") BLDC電機(jī)的驅(qū)動原理詳解
BLDC電機(jī)的驅(qū)動原理詳解
大家好,我是盲僧,最近這段時間在研究BLDC電機(jī),在這里順便總結(jié)和分享一下BLDC的驅(qū)動原理。
有刷直流電機(jī)
BLDC(brushless DC electric motor)全稱是無刷直流電機(jī)。在介紹BLDC之前,這里就不得不說一下有刷直流電機(jī),然后帶著問題再看什么是直流無刷電機(jī)。
結(jié)構(gòu)
有刷直流電機(jī)發(fā)明于 19 世紀(jì),現(xiàn)在應(yīng)用仍然很普遍,相比較于無刷直流電機(jī),它的結(jié)構(gòu)會更加復(fù)雜,通常電機(jī)內(nèi)部結(jié)構(gòu)的組件都包括轉(zhuǎn)子和定子;
轉(zhuǎn)子就是旋轉(zhuǎn)的;
定子就是固定的;
然后其中一個可能是永磁體,就是那種加入稀土等材料然后可以保持長期磁性的物質(zhì);
而另一個就是線圈繞組,經(jīng)過交變電流之后,會產(chǎn)生變化的磁場,從而推動電機(jī)的轉(zhuǎn)子進(jìn)行旋轉(zhuǎn)。
下面是我小時候玩的四驅(qū)車?yán)锊鹣聛淼碾姍C(jī);
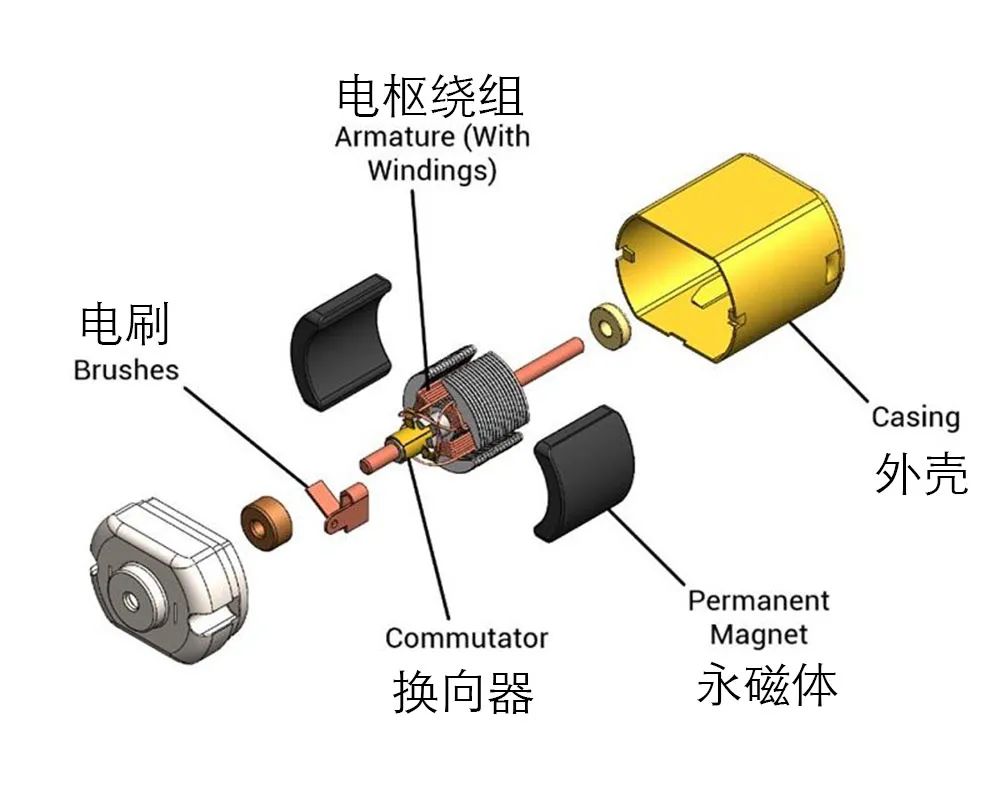
內(nèi)部結(jié)構(gòu)圖
原理
小時候拆過的小伙伴請舉手,好,言歸正傳,下面是一個簡單的兩極有刷直流電機(jī)的模型,我們來簡單分析一下它的旋轉(zhuǎn)原理;
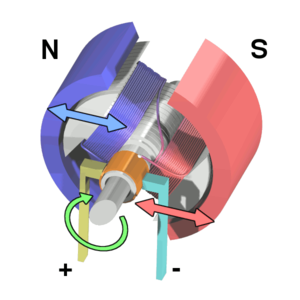
狀態(tài)一
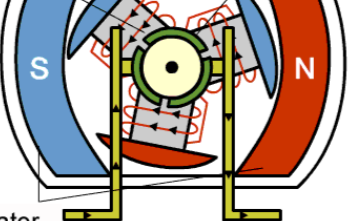
首先這里的轉(zhuǎn)子是勵磁繞組,正如前面提到的,就是線圈繞組,但是它如何通過交變電流呢,正是通過這個換向器,圖1 中金黃色的器件,
