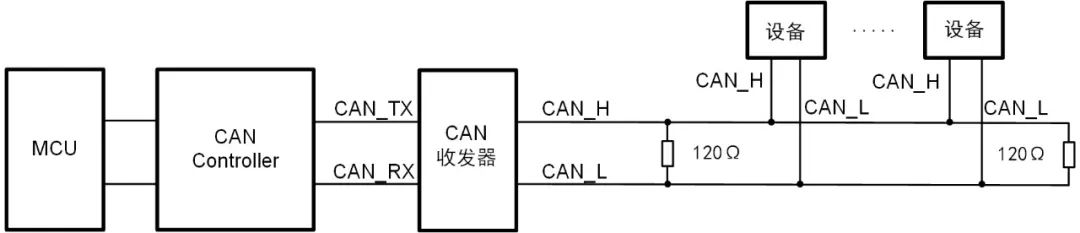
圖2 CAN控制器和收發器都采用外接方式
CAN數據傳輸是通過兩根線之間的電壓差實現的(差分傳輸),這兩根線分別為CANH和CANL。根據標準定義,CANH=CANL=2.5V(CANH-CANL=0V)為隱形電平,“邏輯1”;CANH=3.5V,CANL=1.5V(CANH- CANL=2V)為顯性電平,“邏輯0”,如圖3所示。(顯性電平的優先級高于隱性電平,具體表現在多主機仲裁CAN總線)
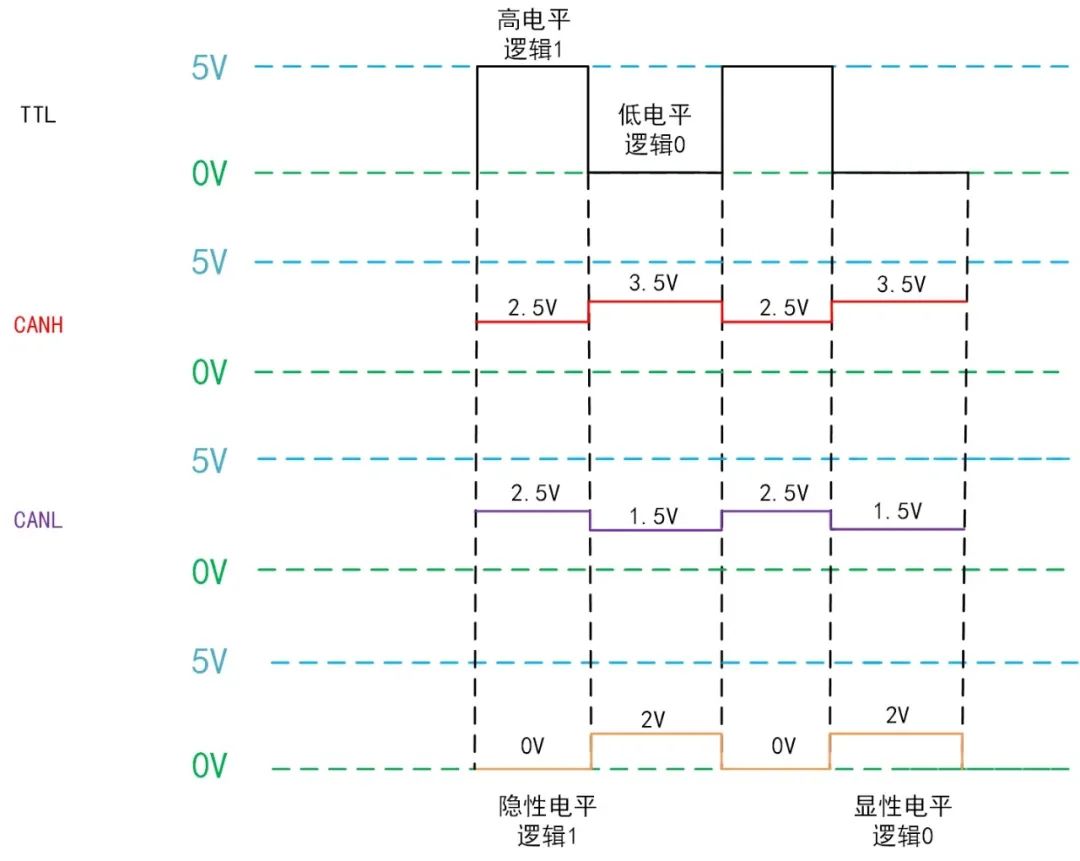 圖3CAN電平標準定義
圖3CAN電平標準定義
 ?RS-485通信
?RS-485通信
圖4RS-485工作框圖
RS-485通信實現需要用到485收發器,具體工作框圖如圖4所示。RS-485數據傳輸是通過兩根線之間的電壓差實現的(差分傳輸),這兩根線分別為485A和485B。根據標準定義:
RS-485作驅動器時,V485A-V485B=+(2~6)V,為高電平,邏輯為1;V485A-V485B=-(2~6)V,為低電平,邏輯為0;
RS-485作接收器時,V485A-V485B≥+200mV,為高電平,邏輯為1;V485A-V485B≤-200mV,為低電平,邏輯為0。
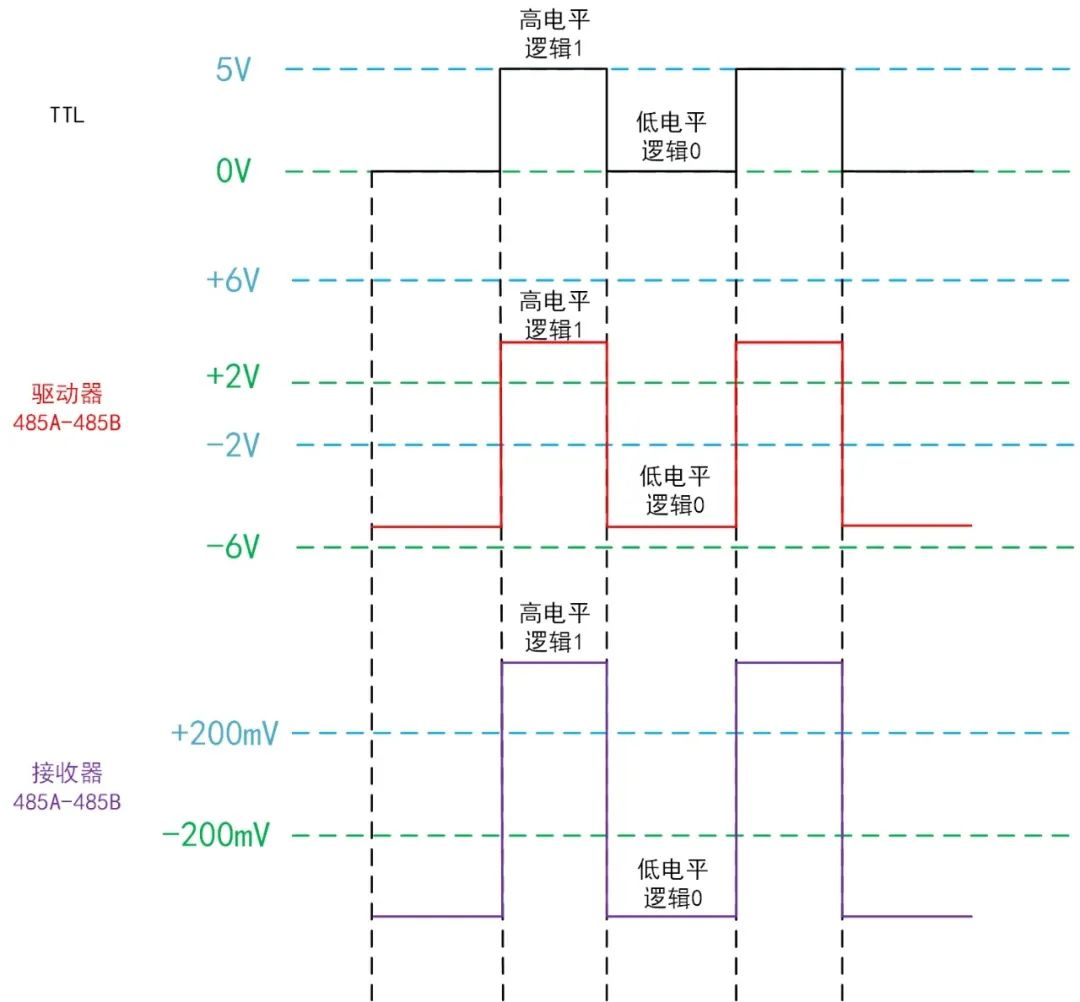
圖5RS-485電平標準定義
收發器的輸入阻抗、單位負載和節點數存在密切關系,具體如表1所示。RS-485總線還需要增加上下拉電阻(485A接上拉電阻,485B接下拉電阻),其目的:
