 基于ST LSM6DSV16BX多功能MEMS Sensor的TWS方案
基于ST LSM6DSV16BX多功能MEMS Sensor的TWS方案
在Apple公司的引領導下,TWS真藍牙耳機技術不斷出新:360度立體音效,骨傳導主動降噪,人體接近檢測,手勢UI,智能電源管理。這些功能不斷提升TWS真藍牙耳機的使用感受。
要實現這些功能,需要將一堆元器件堆疊在狹小的空間內,加工難度巨大。
ST 適時推出多功能MEMS Sensor LSM6DSV16BX,在2.5 mm x 3.0 mm x 0.71 mm的封裝里集成了3 軸加速度計和3軸陀螺儀:慣性UI模塊,骨傳導模塊,Qvar靜電傳感器和MLC嵌入機器學習核心。能極大節省TWS內部空間,降低功耗,改善TWS人體工學設計,延長電池使用時間。是一款不可多得的好產品。
LSM6DSV16BX集成功能:
1.高精確度3 軸加速度計和3軸陀螺儀:支持頭部360度動作跟蹤, 實現3D立體音效
2.手勢UI:支持單擊,雙擊,三擊手勢,實現靈活功能控制
3. 骨傳導:檢測顎骨的振動,結合音頻算法,實現高精確度主動降功能
4. 靜電傳感器:通過測量人體靜電電位的變化,來進行入耳檢測,輕觸感知,進行精準電源管理,噪聲消除
