") 直驅(qū)電機(jī)選型與應(yīng)用指南(二)
直驅(qū)電機(jī)選型與應(yīng)用指南(二)
6、皮帶剛性
在基于皮帶的傳輸中,伺服聯(lián)軸器將輸出皮帶輪連接到旋轉(zhuǎn)負(fù)載。負(fù)載的重量由環(huán)形軸承支撐。皮帶和皮帶輪的比例,實(shí)際上被限制在 3:1 左右,如果超過(guò)該比例,皮帶的角度會(huì)導(dǎo)致與驅(qū)動(dòng)皮帶的皮帶輪的表面接觸過(guò)少。嘗試多級(jí)皮帶輪或過(guò)長(zhǎng)的皮帶來(lái)改善這種情況通常不切實(shí)際。相反,伺服電機(jī)通常尺寸較大,以達(dá)到低速應(yīng)用所需的扭矩。在圖 7中,隨著電機(jī)開(kāi)始轉(zhuǎn)動(dòng),皮帶首先根據(jù)其彈簧常數(shù)偏擺。然后在負(fù)載最終移動(dòng)之前,聯(lián)軸器也會(huì)偏擺。電機(jī)聯(lián)軸器、負(fù)載聯(lián)軸器和長(zhǎng)機(jī)器軸也會(huì)導(dǎo)致剛性損失。
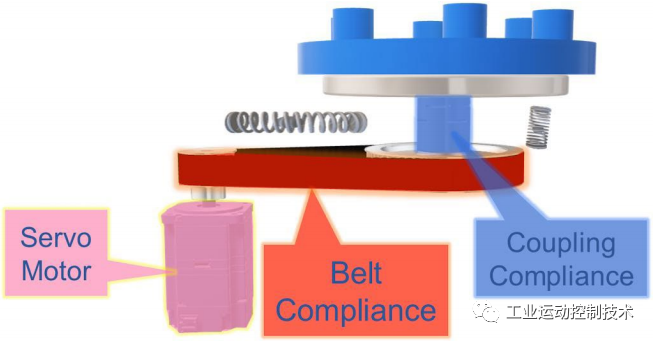
▲隨著電機(jī)開(kāi)始轉(zhuǎn)動(dòng),皮帶首先根據(jù)其彈簧常數(shù)偏擺。然后在負(fù)載最終移動(dòng)之前,聯(lián)軸器也會(huì)偏擺。
7、齒輪剛性
對(duì)于齒輪驅(qū)動(dòng)的變速器,伺服聯(lián)軸器將齒輪箱輸出連接到旋轉(zhuǎn)負(fù)載。負(fù)載的重量再次由環(huán)形軸承支撐。行星齒輪箱和多級(jí)齒輪箱通常是低間隙和高剛性應(yīng)用的首選。
齒輪箱的剛性比皮帶高得多,但原理相同。電機(jī)拖動(dòng)輸入齒輪,該齒輪偏擺,從而帶動(dòng)輸出齒輪,該輸出齒輪也發(fā)生一定程度的偏擺。與負(fù)載的耦合可能偏擺最大。
▲電機(jī)聯(lián)軸器、負(fù)載聯(lián)軸器和長(zhǎng)機(jī)器軸也會(huì)導(dǎo)致剛性損失。
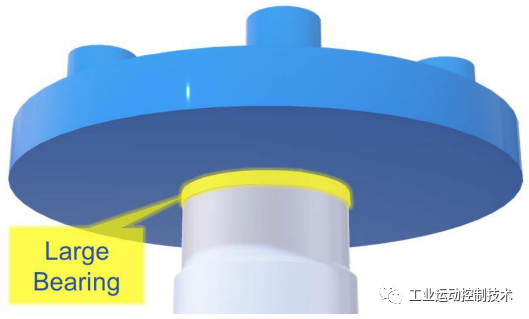
8、直驅(qū)剛性
直接驅(qū)動(dòng)電機(jī)繞過(guò)所有傳輸組件及其柔性以及相關(guān)的諧振頻率。直接驅(qū)動(dòng)電機(jī)通常配置非常大的軸承,以增加軸向和徑向負(fù)載能力。這并不是說(shuō)沒(méi)有諧振。
諧振頻率仍然可以由負(fù)載本身產(chǎn)生,或者通過(guò)電機(jī)和負(fù)載之間的任何安裝板或延伸部分產(chǎn)生。電機(jī)的定子和機(jī)架之間甚至?xí)a(chǎn)生共振,就像在基于傳輸?shù)南到y(tǒng)中發(fā)現(xiàn)的那樣。但是直接驅(qū)動(dòng)系統(tǒng)的高剛性,會(huì)導(dǎo)致超出運(yùn)行系統(tǒng)允許的高諧振頻率。
9、負(fù)載慣量和加轉(zhuǎn)速度
諧振頻率也是負(fù)載慣量和電機(jī)慣量的函數(shù)。在關(guān)鍵性能指標(biāo)中,這被稱為負(fù)載與電機(jī)慣量比。伺服系統(tǒng)的負(fù)載與電機(jī)慣量比通常小于10:1,以便通過(guò)彈性聯(lián)軸器對(duì)電機(jī)的負(fù)載進(jìn)行可接受的控制。