- 避免485A和485B差分電壓處于-200mV~+200mV范圍(總線處于不確定狀態);
- 避免總線輸出低電平(UART協議起始位為低電平,導致通信異常);
- 避免總線受到電磁干擾問題。
表1 接收器輸入阻抗、單位負載和節點數的關系
單位負載 | 節點數(個) | 接收器輸入阻抗(kΩ) |
1 | 32 | 12 |
1/2 | 64 | 24 |
1/4 | 128 | 48 |
1/8 | 256 | 96 |
?行業應用
CAN屬于串行通信協議,具有高可靠性、高實時性和高靈活度的特性。支持高安全等級的分布式實時控制場合,主要應用于高速數據傳輸和實時控制系統。例如CAN在智慧工廠應用如圖6所示,將USBCAN-4E-U通訊盒與PC監控機連接,進而將PC監控機接入工廠的CAN總線中。每條生產線中的每個工作站通過CAN總線將監測數據反饋至PC監控機,便于監控人員對每條生產線中的每個工作站實時監控,有效防止生產事故的發生。若一條生產線中的相鄰工作站距離較遠(距離>200m),推薦在CAN總線中增加 CANFDBridge ,保證足夠的通訊距離和實現網絡繼擴容的功能。
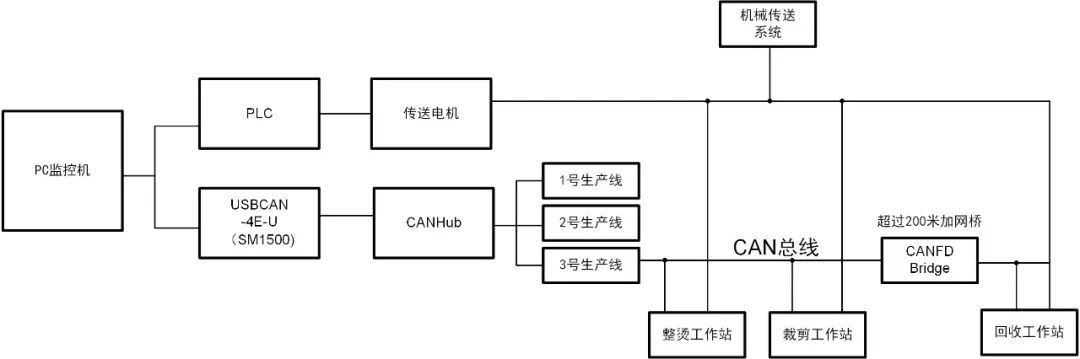
圖6CAN總線在智慧工廠的應用實例
我司推出全隔離CAN收發芯片SM1500,采用DFN封裝,其體積僅為12.45mm*9.85mm*3.00mm,可以在-40°~+125°環境下正常工作,適用于汽車電子、BMS、充電樁、石油化工、電力監控等領域。