假設(shè)我們給線圈通電,這時候會在電樞周圍產(chǎn)生磁場。由于同極相斥,電樞的左側(cè)被推離左側(cè),電樞的右側(cè)被拉向右側(cè),從而導(dǎo)致轉(zhuǎn)子旋轉(zhuǎn)。
這里電樞是轉(zhuǎn)子,而永磁體是定子,其中用藍(lán)色表示N極,紅色表示S極;
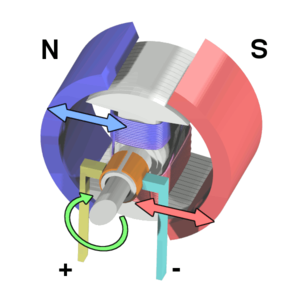
狀態(tài)二
電樞繼續(xù)旋轉(zhuǎn)。當(dāng)電樞與水平垂直時,即電樞產(chǎn)生的磁場與永磁體產(chǎn)生的磁場垂直,換向器反轉(zhuǎn)改變了通過線圈的電流方向,使磁場反轉(zhuǎn)。因此轉(zhuǎn)子可以繼續(xù)旋轉(zhuǎn)。
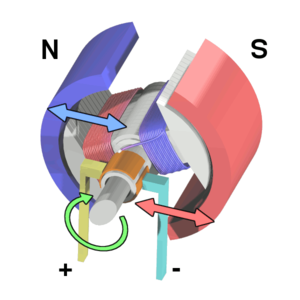
狀態(tài)三
重復(fù)以上過程,轉(zhuǎn)子就開始旋轉(zhuǎn)了,如下圖所示;
旋轉(zhuǎn)過程
其實(shí)最簡單的運(yùn)行原理看下圖就很清晰了,如果我們換一個更大的電池(電壓更高),這個線圈可能會轉(zhuǎn)的更快;
線圈旋轉(zhuǎn)
所以有刷直流電機(jī)可以很簡單地轉(zhuǎn)動起來,因?yàn)殡姍C(jī)內(nèi)部已經(jīng)幫你做好了換向的工作,所以通常可以進(jìn)行升壓和降壓調(diào)速,通常這里的做法是PWM,加上功率元器件,實(shí)現(xiàn)弱電控制強(qiáng)電,這有一部分屬于電力電子的范疇了。
最常經(jīng)常使用的就是H橋驅(qū)動電路了,可以簡單的控制電機(jī)的正轉(zhuǎn)和反轉(zhuǎn),還能通過控制PWM的占空比進(jìn)行調(diào)速,整體電路如下所示;
H橋電路