直接驅(qū)動(dòng)應(yīng)用不使用彈性聯(lián)軸器,因此可以支持更高的慣量比。盡管如此,負(fù)載慣量對(duì)于直接驅(qū)動(dòng)電機(jī)來(lái)說(shuō)還是很重要的,因?yàn)楦鶕?jù)牛頓第二定律,它會(huì)限制加速度和減速度,還會(huì)影響軸承壽命。直接驅(qū)動(dòng)電機(jī)的低摩擦意味著幾乎所有停止移動(dòng)負(fù)載的動(dòng)力,都必須由電子驅(qū)動(dòng)系統(tǒng)提供,這也會(huì)限制最大負(fù)載。
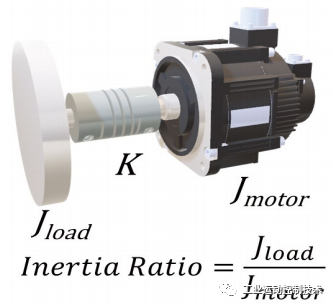
▲直接驅(qū)動(dòng)電機(jī)的低摩擦意味著幾乎所有停止移動(dòng)負(fù)載的動(dòng)力,都必須由電子驅(qū)動(dòng)系統(tǒng)提供,這也會(huì)限制最大負(fù)載。
10、間隙和旋轉(zhuǎn)驅(qū)動(dòng)變速器
旋轉(zhuǎn)驅(qū)動(dòng)變速器的性能受到間隙的影響。當(dāng)機(jī)構(gòu)反轉(zhuǎn)時(shí),會(huì)造成空轉(zhuǎn)。齒輪箱在驅(qū)動(dòng)鏈輪和輸出鏈輪之間,有一定的間隙。對(duì)于皮帶系統(tǒng),間隙發(fā)生在皮帶和皮帶輪的齒之間。
制造商已經(jīng)開(kāi)發(fā)出方法來(lái)減少驅(qū)動(dòng)傳輸中的間隙,并在控制系統(tǒng)中對(duì)其進(jìn)行電子補(bǔ)償。但總會(huì)有一定程度的間隙,而且隨著傳輸機(jī)構(gòu)的磨損,它往往會(huì)變得更糟。結(jié)果是,負(fù)載的位置不能完全由電機(jī)編碼器的位置確定。并且由于在反轉(zhuǎn)時(shí)負(fù)載會(huì)在短時(shí)間內(nèi)與電機(jī)斷開(kāi)連接,它還可能導(dǎo)致調(diào)諧不穩(wěn)定和噪聲運(yùn)營(yíng)。
。
由于在反轉(zhuǎn)時(shí),負(fù)載會(huì)在短時(shí)間內(nèi)與電機(jī)斷開(kāi)連接,間隙會(huì)導(dǎo)致調(diào)諧不穩(wěn)定和噪聲運(yùn)行。直接驅(qū)動(dòng)電機(jī)是唯一可以實(shí)現(xiàn)零間隙的旋轉(zhuǎn)驅(qū)動(dòng)機(jī)構(gòu)。由于電機(jī)與負(fù)載直接相連,因此電機(jī)編碼器測(cè)得的負(fù)載位置更接近負(fù)載本身。
11、位置穩(wěn)定時(shí)間
剛性、負(fù)載慣量、慣量比和間隙,都是使傳動(dòng)機(jī)構(gòu)位置穩(wěn)定時(shí)間惡化的關(guān)聯(lián)因素。位置穩(wěn)定時(shí)間,是指從指令動(dòng)作結(jié)束與機(jī)構(gòu)實(shí)際停止之間的延遲。減少這種延遲對(duì)于許多具有短程動(dòng)作的應(yīng)用尤其重要。等待機(jī)器停止,可能占到整個(gè)周期相當(dāng)大的一部分。
請(qǐng)記住,這些傳動(dòng)機(jī)構(gòu)的位置由旋轉(zhuǎn)伺服電機(jī)的編碼器測(cè)量。編碼器可以顯示負(fù)載以較短的時(shí)間穩(wěn)定下來(lái)。這意味著編碼器已停止移動(dòng)。負(fù)載可能仍在運(yùn)動(dòng)中,尚未穩(wěn)定或正經(jīng)歷振動(dòng)和振蕩。