5. 嵌入機器學習核心:自主學習、判斷不同的應用場景,實時調整和模塊功能,實現性能和功耗的最優化搭配
?場景應用圖

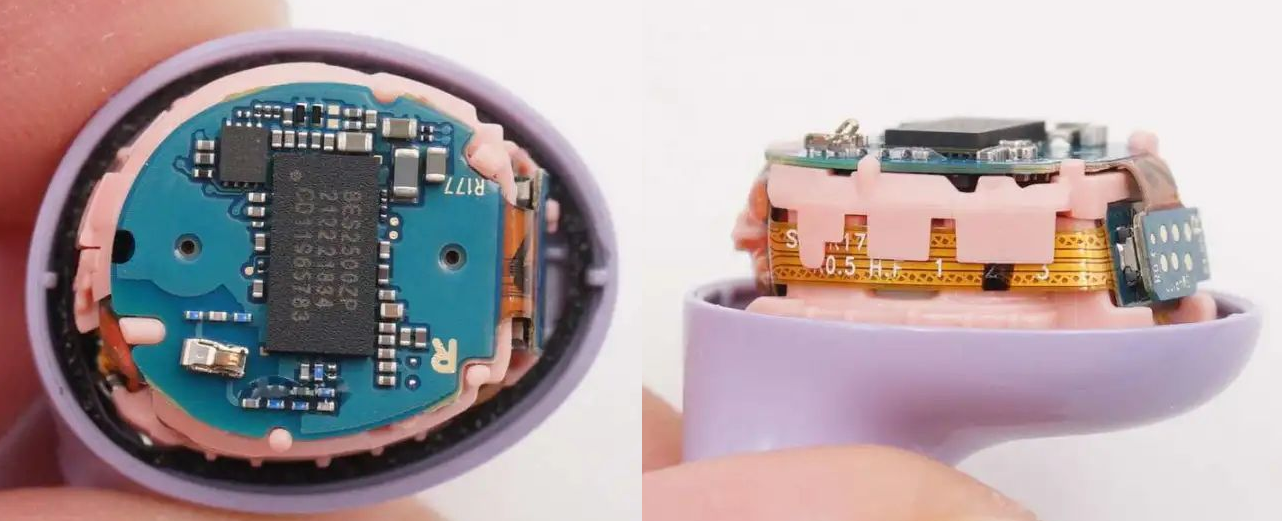
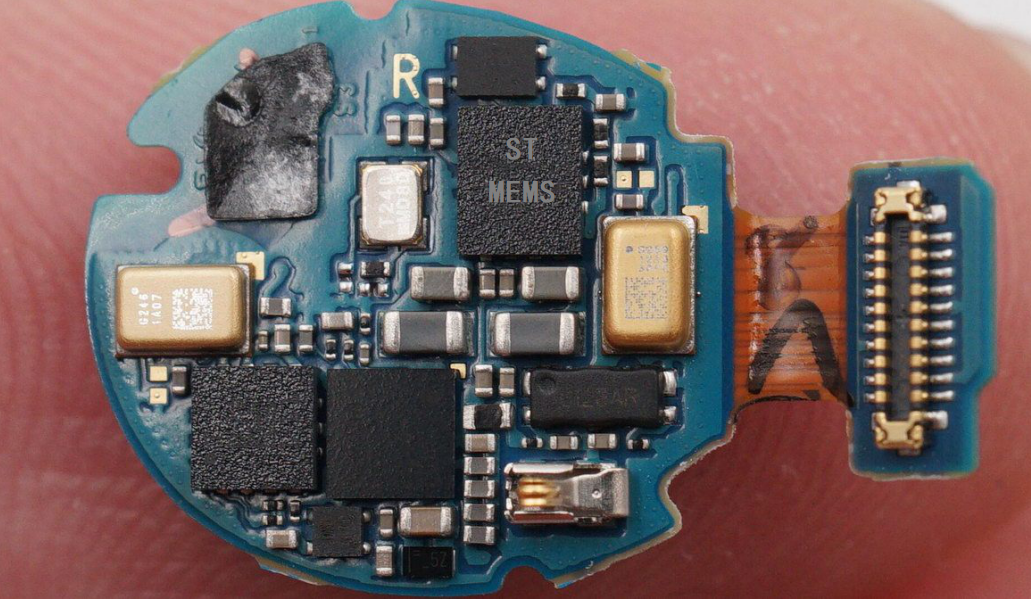
?產品實體圖
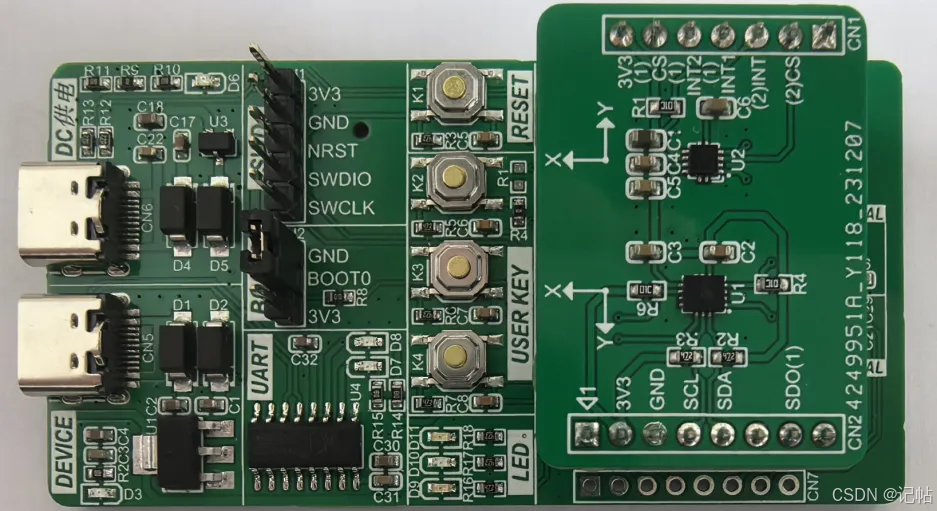
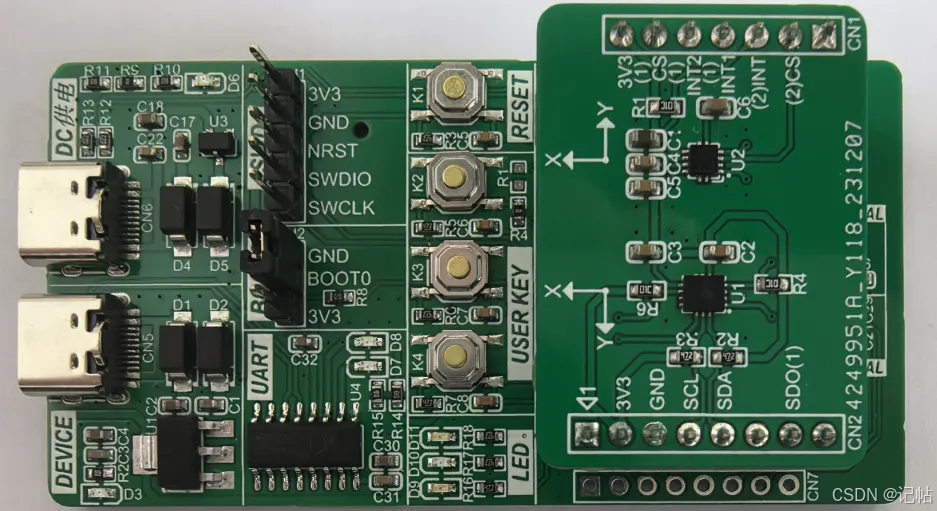
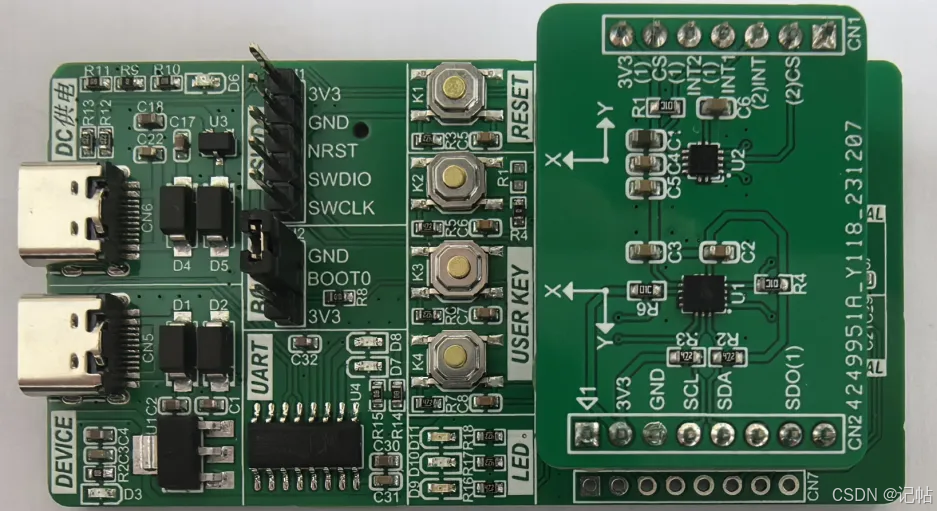
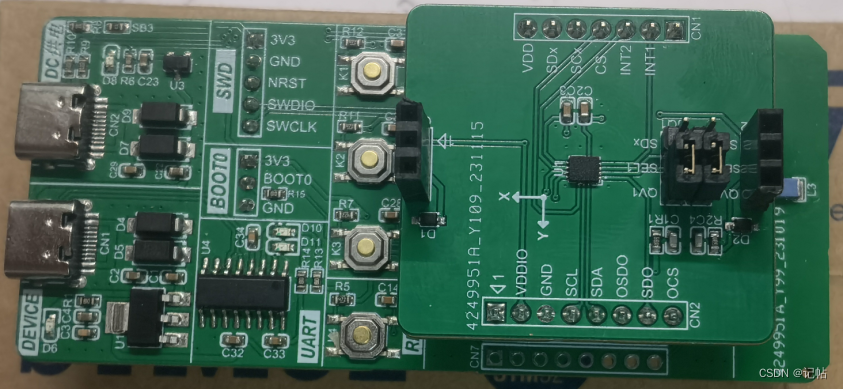
?展示板照片
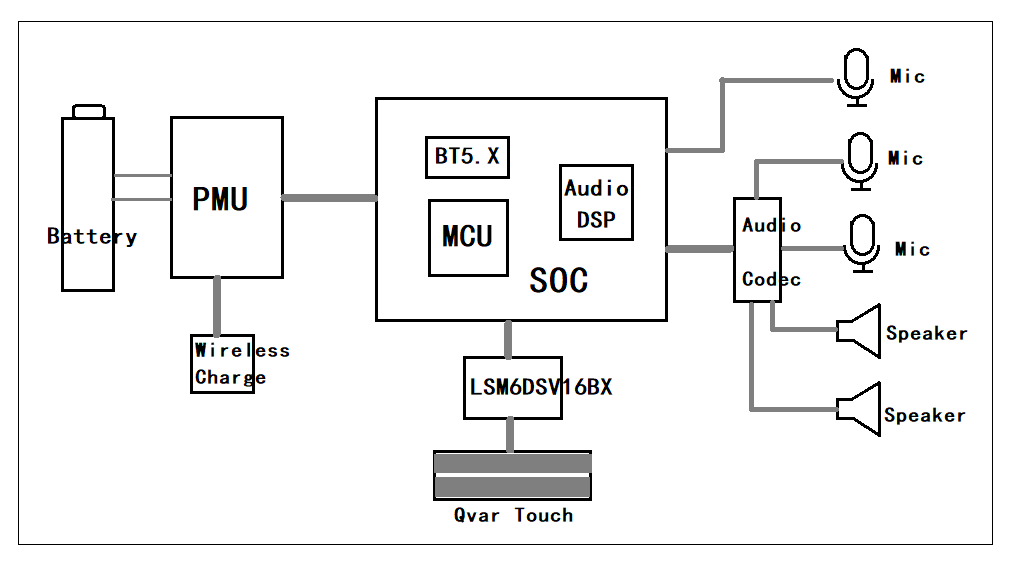
?方案方塊圖
?核心技術優勢
1. 集成高精度3 軸加速度計+3軸陀螺儀
2. 集成骨傳導、Qvar傳感和三核UI
3. 集成機器學習核心
4. 小封裝: 2.5 mm x 3.0 mm x 0.71 mm
5. 低功耗:在combo高性能模式下0.95 mA
6. 1.2V低電壓IO支持:1.08 V~ 3.6 V
7. 骨傳導音頻性能:THD+N <1%?
8. 成熟第3方音頻算法配合