有刷直流電機(jī)雖然換相簡單,控制簡單,但是結(jié)構(gòu)相對復(fù)雜,并且在換相的時候,容易產(chǎn)生火花。
大家想象一下,把插頭插入插座的時候,是不是會產(chǎn)生火花?是的,就是這種換相開關(guān)瞬間產(chǎn)生的火花,可能會損壞電刷,所以它的維護(hù)成本就直線上升了。
好了,差不多搞清楚直流有刷電機(jī)之后,可以看看直流無刷電機(jī)到底和它有什么相同和不同的地方呢?
無刷直流電機(jī)
直流無刷電機(jī)從結(jié)構(gòu)上,比直流有刷電機(jī)少了電刷和換向器,所以內(nèi)部結(jié)構(gòu)無法自己完成換相的操作,因此就需要外部驅(qū)動信號進(jìn)行換向。
這里我們還是從內(nèi)部結(jié)構(gòu)作為切入點(diǎn),對其驅(qū)動時序進(jìn)行分析,結(jié)果就會變得清晰起來。
結(jié)構(gòu)
如下圖所示,在四軸飛行器或者一些航模上,都能看到這種類型的直流無刷電機(jī),它通常有三條線,U,V,W,當(dāng)然航模上還需要配置一個電調(diào)(ESC)——作為電機(jī)的驅(qū)動器。
這里的電調(diào)往往有兩種驅(qū)動方式,六步方波,或者FOC驅(qū)動,下面主要對六步方波驅(qū)動方式進(jìn)行分析。

無刷直流電機(jī)
我們先看一下直流無刷的內(nèi)部結(jié)構(gòu),通常是這樣的,這里由定子和轉(zhuǎn)子構(gòu)成,是電樞繞組,轉(zhuǎn)子是永磁體;兩對極電機(jī),分別是U1,V1,W1,U2,V2,W2,后面我們會進(jìn)一步進(jìn)行介紹。具體如下圖示;
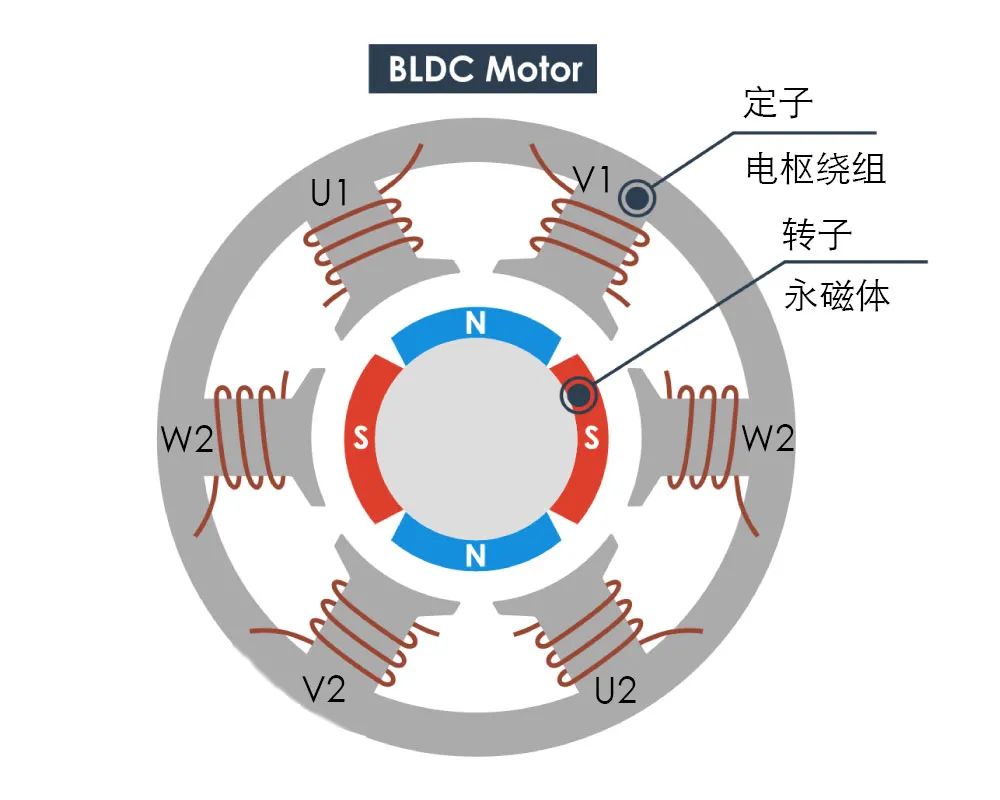
2對極BLDC內(nèi)部結(jié)構(gòu)
