 拆了5款激光雷達后,我摸清了里面的元器件!
拆了5款激光雷達后,我摸清了里面的元器件!
一、發射端:國產激光芯片從VCSEL開始突破
在激光雷達中,發射端是價值量最高、壁壘最高的環節之一。在發射端中,隨著國內產業鏈崛起以及產業的整體技術路線調整,905nm VCSEL激光芯片等產品有望在市場實 現突破。此外,1550nm光源也具備獨特優勢,與主流的905nm形成錯位競爭,未來隨著FMCW測距路線的逐步發展,預計其份額還有進一步增長的空間。
光源:905nm走向VCSEL大勢所趨,1550nm實現錯位競爭
發射端的“心臟”就是光源。目前,決定光源技術路線的主要可以歸納為發光波長、激光器結構兩大指標。按照波長劃分,最主流的是905nm波長和1550nm波長。按照結構來劃分則主要分為EEL(邊發射激光器)、VCSEL(垂直腔面發射激光器),以及1550nm使用的光纖激光器。
光源的選擇制約因素主要有性能、成本、產業鏈成熟度、人眼安全四大要素。光源選擇完之后,需要解決光源校準、溫漂、無熱化三大問題。接下來我們將從一些重點關注的問題出發,分析不同技術路線的優劣勢與特點,以及對應產業鏈環節的壁壘和價值。
本節主要回答以下問題。1、為什么激光雷達會選擇在905nm和1550nm發光;2、905nm和1550nm各有什么優勢,各自的應用場景是什么?3、為什么歐司朗在905nmEEL的一家獨大的局面難以動搖;4、為什么905nm VCSEL會成為產業趨勢;5、為什么TEC在激光雷達里不再被需要;6、為什么激光器里需要加快慢軸準直。
1、為什么是905nm與1550nm?自然傳播窗口與產業鏈成熟度共同決定
首先,為何有905nm與1550nm兩條路線,而不是其他波長?這首先受到激光傳播窗口的限制。大氣吸收譜限制了哪些激光波長能夠在空氣中使用,比如300nm以下的短波會被臭氧吸收,1微米以上的紅外波長又經常會被水蒸氣吸收,所以激光器通常只能在 少數特定窗口工作,如下圖37白色背景部分(可以注意到很大一部分與可見光波長重合)。白色窗口中又有一大段是可見光,如果直接采用可見光又會對人眼產生視覺干擾,所以剩 余的傳播窗口是有限的。圖中四條紅線從左到右分別代表865nm、905nm、1310nm、1550nm波長,均處于白色窗口中,都能在空氣中正常工作。
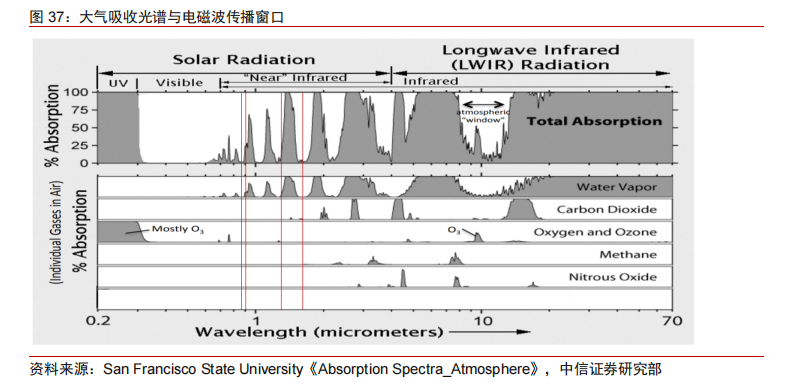
在以上諸多個傳播窗口中,為什么選擇了905nm與1550nm?這與現存的產業鏈成熟 度有關。1550nm光纖激光器是光通信領域應用最廣的光源之一,而905則與消費電子共用產業鏈(手機上的3D ToF傳感器通常使用940nm光源,與905基本屬于同種半導體激光器,可以共用GaAs材料體系),所以都有一定的發展基礎。
