") 伺服系統(tǒng)原理及分類
伺服系統(tǒng)原理及分類
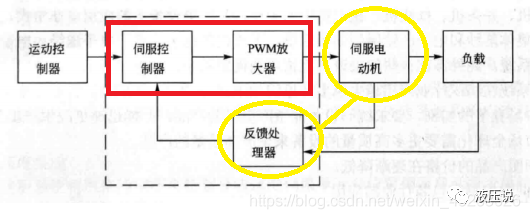
伺服系統(tǒng)主要由伺服控制器、驅(qū)動(dòng)電路、伺服電動(dòng)機(jī)及相應(yīng)反饋檢測器件組成。
1.伺服系統(tǒng)原理
當(dāng)人為的給定控制信號并被伺服控制系統(tǒng)接收時(shí),執(zhí)行機(jī)構(gòu)就會(huì)按照控制信號的指令進(jìn)行一系列的運(yùn)動(dòng)和動(dòng)作;如果不再出現(xiàn)信號,被控傳動(dòng)裝置停止動(dòng)作直到控制信號的來臨。
2.伺服系統(tǒng)分類
(1)根據(jù)其作用對象的不同,可分為位置伺服系統(tǒng)和速度伺服系統(tǒng)兩大類。
1)位置伺服系統(tǒng)
是指能夠?qū)δ繕?biāo)指令位置進(jìn)行精確的跟蹤和定位的伺服系統(tǒng)。根據(jù)有無反饋,位置伺服系統(tǒng)分為開環(huán)控制和閉環(huán)控制兩種。
開環(huán)位置伺服系統(tǒng)具有結(jié)構(gòu)簡單、成本低的優(yōu)點(diǎn),但是不具有位置、速度反饋功能,其位置控制精度依賴于步進(jìn)電機(jī)的步距角和傳動(dòng)機(jī)構(gòu)的精度。
閉環(huán)控制分為全閉環(huán)控制和半閉環(huán)控制。全閉環(huán)控制下,檢測元件直接檢測被控對象在工作臺上的位移,并把該位移反饋給控制器,以構(gòu)成全閉環(huán)控制。由于控制器可以根據(jù)被控對象的實(shí)際位移進(jìn)行控制,因此全閉環(huán)控制具有很高的定位精度,可以消除從電機(jī)到機(jī)械傳動(dòng)機(jī)構(gòu)再到被控對象,整個(gè)過程的誤差。然而,閉環(huán)控制結(jié)構(gòu)比較復(fù)雜,成本較高,難以實(shí)現(xiàn)。
2)速度伺服系統(tǒng)
通常被驅(qū)動(dòng)機(jī)具的負(fù)載力矩是經(jīng)常變化的,供電電源的電壓和頻率也是經(jīng)常變化的,那么,被驅(qū)動(dòng)對象的運(yùn)行速度通常也是變化的。因此,速度伺服系統(tǒng)主要任務(wù)是保持被驅(qū)動(dòng)的機(jī)具 (或稱負(fù)載) 在所需要的精確的速度 (絕不是1種速度)下穩(wěn)定運(yùn)行。
(2)按照其執(zhí)行電動(dòng)機(jī)的不同又可分為直流伺服系統(tǒng)和交流伺服系統(tǒng)。
1)直流伺服系統(tǒng)
直流伺服系統(tǒng)指的就是伺服電機(jī)是采用直流電機(jī)的伺服系統(tǒng)。
2)交流伺服系統(tǒng)
交流伺服系統(tǒng)主要由交流伺服驅(qū)動(dòng)器(或稱控制器)和交流伺服電動(dòng)機(jī)組成,系統(tǒng)以驅(qū)動(dòng)器為核心,驅(qū)動(dòng)控制交流伺服電動(dòng)機(jī)的運(yùn)轉(zhuǎn),轉(zhuǎn)矩、速度或位置的閉環(huán)控制使系統(tǒng)動(dòng)態(tài)性能和靜態(tài)性能優(yōu)異。工業(yè)機(jī)器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業(yè)機(jī)器人電動(dòng)伺服系統(tǒng)的一般結(jié)構(gòu)為三個(gè)閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對于交流伺服驅(qū)動(dòng)器,可通過對其內(nèi)部功能參數(shù)進(jìn)行人工設(shè)定而實(shí)現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。
伺服系統(tǒng)(servomechanism)又稱隨動(dòng)系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。
伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來的產(chǎn)品,是一種以機(jī)械位置或角度作為控制對象的自動(dòng)控制系統(tǒng)。伺服系統(tǒng)除了可以進(jìn)行速度與轉(zhuǎn)矩控制外,還可以進(jìn)行精確、快速、穩(wěn)定的位置控制。
廣義的伺服系統(tǒng)是精確地跟蹤或復(fù)現(xiàn)某個(gè)給定過程的控制系統(tǒng),也可稱作隨動(dòng)系統(tǒng)。
狹義伺服系統(tǒng)又稱位置隨動(dòng)系統(tǒng),其被控制量(輸出量)是負(fù)載機(jī)械空間位置的線位移或角位移,當(dāng)位置給定量(輸入量)作任意變化時(shí),系統(tǒng)的主要任務(wù)是使輸出量快速而準(zhǔn)確地復(fù)現(xiàn)給定量的變化。
-
控制器
+關(guān)注
關(guān)注
112文章
15874瀏覽量
175325 -
伺服
+關(guān)注
關(guān)注
16文章
638瀏覽量
40752 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
556瀏覽量
39085
發(fā)布評論請先 登錄
相關(guān)推薦
伺服系統(tǒng)基本概念和與變頻的關(guān)系
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹

影響伺服系統(tǒng)穩(wěn)態(tài)速度精度的因素
開環(huán)閉環(huán)半閉環(huán)伺服系統(tǒng)的區(qū)別
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹
伺服系統(tǒng)與步進(jìn)系統(tǒng)的區(qū)別
直流伺服系統(tǒng)的結(jié)構(gòu)與工作原理
交流伺服系統(tǒng)的組成和應(yīng)用
伺服系統(tǒng)的分類及主要特點(diǎn)
伺服系統(tǒng)的結(jié)構(gòu)組成及應(yīng)用場景
淺析伺服系統(tǒng)的發(fā)展的幾個(gè)階段

伺服系統(tǒng)特性測試方法
交流伺服系統(tǒng)的分類及應(yīng)用場合

液壓伺服系統(tǒng)的類型和應(yīng)用
什么是伺服系統(tǒng)?伺服系統(tǒng)的分類、組成及特點(diǎn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論