圖中的電機(jī)的定子是電樞繞組在通過交變電流的時候,會產(chǎn)生磁場,電樞的材料是鐵芯,可以導(dǎo)磁,這樣可以增大磁場的強(qiáng)度,磁場的方向取決于電流的方向,具體可以根據(jù)右手螺旋定則來判斷,如下圖所示;
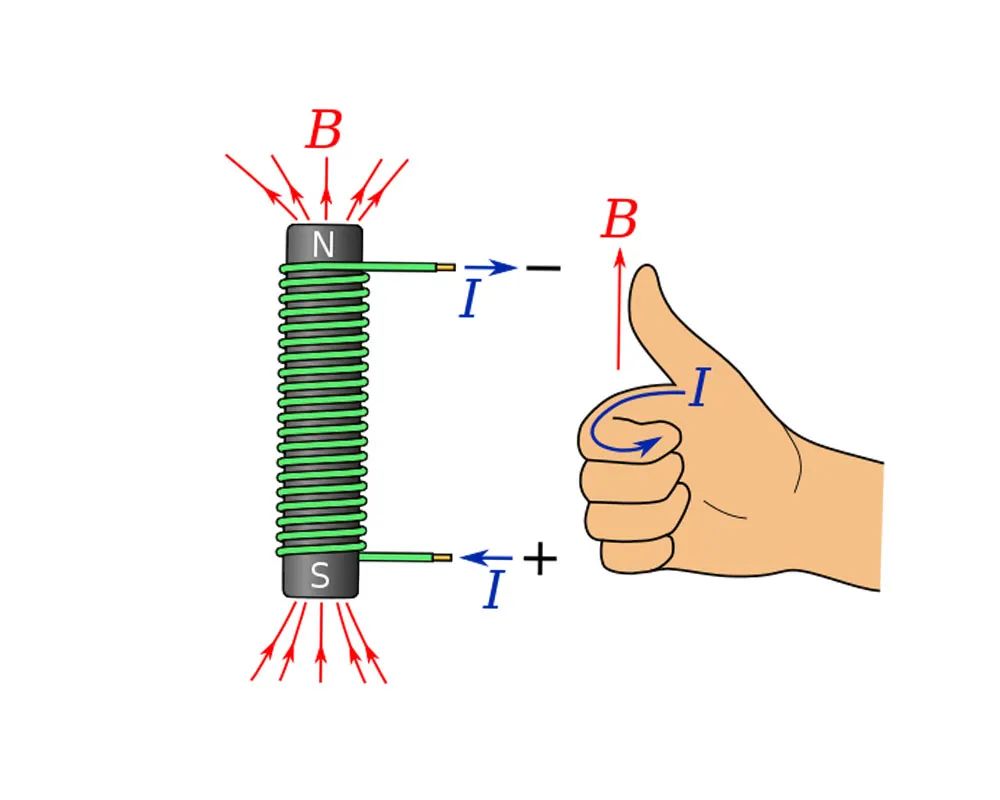
右手螺旋定則
換相原理
這里我們簡單介紹一下轉(zhuǎn)子旋轉(zhuǎn)的過程,即無刷直流電機(jī)的換相原理:
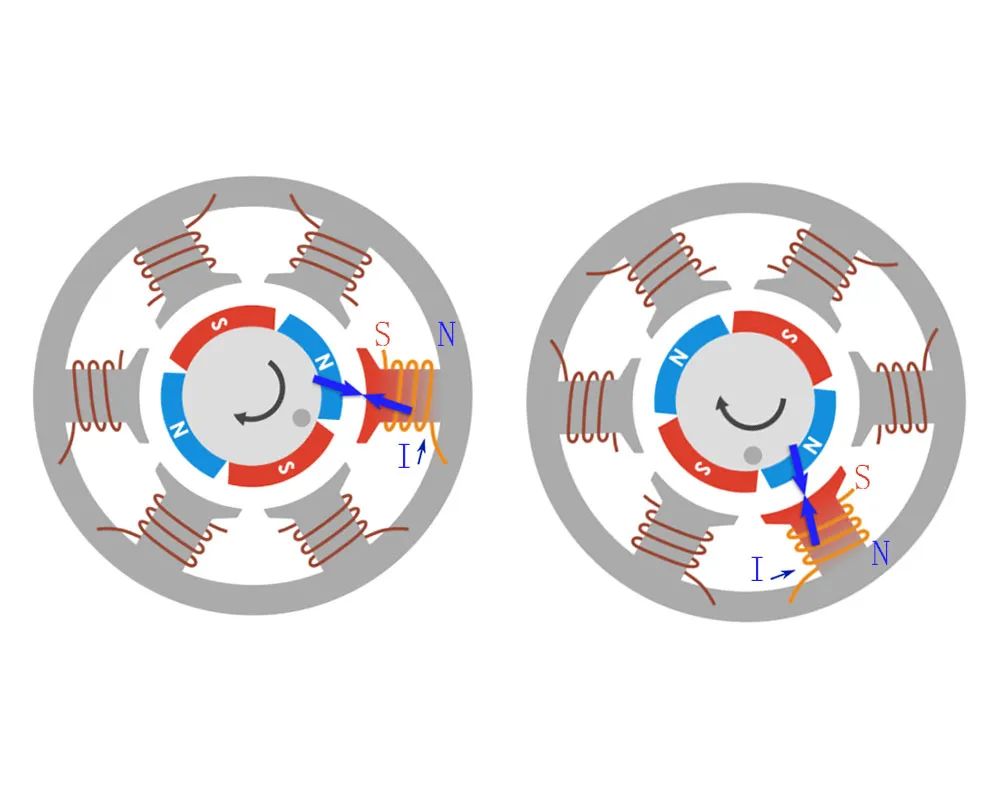
首先我們對電樞繞組施加適當(dāng)大小的電流,線圈將產(chǎn)生一個磁場,該磁場將吸引轉(zhuǎn)子的永磁體;
如果我們一個接一個地激活每個線圈,這樣可以產(chǎn)生一個旋轉(zhuǎn)的磁場,由于永磁體和電磁體之間的力相互作用,轉(zhuǎn)子將在旋轉(zhuǎn)的磁場作用下繼續(xù)旋轉(zhuǎn)。
具體如下圖所示;
旋轉(zhuǎn)磁場
但是上面提到,這里是兩對極的直流無刷電機(jī),那么為了提高電機(jī)的效率,我們可以將兩個相反的線圈組成一個繞組,這樣會產(chǎn)生與轉(zhuǎn)子極相反的磁極,從而獲得雙倍的磁場的力。
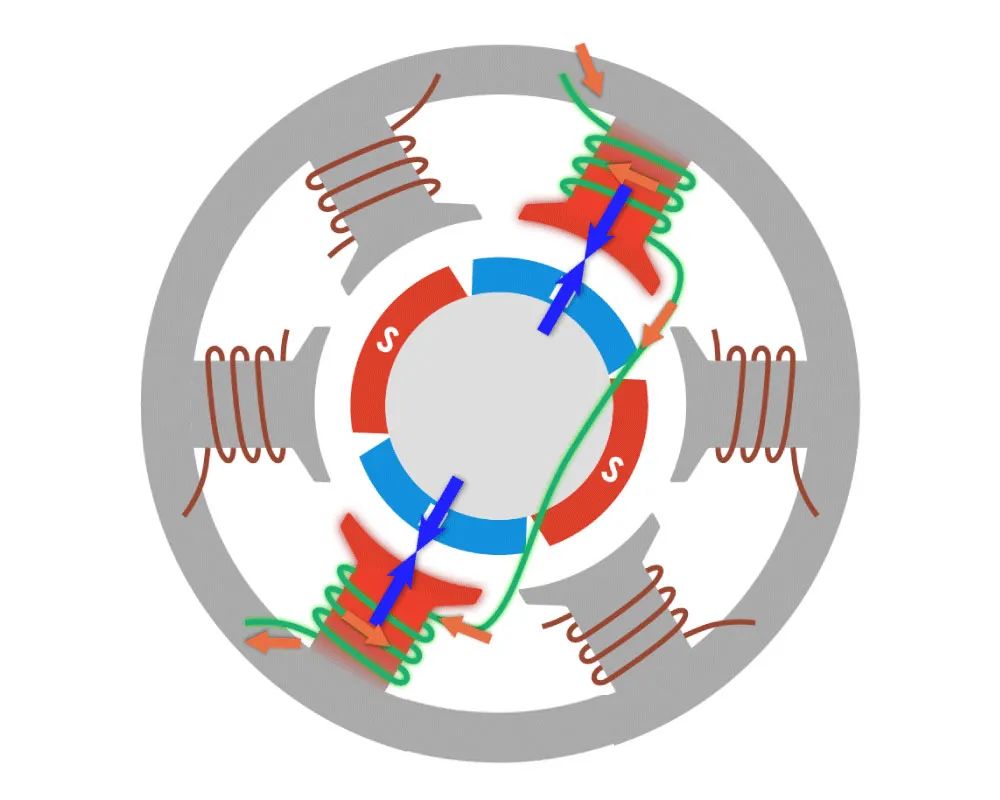
共同通電
初步了解了內(nèi)部的結(jié)構(gòu)和通電機(jī)制之后,我們就需要產(chǎn)生相應(yīng)的驅(qū)動信號去產(chǎn)生旋轉(zhuǎn)的磁場,帶動轉(zhuǎn)子轉(zhuǎn)動。如下圖所示,這是一個簡單的驅(qū)動的架構(gòu);
通常我們會在MCU中會固化一段代碼,這段代碼可以產(chǎn)生驅(qū)動信號;然后驅(qū)動信號通過IPM間接驅(qū)動六個功率開關(guān)元器件(這里可以是MOSFET),從而產(chǎn)生旋轉(zhuǎn)的磁場。