?方案規格
?智能FIFO: 最大4.5 KB空間
?Accel 量程: ±2/±4/±8/±16 g |
?Gyro量程: ±125/±250/±500/±1000/±2000/±4000 DPS
?模擬電源電壓: 1.71 V ~ 3.6 V
?獨立IO電源: 擴展范圍:1.08 V至3.6 V
?封裝:2.5 mm × 3mm × 0.71 mm
?SPI / I2C和MIPI I3C?v1.1串行接口,支持主處理器數據同步
?TDM從接口
?先進的計步器,步長檢測器,步長計數器
?運動檢測,傾斜檢測 ?標準中斷:自由落體中斷,喚醒中斷,6D方向中斷,點擊和雙擊中斷 |
?可編程的有限狀態機可用于加速度計,陀螺儀和Qvar傳感器算法處理
?機器學習核心與輸出功能和過濾器的AI應用程序
?集成Qvar:電荷變化檢測
?集成ADC模擬集線器和模擬輸入數據處理
?集成傳感器融合低功耗算法
?集成溫度傳感器
? 技術文檔
方案技術文檔下載,請至大大通。
-
ST
+關注
關注
32文章
1130瀏覽量
128837 -
AI
+關注
關注
87文章
30238瀏覽量
268471 -
IOT
+關注
關注
186文章
4181瀏覽量
196270 -
TWS
+關注
關注