RS-485屬于串行通信協議,具有良好的抗噪聲干擾性強、數據傳輸距離長和設備節點數多的特性,適用于長距離低速數據傳輸的場景。例如RS-485在交通信號燈故障檢測應用如圖7所示,ZLG面向交通信號燈故障檢測應用提供主控、無線通訊及通信接口防護產品方案。M6Y2C核心板 有豐富外設接口資源,與各類傳感器和監控設備進行連接,便于工作人員對數據進行采集和分析,精準定位到故障區域并進行解決。
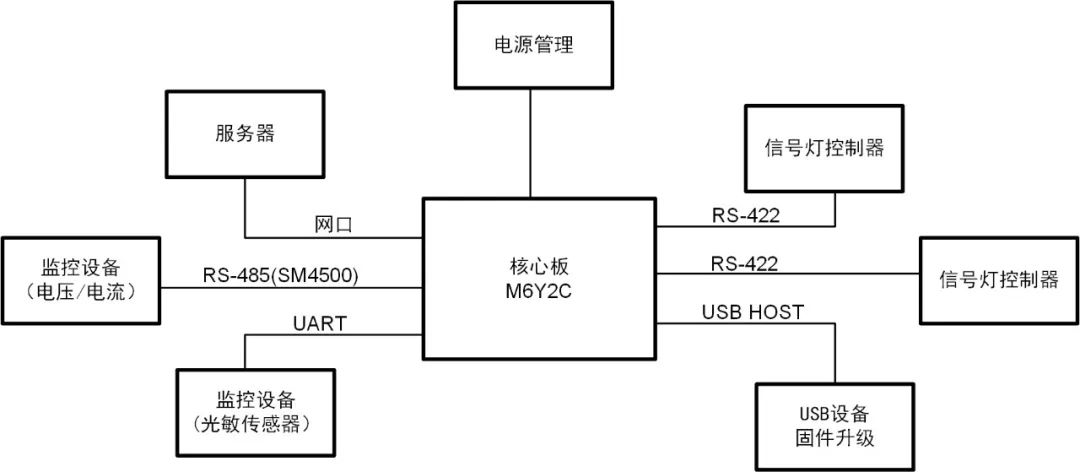
圖7RS-485總線交通信號燈故障檢測應用實例
我司推出全隔離RS-485收發芯片SM4500,采用DFN封裝,其體積僅為12.45mm*9.85mm*3.00mm,可以正常工作在-40°~+125°環境下,適用于石油化工、電力監控、軌道交通、舞臺燈光等領域。
-
CAN
+關注
關注
57文章
2715瀏覽量
463365 -
通信
+關注
關注
18文章
5969瀏覽量
135850 -
自動化
+關注
關注
29文章
5511瀏覽量
79100
發布評論請先 登錄
相關推薦
如何解決RS-485自動收發電路應用異常?

【RS-485總線】如何快速解決RS-485組網通訊異常?
RS-485總線電平異常解決方案解析
【RS-485總線】詳解RS-485上下拉電阻的選擇
【RS-485總線】RS-485網絡該如何加終端電阻?
將傳統RS-485系統與TI基于RS-485的Powerbus結合使用

靈活的RS-485:采用THVD1424的RS-485多系統簡化設計
can轉485數據是如何對應的
RS232、RS485和CAN究竟能傳輸多遠距離?






 工商網監
工商網監
評論