電機(jī)模型可以等效成三個星型連接的電感,所以我們需要做的工作就是如何去產(chǎn)生驅(qū)動信號。
這個驅(qū)動信號又符合什么樣的規(guī)律呢?下面我們進(jìn)一步介紹驅(qū)動信號。
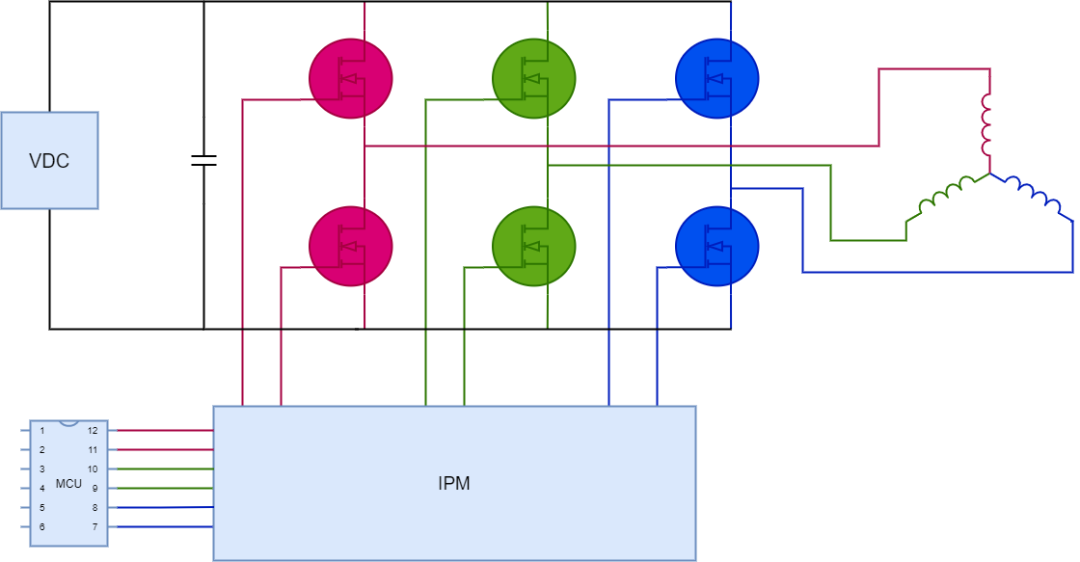
硬件架構(gòu)圖
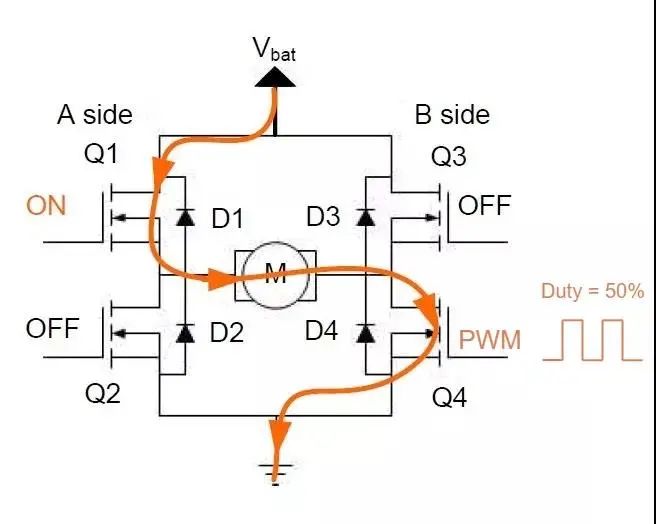
這里其實(shí)是一種兩兩通電的方式。如果我們將 A 相上拉至高電平,然后在另一側(cè)將 B 相接地,則電流將從 VCC 流過A 相,中性點(diǎn)和 B 相,最終流向地。
因此,只需一個電流,我們就可以產(chǎn)生了四個不同的磁極,從而導(dǎo)致轉(zhuǎn)子移動,內(nèi)部的電流走向如下圖所示;
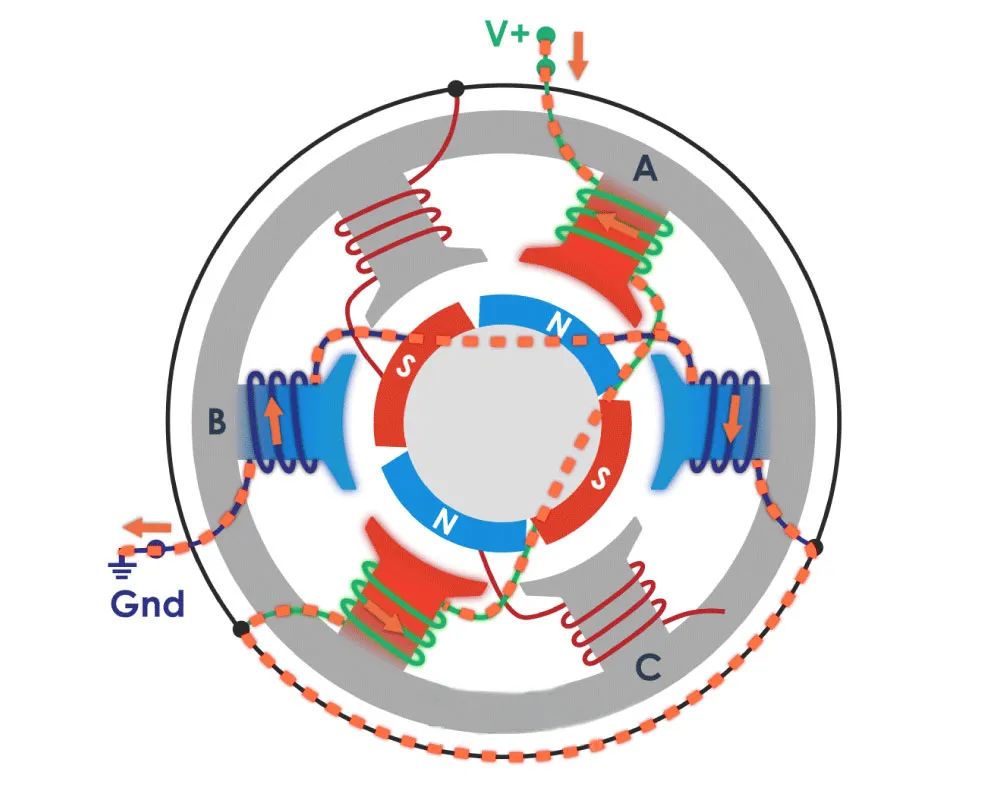
兩兩通電的情況
其實(shí)電機(jī)內(nèi)部一般可以等效成一個星型的連接方式,A,B,C三相的中性點(diǎn)連接在一起,外部通過MOSFET或者IGBT組成功率開關(guān)元器件,進(jìn)行控制,所以這里也可以說明無刷直流電機(jī),通常有U,V,W三條線引出來。
兩兩通電的其中一種狀態(tài)如下圖所示,此時的狀態(tài)可以標(biāo)注為a+,b-,c0,下面我們會進(jìn)一步進(jìn)行解釋;
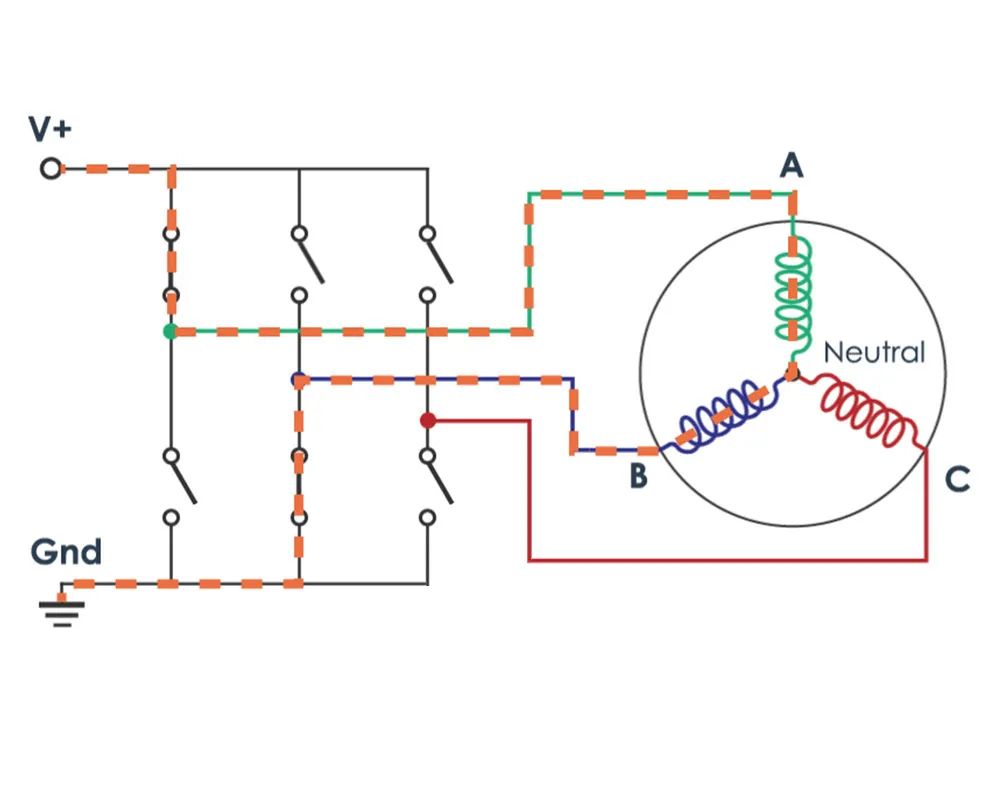
兩兩通電外部結(jié)構(gòu)圖
首先規(guī)定一下我們的驅(qū)動電路的相應(yīng)符號:
使用SW1和SW2作為一個上下管驅(qū)動U,或者是a;
使用SW3和SW4作為一個上下管驅(qū)動V,或者是b;
