") 磁鐵的激勵(lì)方式及磁編產(chǎn)品簡(jiǎn)介
磁鐵的激勵(lì)方式及磁編產(chǎn)品簡(jiǎn)介
磁鐵激勵(lì)的方法
在位置感測(cè)應(yīng)用中有許多應(yīng)用霍爾效應(yīng)的方法下面介紹最為普遍的方法。
正面
對(duì)于“正面”激勵(lì)應(yīng)該有足夠的磁鐵行程以至少提供傳感器最大工作和最小釋放特性時(shí)10%磁通量的過(guò)激勵(lì)目標(biāo)對(duì)準(zhǔn)在最大靈敏度該點(diǎn)上“正面”移至傳感器然后向后退。
單極正面
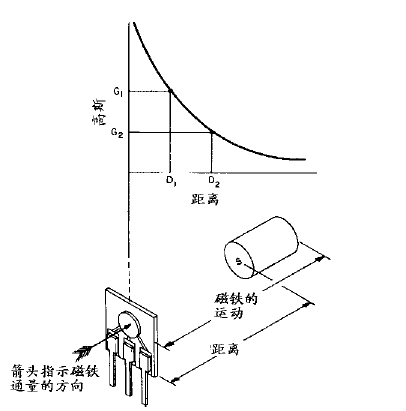
MT單極開(kāi)關(guān)產(chǎn)品與磁鐵移動(dòng)方式
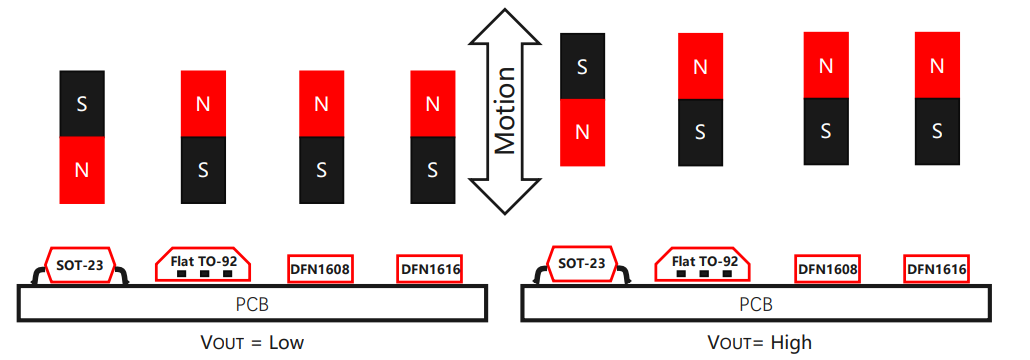
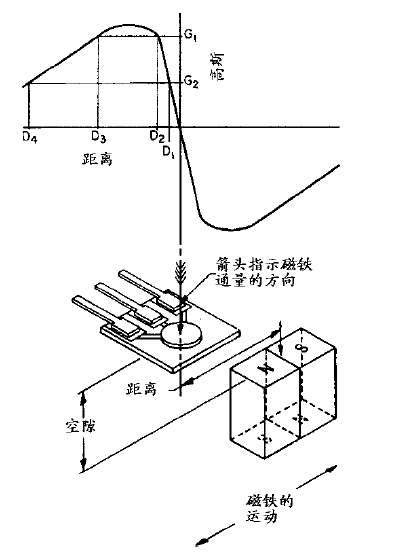
滑過(guò)
對(duì)于“滑過(guò)”激勵(lì)磁鐵應(yīng)通過(guò)感測(cè)表面一段距離以至少提供超過(guò)最大工作特性時(shí)10%磁通量的過(guò)激勵(lì)目標(biāo)以指定的距離移過(guò)傳感器表面。
單極滑過(guò)
HMC1501/HMC1512磁鐵移動(dòng)方式
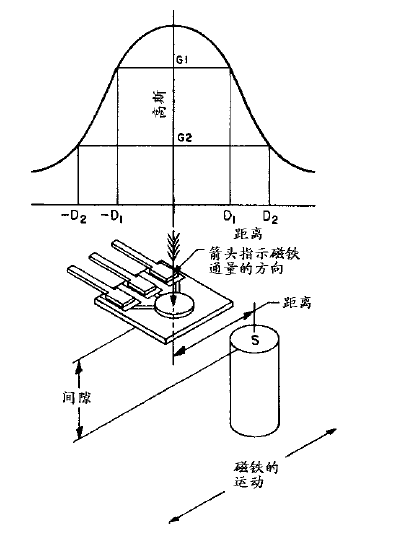
雙極滑過(guò)
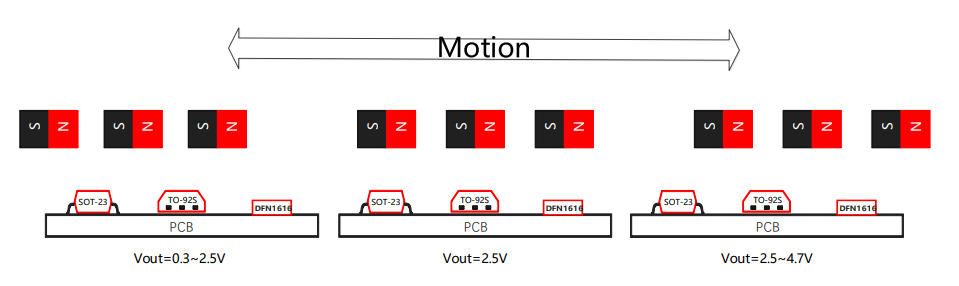
MT910X線性與磁鐵相對(duì)移動(dòng)位置
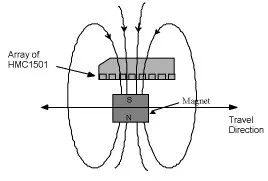
旋轉(zhuǎn)
一個(gè)旋轉(zhuǎn)的目標(biāo)如一個(gè)環(huán)形磁鐵可以提供通/斷交替的激勵(lì)方式。
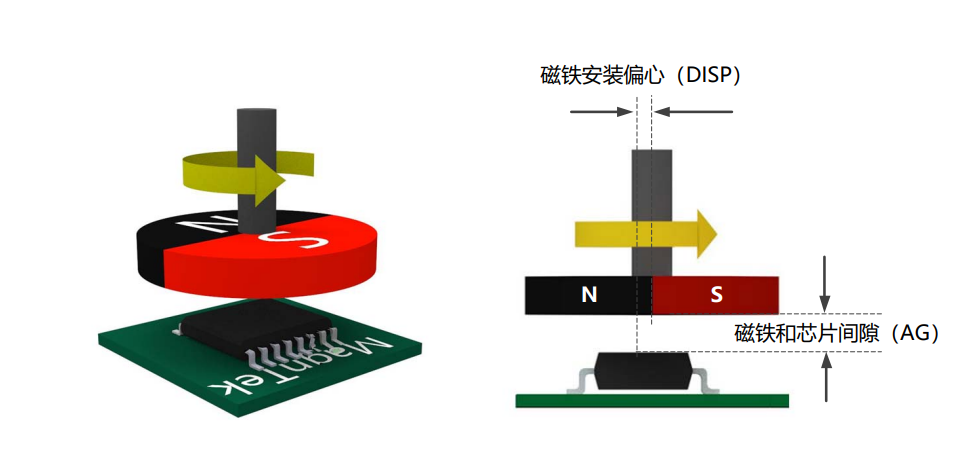
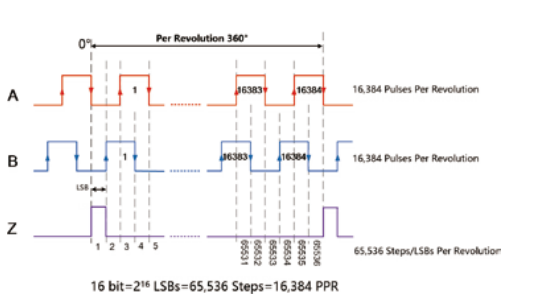
MT6835
MT6835高速磁性角度編碼IC
基于先進(jìn)的AMR各向異性磁阻技術(shù),0~360°絕對(duì)角度位置檢測(cè);
21位核心角度分辨率,支持最高120,000轉(zhuǎn)/分鐘的轉(zhuǎn)速;
