 智能容錯的定義和實現方法 控制系統冗余的關鍵技術
智能容錯的定義和實現方法 控制系統冗余的關鍵技術
容錯控制的研究雖然面臨著空前的挑戰,但近些年來,相關研究領域,如魯棒控制理論,模糊控制,神經網絡控制研究的不斷深入和發展,也給容錯控制的研究帶來了良好的機遇,提供了充分的條件。
而計算機控制技術、人工智能等技術的飛速發展,使得容錯控制技術在實際工程中應用的可能性變得越來越大。
容錯概念的由來
所謂容錯:就是容許錯誤,是指設備的一個或多個關鍵部分發生故障時,能夠自動地進行檢測與診斷,并采取相應措施,保證設備維持其規定功能,或犧牲性能來保證設備在可接受范圍內繼續工作。
錯誤一般分為兩類:第一類是先天性的固有錯,如元器件生產過程中造成的錯、線路與程序在設計過程中產生的錯。這一類的錯誤需對其拆除、更換或修正,是不能容忍的。第二類是后天性的錯,它是由于設備在運行中產生了缺陷所導致的故障。這種故障有瞬時性、間歇性和永久性的區別。
容錯技術是提高系統可靠性的重要途徑。常采用的容錯方法有硬件容錯、軟件容錯、信息容錯和時間容錯。
提高系統的可靠性一般有兩種辦法:1、采用縝密的設計和質量控制方法來盡量減少故障出現的概率。2、以冗余資源為代價來換取可靠性。
利用前一種方法來提高系統的可靠性是有限的,要想進一步的提高必須采用容錯技術。
容錯控制技術在國外發展的比較早,是計算機奠基人之一,美籍匈牙利數學家馮?諾依曼提出的。隨著八十年代微型計算機的迅速發展和廣泛應用,容錯技術也得到了飛速的發展,容錯技術被應用到各個環境中。
我國的容錯技術現在發展的也很迅速,一些重要的工作場合如航天、電廠等現在都采用了容錯技術。
1、 智能容錯的定義
智能容錯IFT(Intelligent Fault-Tolerance):就是設備在運行過程中一個或多個關鍵部件發生故障或即將發生故障之前,利用人工智能理論和方法,通過采取有效措施,對故障自動進行補償、抑制、消除、修復,以保證設備繼續安全、高效、可靠運行,或以犧牲性能損失為代價,保證設備在規定的時間內完成其預定功能。
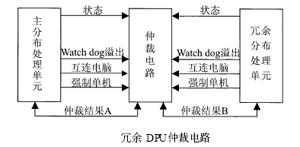
硬件智能容錯 HIFT (Hardware Intelligent Fault Tolerant) 主要采用硬件冗余技術。其基本思想是對設備的關鍵部件配備多重相似或相同部件,一旦檢測和診斷出設備發生故障就可以立刻切換到備份部件,以達到故障容錯的目的。
二冗余結構原理圖
2、硬件智能容錯方式的分類
硬件智能容錯按其工作方式可以分為:靜態冗余、動態冗余和混合冗余。
靜態冗余容錯是通過表決和比較屏蔽系統中出現的故障,如圖
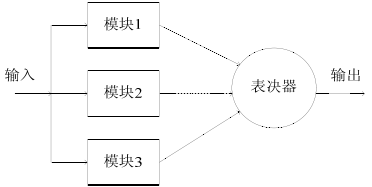
三模冗余(靜態冗余)TMR系統結構圖
靜態冗余容錯的主要特點是:
(1)由于故障被屏蔽,所以不需要識別故障;
(2)容易與無冗余系統進行轉換;
(3)所有模件都消耗能量。
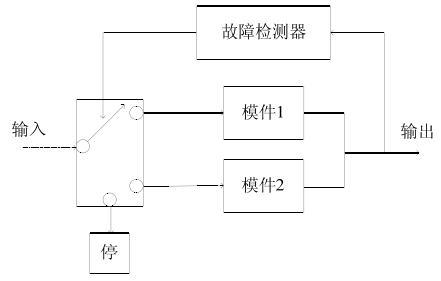
動態冗余的主要方式是多重模塊相繼運行來維持設備正常工作。當檢測到工作模塊出現故障時,一個備用模塊立即接替故障模塊并投入工作。
動態冗余容錯控制的主要特點是:
(1)僅有一個模件消耗能量;