使用SW5和SW6作為一個上下管驅(qū)動W,或者是c;
然后我們在這里規(guī)定:上管打開標(biāo)記為+,下管打開標(biāo)記為-,上下管都不開標(biāo)記為0。
最終讓轉(zhuǎn)子朝一個方向旋轉(zhuǎn)的驅(qū)動時序應(yīng)該是這樣的:
a+,b-,c0
a+,b0,c-
a0,b+,c-
a-,b+,c0
a-,b0,c+
a0,b-,c+
具體如下圖示:
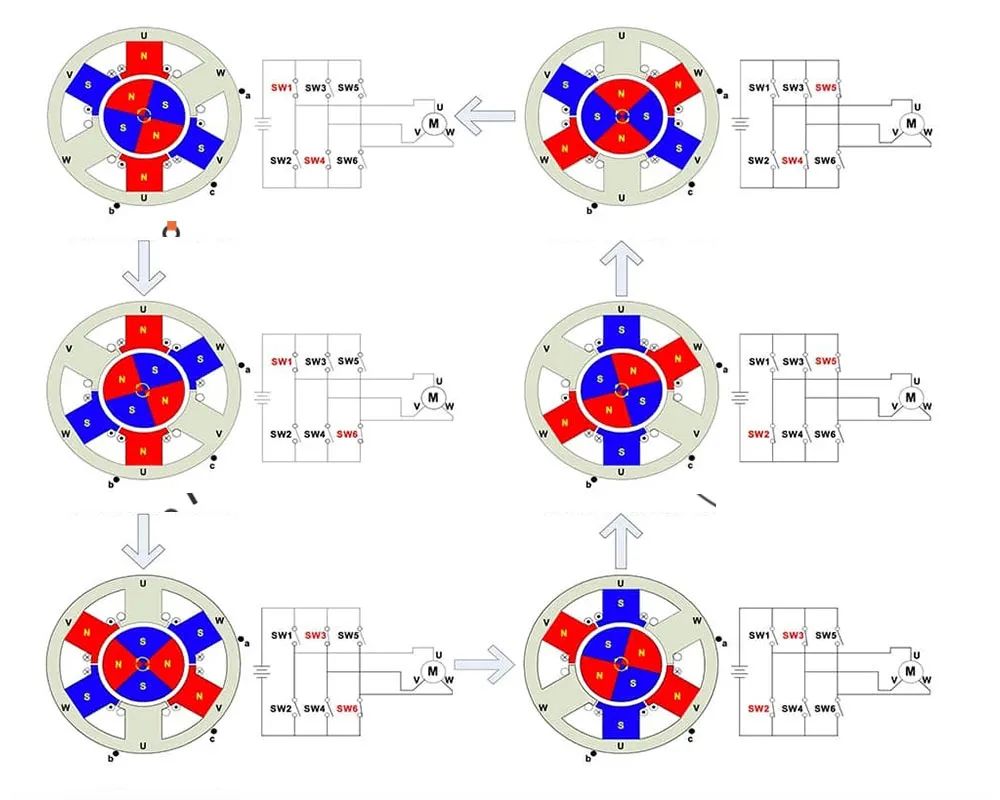
六步方波
驅(qū)動的六步方波時序正確之后,我們基本可以實(shí)現(xiàn)對無刷直流電機(jī)的開環(huán)控制驅(qū)動了;
具體的驅(qū)動時序可以簡單畫一下,對于每一相而言都需要六步的驅(qū)動時序,然后兩相之間的相位相差120°。
例如A相的六步相序需要比B相超前120°,B相需要比C相超前120°,
整體應(yīng)該如下圖所示;
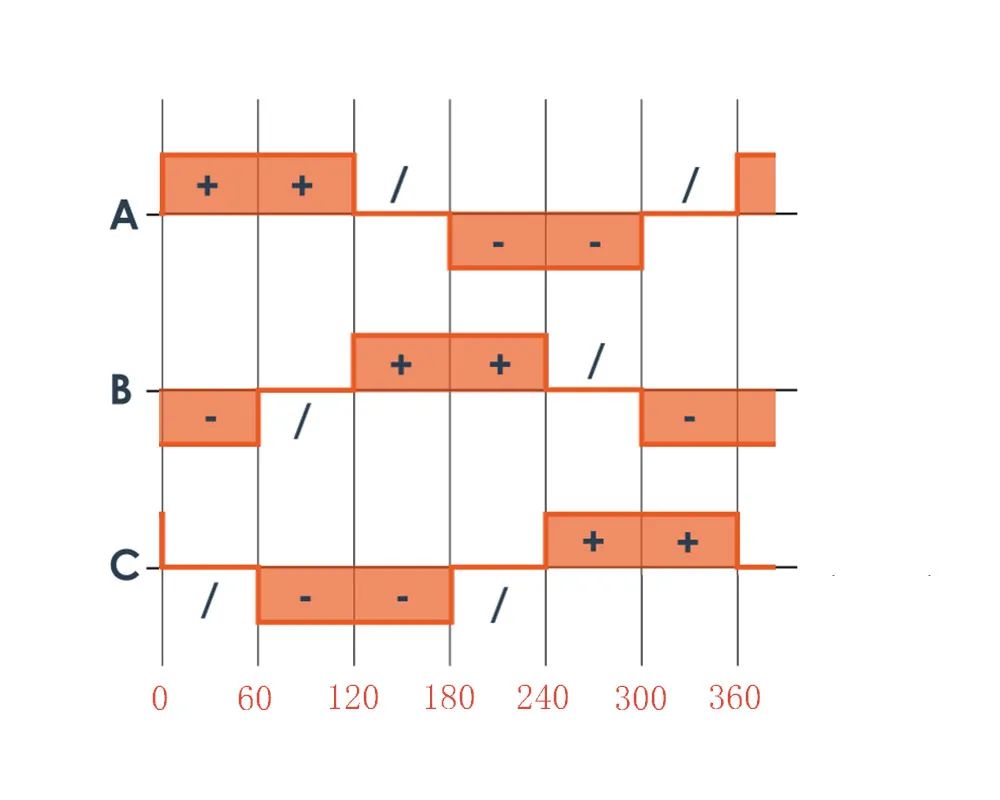
驅(qū)動信號時序
下面是我實(shí)際過程中測試的上管的方波驅(qū)動信號,可以和A相,B相,C相的信號對應(yīng)起來。

實(shí)測波形
閉環(huán)控制
實(shí)現(xiàn)開環(huán)運(yùn)行之后,就要進(jìn)行閉環(huán)控制了,首先有一點(diǎn)需要說明的是,前面的六步PWM時序,并沒有根據(jù)轉(zhuǎn)子的實(shí)際位置進(jìn)行磁場的切換,所以可能出現(xiàn)的情況,就是失步,這個有點(diǎn)類似步進(jìn)電機(jī)。
結(jié)論就是實(shí)際磁場旋轉(zhuǎn)的速度可能遠(yuǎn)快于轉(zhuǎn)子旋轉(zhuǎn)的速度,導(dǎo)致磁場的旋轉(zhuǎn)速度和轉(zhuǎn)子不同步,所以就造成了失步。
