 六軸位移臺參數解讀
六軸位移臺參數解讀
六足運動平臺在運動控制領域有著悠久的應用歷史,但近年來,傳統的6自由度(6-DOF)定位設備在面對行業對更高精度、更高可重復性和更好的幾何性能的需求時顯得有些不足。現對一些ALIO位移臺參數細節做一些解讀,以便您理解ALIO六自由度位移臺對于傳統六足位移臺的提升。
準確度(accuracy)
準確度是指在特定三維空間中,實際位置與通過測量設備測量的位置之間的差異。對于測量設備而言,準確度受到反饋機制(如ALIO六軸位移臺的光柵尺增量編碼器)、驅動機構(如滾珠螺桿、導桿、線性電機)以及軸承路徑的準確性的影響。
重復度(Repeatability)
可重復性被定義為在相同條件下,系統重復地被命令到同一位置時所達到的位置范圍。單向可重復性通過從一個方向接近該點進行測量。雙向可重復性是測量系統能夠從兩個方向返回到該點的能力。
分辨率(Resolution)
分辨率被定義為系統的最小可識別位移量。也分辨率由反饋裝置確定。
最小步長
(Minimum Incremental Step Size)
被定義為系統的最小可行移動量,也被稱為步進大小。
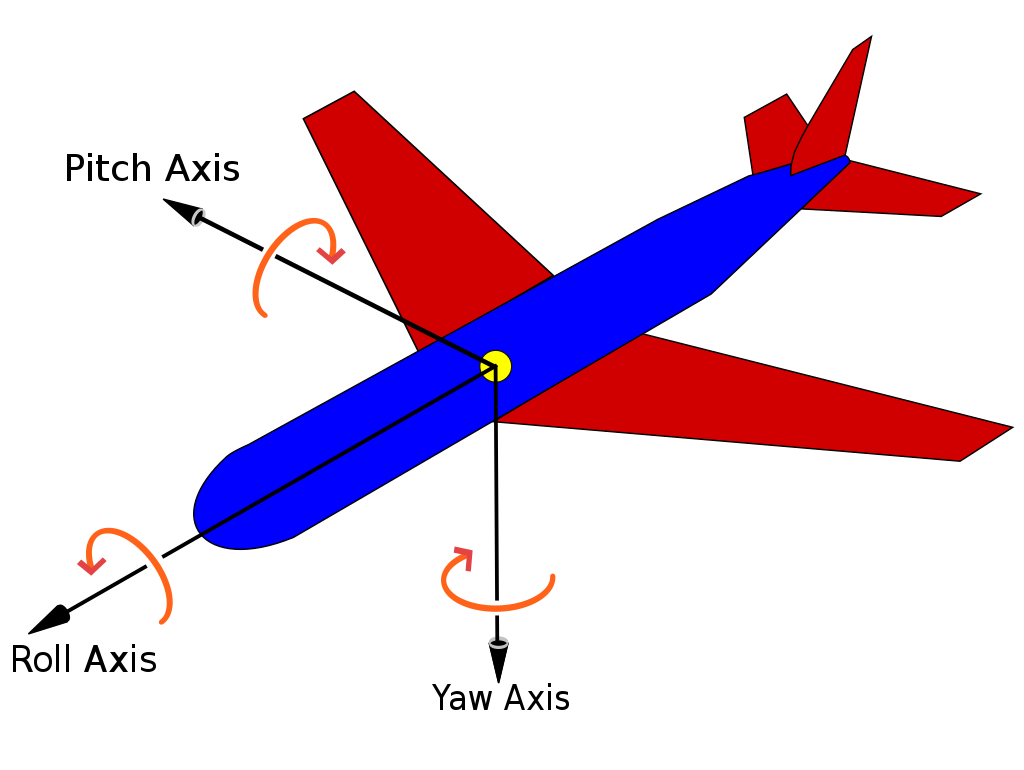
俯仰(Pitch)
被定義為系統的最小可行移動量,也被稱為步進大小。
俯仰是圍繞水平平面上與行進方向垂直的軸的旋轉。如果所測量的感興趣位置不位于旋轉中心,則俯仰旋轉會引起兩個維度上的阿貝誤差。對于X軸,俯仰旋轉會在X方向和Z方向上引起阿貝誤差。對于Y軸,俯仰旋轉會在Y方向和Z方向上引起阿貝誤差。這些誤差的大小可以通過將偏移距離的長度乘以旋轉角度的正弦值和1減旋轉角度的余弦值來確定。
橫滾(Roll)
橫滾是圍繞與行進方向平行的水平平面上的軸進行的旋轉。如果所測量的感興趣位置不位于旋轉中心,則橫滾旋轉會引起兩個維度上的阿貝誤差。對于X軸,橫滾旋轉會在Y方向和Z方向上引起阿貝誤差。對于Y軸,橫滾旋轉會在X方向和Z方向上引起阿貝誤差。這些誤差的大小可以通過將偏移距離的長度乘以旋轉角度的正弦值和余弦值來計算。
偏航(Yaw)
偏航是圍繞與行進方向垂直的垂直平面上的軸進行的旋轉,即Z軸。如果所測量的感興趣位置不位于旋轉中心,則偏航旋轉會引起兩個維度上的阿貝誤差。對于X軸或Y軸臺。
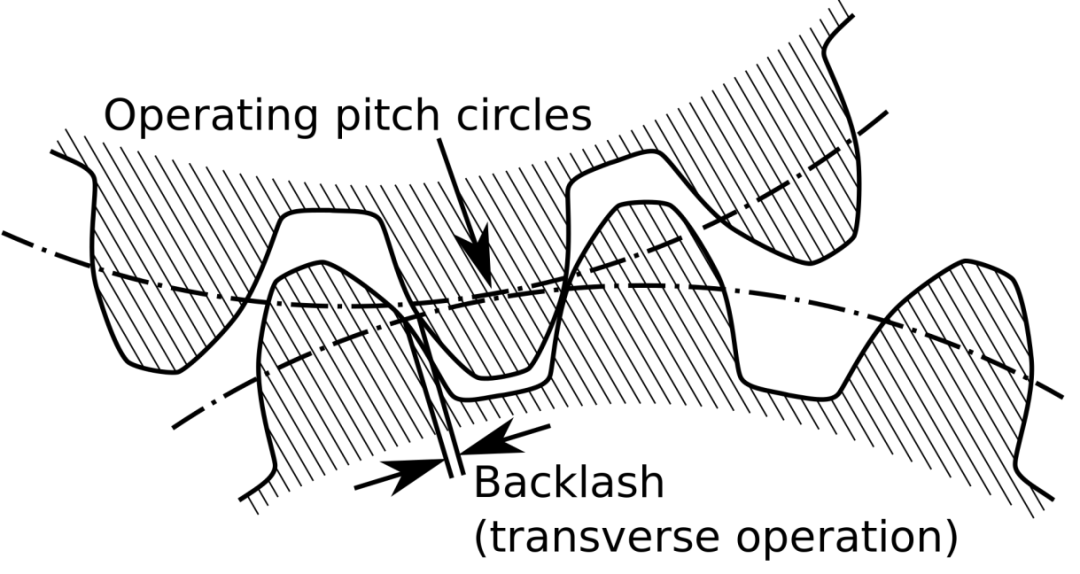
回程誤差(Backlash)