(2)模件數目可隨任務而改變,不會影響系統工作;
(3)轉換裝置和檢測裝置中任一故障都會導致系統失效。
動態冗余容錯控制結構圖
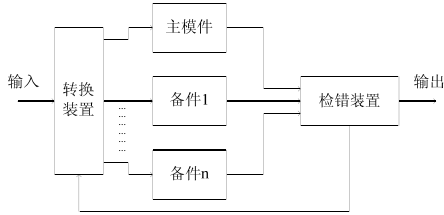
混合冗余兼動態冗余和靜態冗余之所長,通常用H(n,k)來表示,如下圖所示。圖中的V為表決器,n表示模塊的總數,k代表以表決方式實現靜態冗余的模塊數,而其余N-K個模塊則作為表決系統中模塊的備份。當參與表決的k個模塊中(通常k>=3)有一個模塊出現故障時,備份就替代該模塊參與表決,維持靜態冗余系統的完整。當所有備份都被替換完后,系統就成為一般的表決系統。
如在硬件構成的邏輯系統中表決器是由開關電路實現的,而軟件中表決需要通過軟件斷言SA(Software Assertions)來實現。軟件斷言就是當軟件在宿主系統中運行時,對其進程或功能的正確與否做出判斷的條件。
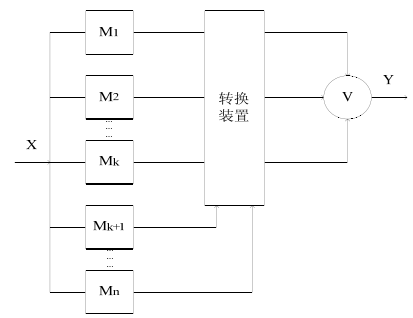
H(n,k)系統結構
3、智能容錯的實現方法
智能容錯的實現方法分為:(1)故障信號檢測;(2)故障特征識別;(3)故障狀態預測;(4)故障維修決策;(5)故障容錯控制。
故障容錯的目的在于針對不同的故障源和故障特征,采取相應的容錯處理措施,對故障進行補償、消除或自動修復,以保證設備繼續安全可靠運行,或以犧牲性能損失為代價,保證設備在規定時間內完成其基本功能。
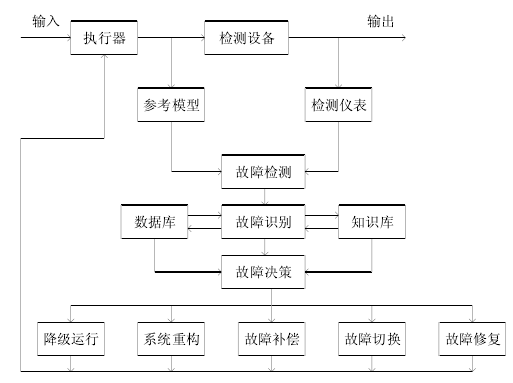
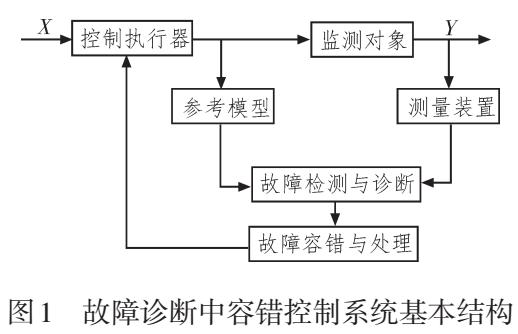
故障容錯控制過程框圖
冗余技術
高可靠性是過程控制系統的第一要求。為了達到高可靠性和低失效率相統一的目的,我們通常會在控制系統的設計和應用中采用冗余技術。合理的冗余設計將大大提高系統的可靠性,但是同時也增加了系統的復雜度和設計的難度,如何合理而有效的進行控制系統冗余設計,是值得研究的課題。
1、冗余技術概念
冗余技術就是增加多余的設備,以保證系統更加可靠、安全地工作。
冗余的分類方法多種多樣,按照在系統中所處的位置,冗余可分為元件級、部件級和系統級;按照冗余的程度可分為1:1冗余、1:2冗余、1:n冗余等多種。
在當前元器件可靠性不斷提高的情況下,和其它形式的冗余方式相比,1:1的部件級熱冗余是一種有效而又相對簡單、配置靈活的冗余技術實現方式,如I/O卡件冗余、電源冗余、主控制器冗余等。
因此,目前國內外主流的過程控制系統中大多采用了這種方式。當然,在某些局部設計中也有采用元件級或多種冗余方式組合的成功范例。
2、控制系統冗余的關鍵技術
冗余是一種高級的可靠性設計技術。1:1熱冗余也就是所謂的雙重化,是其中一種有效的冗余方式,但它并不是兩個部件簡單的并聯運行,而是需要硬件、軟件、通訊等協同工作來實現。將互為冗余的兩個部件構成一個有機的整體,通常包括以下多個技術要點:
1)信息同步技術
它是工作、備用部件之間實現無擾動(Bumpless)切換技術的前提,只有按控制實時性要求進行高速有效的信息同步,保證工作、備用部件步調一致地工作,才能實現冗余部件之間的無擾動切換。