如果這里引入轉(zhuǎn)子的位置反饋量,就可以完美的解決這個問題,所以通常會加入霍爾傳感器來檢測實(shí)際的轉(zhuǎn)子位置。
轉(zhuǎn)子處于不同位置的時候霍爾傳感器會產(chǎn)生相應(yīng)的信號,并且還可以根據(jù)霍爾信號計(jì)算轉(zhuǎn)速,作為后面速度閉環(huán)的反饋值,霍爾信號具體如下圖所示;
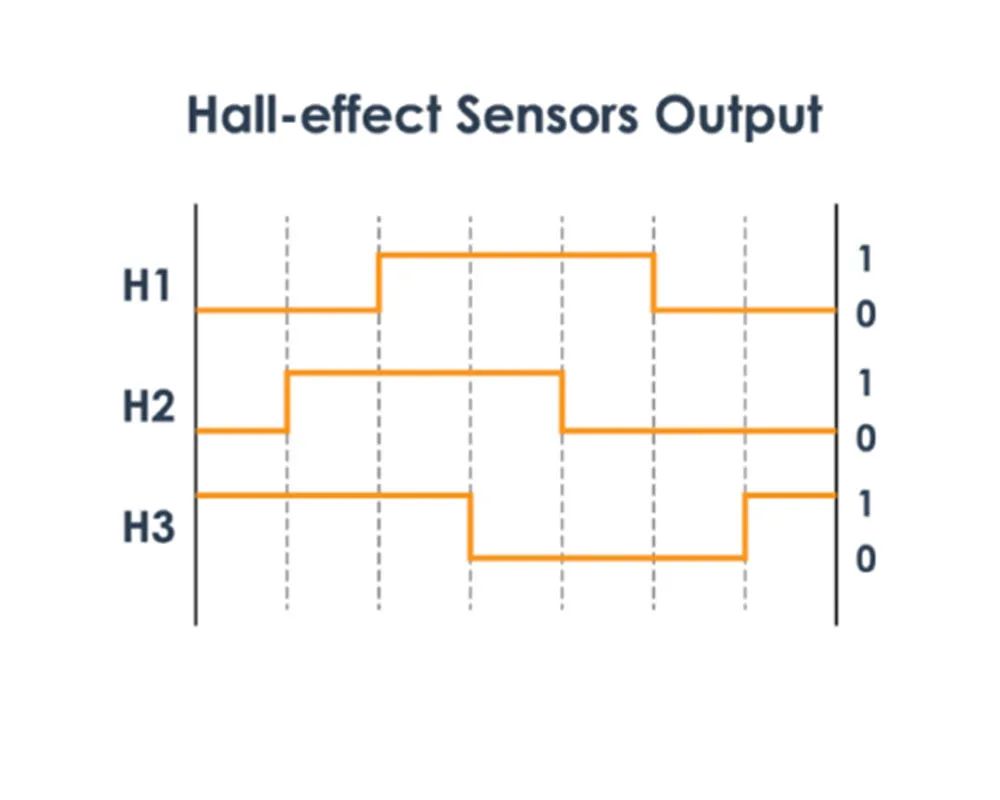
霍爾信號
一般來說增加了霍爾傳感器,在成本和電機(jī)的結(jié)構(gòu)復(fù)雜程度上都會大大增加,所以,這里可以通過檢測每一相的反電動勢(Back EMF),來進(jìn)行位置的估算以及速度的計(jì)算。
無刷直流電機(jī)的反電動勢是梯形反電動勢,具體如下圖所示;
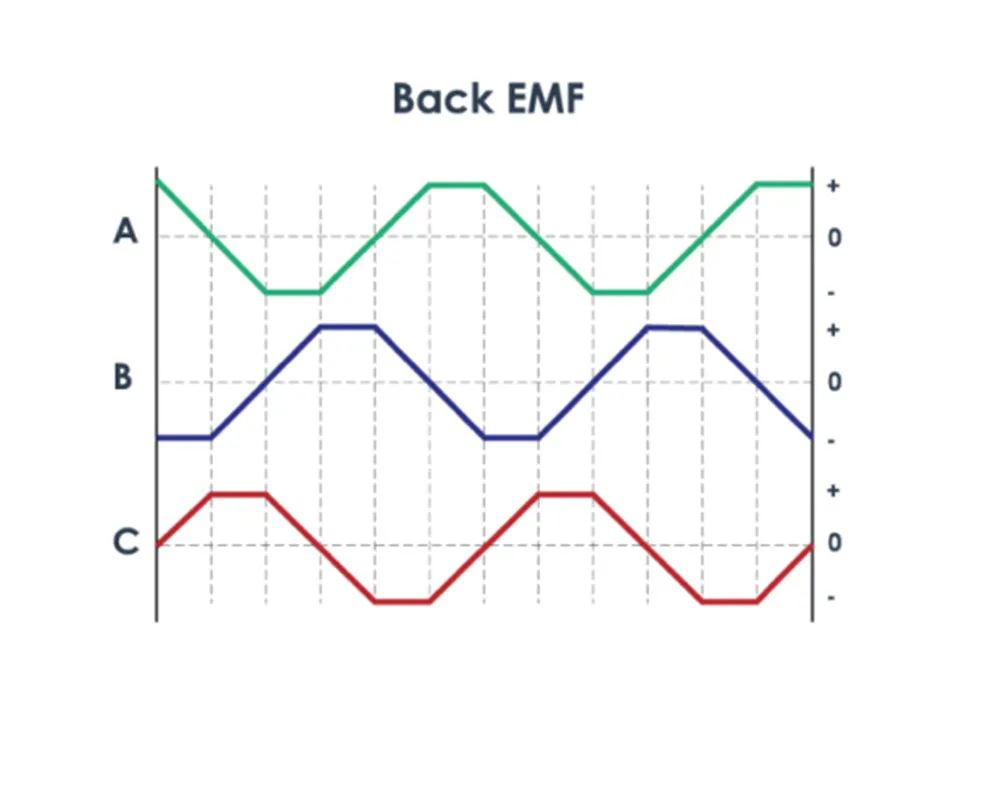
反電動勢
無感方波的驅(qū)動方式難點(diǎn)在于啟動和過零點(diǎn)的檢測上,通常啟動可以使用三段式啟動的方式,即轉(zhuǎn)子預(yù)定位,開環(huán)強(qiáng)拖,開環(huán)切閉環(huán),這三個過程。
另外還可以進(jìn)行高頻注入的方式確定轉(zhuǎn)子的初始位置,然后直接進(jìn)行啟動,在過零點(diǎn)的檢測和換相存在一定的難度。
結(jié)論
本文簡單介紹了有刷直流電機(jī)和無刷直流電機(jī)的結(jié)構(gòu)和原理,以及各自的優(yōu)勢。進(jìn)一步介紹了無刷直流電機(jī)的六步方波驅(qū)動原理,簡單提及了閉環(huán)控制中一些注意點(diǎn)。作者水平有限,文中難免存在不足和錯誤之處,請各位大佬不吝賜教。
好的,這期就先到這里,我們下期再見。
-
線圈
+關(guān)注
關(guān)注
14文章