回程誤差是由行進方向反轉引起的定位誤差。反向間隙是在行進方向反轉時不會產生位置變化的指令運動部分。反向間隙是由傳動系中元素之間的間隙引起的。隨著間隙的增加,產生運動所需的輸入量也會增加。間隙的增加導致反向間隙誤差增加。反向間隙也會影響雙向可重復性。ALIO位移臺從系統設計上避免萬向節消除了回程誤差,大大提升位移臺整體性能。
直線度(Straightness)
直線度是指在水平平面上,相對于行進方向的真實行進線路的偏差。平整度是指在垂直方向上,相對于行進方向的真實行進線路的偏差。對于ALIO位移臺,直線度和平整度參數都與位移臺的安裝表面有關,請聯系昊量光電了解詳情。
跳動(runout)
跳動是旋轉機械系統的不準確性,特別是工具或軸沒有完全與主軸線一致地旋轉。例如;鉆孔時,由于鉆頭偏心旋轉(離軸而不是成一直線),跳動會導致孔大于鉆頭的標稱直徑。對于軸承,跳動會導致機器振動并增加軸承負載。
跳動有兩種主要形式:
徑向跳動(Radial runout):由于工具在平行于機器軸線的情況下發生平移,徑向跳動沿機器軸線的各個點測量結果相同。
軸向跳動(Axial runout):由于工具或零件與軸線有角度,導致工具(或軸)尖端相對于基準位置偏離中心旋轉。軸向跳動的大小取決于測量點與基準位置的距離。
ALIO的6-D 納米精度工作臺的核心是串聯和平行運動學的結合,這使得傳統的六足運動學過時了,在精度、路徑性能、速度、剛度和更大的工作范圍(幾乎無限的XY行程,完全可編程的工具中心點位置)方面都有數量級的改進。
ALIO的Hybrid Hexapod具有小于100納米的3維6軸點精度重復性,使其成為激光加工、光學檢測、光電子、半導體、計量和醫療設備領域以及所有微加工項目的關鍵任務應用的關鍵技術。
-
設備
+關注
關注
2文章
4480瀏覽量
70548 -
運動控制
+關注
關注
4文章
567瀏覽量
32828 -
測量
+關注
關注
10文章
4781瀏覽量
111146
發布評論請先 登錄
相關推薦
焊接機器人六個軸分別是什么作用


如何正確操作六軸焊接機器人
京瓷雙軸位移壓電元件的特征優勢和應用案例
高精度六軸MEMS運動跟蹤TM器件ICM-42688-P 數據表
深入了解六軸力傳感器:原理、分類與應用
六軸姿態傾角動態傳感器
六軸焊接機器人多久檢修一次
六軸焊接機器人的操作流程

DC電源模塊的關鍵參數解讀






 工商網監
工商網監
評論