在熱備用工作方式下,其中一塊處于工作狀態(工作卡),實現系統的數據采集、運算、控制輸出、網絡通訊等功能;而另一塊處于備用狀態(備用卡),它實時跟蹤工作卡的內部控制狀態(即狀態同步)。工作/備用卡件之間的正/負邏輯是互斥的,即一個為工作卡,另一個必定是備用卡;而且它們之間有冗余控制電路(又稱工作/備用控制電路)和信息通訊電路,以協調兩塊卡件同時而且有序地運行,保證對外輸入輸出特性的同一性,即對于用戶使用而言,可以認為只有一個部件。一般在設計中,工作、備用部件之間通過高速的冗余通訊通道(串行或并行)實現運行狀態互檢和控制狀態的同步(如組態信息、輸出閥位、控制參數等)。
2)故障檢測技術
為了保證系統在出現故障時及時將冗余部分投入工作,必須有高精確的在線故障檢測技術,實現故障發現、故障定位、故障隔離和故障報警。故障檢測包括電源、微處理器、數據通訊鏈路、數據總線及I/O狀態等。其中故障診斷包括故障自診斷和故障互檢(工作、備用卡件之間的相互檢查)
3)故障仲裁技術和切換技術
精確及時地發現故障后,還需要及時確定故障的部位、分析故障的嚴重性,依賴前文提到的冗余控制電路,對工作、備用故障狀態進行分析、比較和仲裁,以判定是否需要進行工作/備用之間的狀態切換。控制權切換到冗余備用部件還必須保證快速、安全、無擾動。當處于工作狀態的部件出現故障(斷電、復位、軟件故障、硬件故障等)或者工作部件的故障較備用部件嚴重時,備用部件必須快速地無擾動地接替工作部件的所有控制任務,對現場控制不造成任何影響。同時要求切換時間應為毫秒級,甚至是微秒級,這樣就不會因為該部件的故障而造成外部控制對象的失控或檢測信息失效等等。另外,還需要盡快通過網絡通訊或就地LED顯示進行報警,通知用戶出現故障的部件和故障情況,以便進行及時維護。
4)熱插拔技術
為了保證容錯系統具有高可靠性,必須盡量減少系統的平均修復時間MTBR。要做到這一點,在設計上應努力提高單元的獨立性、可修復性、故障可維護性。實現故障部件的在線維護和更換也是冗余技術的重要組成部分,它是實現控制系統故障部件快速修復技術的關鍵。部件的熱插拔功能可以在不中斷系統正常控制功能的情況下增加或更換組件,使系統平穩地運行。
5)故障隔離技術
冗余設計時,必須考慮工作、備用部件之間的故障應該做到盡可能互不影響或影響的概率相當小(0.01%),即可認為故障是隔離的。這樣可以保證:處于備用狀態的部件發生故障時,不會影響冗余工作部件或其他關聯部件的正常運行,保證冗余的有效性。
隨著工業自動化的飛速發展,工業部門對生產設備及控制系統的可靠性也提出了越來越高的要求。冗余技術提高了控制系統可靠性,滿足了特殊工業部門的應用需求。
審核編輯:湯梓紅
-
控制系統
+關注
關注
41文章
6546瀏覽量
110475 -
計算機
+關注
關注
19文章
7419瀏覽量
87712 -
人工智能
+關注
關注
1791文章
46846瀏覽量
237537 -
冗余技術
+關注
關注
0文章
15瀏覽量
11106
原文標題:容錯控制的冗余技術
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【視頻】智能家居系統關鍵技術分析與應用
智能穿戴產業的五大關鍵技術
什么是三模冗余容錯技術?
實現物聯網與智能電網集成的關鍵技術
DCS控制系統模件冗余電源的實現
基于PLC的泥沙輸送冗余控制系統





 工商網監
工商網監
評論