1748瀏覽量
44192 -
BLDC
+關(guān)注
關(guān)注
201文章
773瀏覽量
96469 -
BLDC電機(jī)
+關(guān)注
關(guān)注
7文章
202瀏覽量
21344 -
直流無刷電機(jī)
+關(guān)注
關(guān)注
15文章
285瀏覽量
23718 -
有刷直流電機(jī)
+關(guān)注
關(guān)注
1文章
99瀏覽量
12483
原文標(biāo)題:BLDC驅(qū)動入門最簡教程
文章出處:【微信號:南山掃地僧,微信公眾號:南山掃地僧】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
#電機(jī)驅(qū)動 BLDC電機(jī)驅(qū)動的基本需求
#電機(jī)驅(qū)動 BLDC電機(jī)驅(qū)動的換向
TI BLDC電機(jī)驅(qū)動的結(jié)構(gòu)及實(shí)現(xiàn)驅(qū)動的要求
TMPM370無傳感器BLDC電機(jī)驅(qū)動的控制方法和電路等資料詳解
什么是BLDC電機(jī)?BLDC電機(jī)是如何旋轉(zhuǎn)的?
無刷電機(jī)驅(qū)動器資料BLDC-5015A

BLDC直流無刷電機(jī)驅(qū)動
BLDC電機(jī)驅(qū)動開發(fā)的小技巧

bldc電機(jī)什么意思 bldc電機(jī)和fpa直驅(qū)電機(jī)哪個好

bldc電機(jī)是變頻電機(jī)嗎 bldc的控制方式
bldc六步驅(qū)動法原理 BLDC無刷直流電機(jī)和bldc電機(jī)有啥區(qū)別
BLDC電機(jī)控制算法詳解
使用PWM生成模式驅(qū)動BLDC電機(jī)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論