17文章
390瀏覽量
39814
發布評論請先 登錄
相關推薦
陀螺儀LSM6DSV16X與AI集成(14)----上報匿名上位機
陀螺儀LSM6DSV16X與AI集成(13)----中斷獲取SFLP四元數
LSM6DSV16X基于MLC智能筆動作識別(4)----中斷獲取智能筆狀態
LSM6DSV16X基于MLC智能筆動作識別(3)----MEMS Studio訓練數據
LSM6DSV16X基于MLC智能筆動作識別(2)----MLC數據采集
LSM6DSV16X基于MLC智能筆動作識別(1)----輪詢獲取陀螺儀數據
意法半導體新款MEMS IMU LSM6DSV32X實現精確姿態識別應用
陀螺儀LSM6DSV16X與AI集成(7)----FIFO數據讀取與配置

請問lsm6dsv16x可以直接讀取觸摸手勢嗎?
使用LSM6DSO16IS的ISPU的9軸數據的幾個疑問求解
意法半導體發布LSM6DSV32X 6軸慣性模塊
意法半導體推出一款LSM6DSV32X 6軸慣性模塊(IMU)
陀螺儀LSM6DSV16X與AI集成(3)----讀取融合算法輸出的四元數


陀螺儀LSM6DSV16X與AI集成(1)----輪詢獲取陀螺儀數據





 工商網監
工商網監
評論