角度輸出延時(shí)2微秒~10微秒;
提供客戶端自動(dòng)非線性校準(zhǔn)模式,無(wú)數(shù)據(jù)交互自動(dòng)計(jì)算補(bǔ)償,實(shí)現(xiàn)<土0.07°的INL;
-40~125°C 溫度范圍內(nèi)均可工作;
可同時(shí)支持增量ABZ、增量UVW、PWM絕對(duì)值和4線SPI總線輸出;
增量ABZ輸出支持1~16,384脈沖/圈,任意整數(shù)分辨率客戶可編程;
增量UVW輸出支持1對(duì)極~16對(duì)極任意整數(shù)對(duì)極客戶可編程;
內(nèi)置3.3V~5.0V 均可編程的EEPROM;
應(yīng)用
絕對(duì)角度位置傳感器;
伺服電機(jī)控制;
閉環(huán)步進(jìn)電機(jī)控制;
-
傳感器
+關(guān)注
關(guān)注
2548文章
50698瀏覽量
752037 -
EEPROM
+關(guān)注
關(guān)注
9文章
1010瀏覽量
81409 -
SPI總線
+關(guān)注
關(guān)注
4文章
103瀏覽量
27574 -
霍爾效應(yīng)
+關(guān)注
關(guān)注
4文章
448瀏覽量
43098 -
磁編碼器
+關(guān)注
關(guān)注
0文章
51瀏覽量
6149
原文標(biāo)題:霍爾效應(yīng)中--磁鐵的激勵(lì)方式及磁編產(chǎn)品簡(jiǎn)介
文章出處:【微信號(hào):NavigationHK,微信公眾號(hào):深圳航緯】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
變頻串聯(lián)諧振耐壓裝置產(chǎn)品簡(jiǎn)介
ZDS2024 Plus示波器產(chǎn)品簡(jiǎn)介
高精度數(shù)字功率計(jì)產(chǎn)品簡(jiǎn)介
UltraScale架構(gòu)和產(chǎn)品簡(jiǎn)介

FPC產(chǎn)品簡(jiǎn)介及設(shè)計(jì)規(guī)范.zip
數(shù)字隔離器產(chǎn)品簡(jiǎn)介






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論