傳輸系統(tǒng)的剛性和間隙會(huì)干擾通過(guò)編碼器測(cè)量的穩(wěn)定時(shí)間。然而,在直接驅(qū)動(dòng)電機(jī)中,編碼器本質(zhì)上是固定在負(fù)載本身上的,報(bào)告負(fù)載的真實(shí)穩(wěn)定時(shí)間。由于其高剛性和零間隙,通過(guò)良好的調(diào)整可以顯著減少直接驅(qū)動(dòng)電機(jī)的穩(wěn)定時(shí)間,同時(shí)還需要盡可能的減輕源自負(fù)載本身的振動(dòng)。
齒輪箱和皮帶可實(shí)現(xiàn)的穩(wěn)定時(shí)間,通常受到機(jī)械剛性和間隙水平的影響,齒輪箱的性能通常優(yōu)于皮帶。這些機(jī)構(gòu)的位置是通過(guò)旋轉(zhuǎn)伺服電機(jī)的編碼器測(cè)量的。
編碼器可能表示負(fù)載已以較短的建立時(shí)間穩(wěn)定,但它的真正含義是編碼器已停止移動(dòng)。負(fù)載可能仍在運(yùn)動(dòng)中但尚未穩(wěn)定,或者可能正在經(jīng)歷振動(dòng)。
傳動(dòng)裝置的剛性和間隙會(huì)干擾通過(guò)編碼器測(cè)量穩(wěn)定時(shí)間。在直接驅(qū)動(dòng)電機(jī)中,編碼器基本上是固定在負(fù)載本身上,用于報(bào)告負(fù)載的真實(shí)穩(wěn)定時(shí)間。
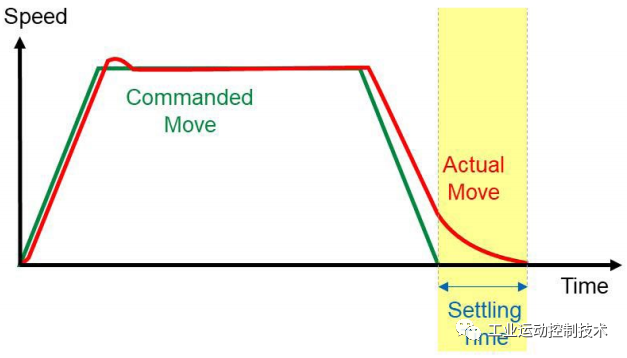
▲位置穩(wěn)定時(shí)間是移動(dòng)指令結(jié)束與機(jī)構(gòu)停止之間的延遲。減少延遲,對(duì)于許多具有短程動(dòng)作的應(yīng)用尤其重要。等待機(jī)器停止,可能占整個(gè)周期相當(dāng)大的一部分。
-
驅(qū)動(dòng)
+關(guān)注
關(guān)注
12文章
1769瀏覽量
84785 -
變速器
+關(guān)注
關(guān)注
5文章
309瀏覽量
34228 -
伺服
+關(guān)注
關(guān)注
16文章
634瀏覽量
40700 -
直驅(qū)電機(jī)
+關(guān)注
關(guān)注
1文章
39瀏覽量
3685
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
自動(dòng)化設(shè)備的伺服電機(jī)選型指南
bldc變頻電機(jī)和fpa直驅(qū)變頻電機(jī)區(qū)別
bldc電機(jī)和fpa直驅(qū)電機(jī)哪個(gè)好
bldc變頻電機(jī)是皮帶嗎 bldc電機(jī)是皮帶還是直驅(qū)
bldc變頻電機(jī)和直驅(qū)變頻電機(jī)區(qū)別與聯(lián)系是什么
減速電機(jī)選型指南
bldc變頻電機(jī)和直驅(qū)變頻電機(jī)區(qū)別
bldc變頻電機(jī)和直驅(qū)變頻電機(jī)區(qū)別
電機(jī)選型的詳細(xì)步驟
直驅(qū)技術(shù)為電機(jī)帶來(lái)了哪些特性?
全球最大18兆瓦直驅(qū)海上風(fēng)電機(jī)組下線
直驅(qū)電機(jī)的優(yōu)缺點(diǎn)

直驅(qū)電機(jī)選型與應(yīng)用指南(三)
直驅(qū)電機(jī)選型與應(yīng)用指南(一)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論