2、選擇905nm還是1550nm?允許的峰值功率高使得1550nm有探測優勢,材料體系使得905nm有成本優勢
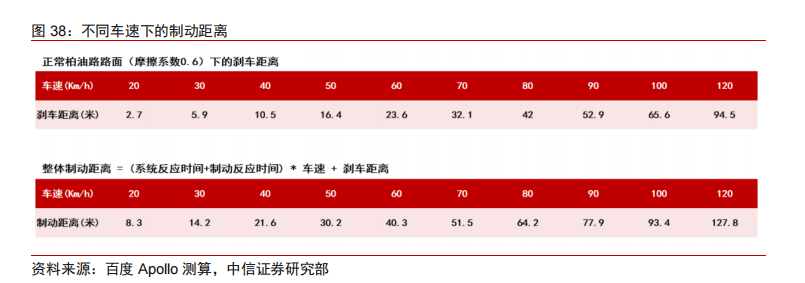
在905nm與1550nm光源中如何做選擇?主要還是取決于需求。激光雷達用戶對激 光雷達的首要需求就是看得遠(發光功率大)、看得清(分辨率高,激光器點頻高)。激光雷達需要看多遠?主要取決于制動距離。在通常的柏油路面上,120km/h條件下,制動距離接近130米,所以需要確保探測距離在制動距離之上,才能在高速場景下保障安全。
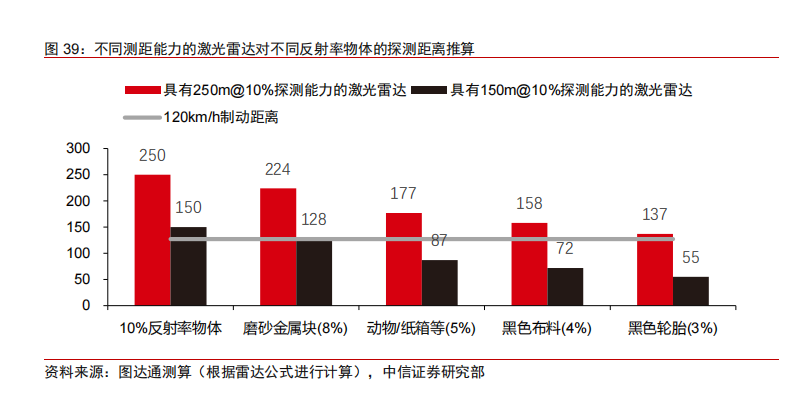
那么是否現有的905nm和1550nm激光雷達都能做到足夠長的探測距離?其實不然。1550nm激光器由于采用光纖能夠放大激光,因此其功率更大,幾毫瓦功率的種子光源經過光纖放大,瞬時發光功率可達1kW級別(905nm激光器則只有100W級別)。大功率帶來的好處是探測距離更遠,根據目前各家產品參數,1550nm激光雷達對10%反射率物體的探測距離通常能夠達到250m以上(905nm大多在150m@10%左右)。對10%反射率物體具備150m探測距離有些時候是不夠的,其原因在于有大量低反射率物體,比如動物毛皮、輪胎等,這些物體同樣會影響駕駛安全,但激光雷達對其探測距離往往會大幅縮減,在這種情況下,1550nm激光雷達會有更高的安全系數。
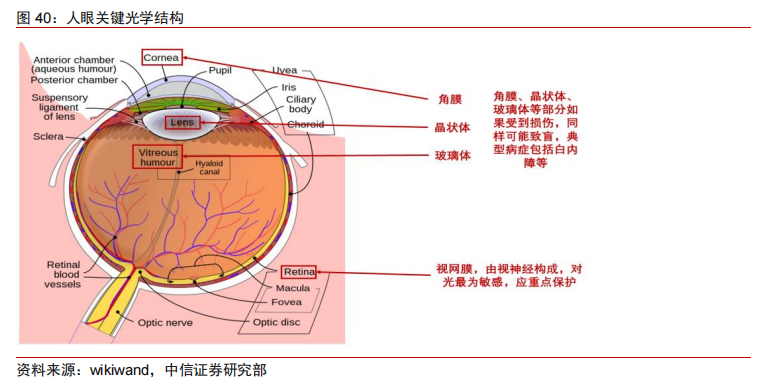
既然探測距離主要跟激光的功率有關,那么905nm激光雷達為什么不通過增加功率來提升探測距離呢,這里遇到的主要挑戰是人眼安全。所謂人眼安全就是激光雷達不能明顯加熱人的眼球結構,不能燒壞視網膜、晶狀體、玻璃體、角膜等重要的光學結構。視網膜是視神經的延伸,如果損壞將直接導致視力永久性損失。晶狀體、玻璃體等前部光學部件如果損壞,則可能導致白內障等病癥,同樣會導致視力嚴重損失。
而要保證不損傷人眼,需要滿足何種功率限制?這方面ANSI和IEC等權威組織已經有了較為明確的結論。由于紅外激光對人眼的損傷通常屬于加熱效應,因此需要保證激光 照射不導致明顯的溫升。由于發熱等于功率和時間的乘積,因此要滿足盡量不發熱,只需要激光照射的時間足夠短,或者連續照射功率足夠小即可。
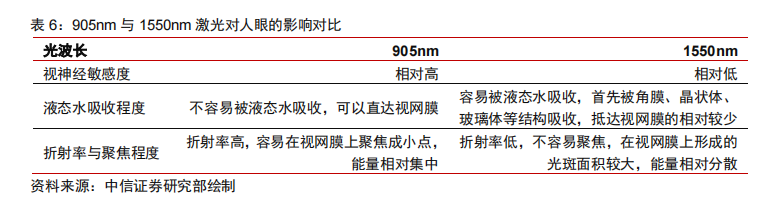
由于905nm更接近可見光,視網膜對其更敏感,同時液態水對其吸收也更少,因此這種光線更容易直達視網膜。相比而言,1550nm容易被水吸收,因此在抵達視網膜之前 已經被玻璃體等前部結構進行一輪吸收,抵達視網膜的較少。同時1550nm光折射率更大, 即便是抵達視網膜,也不容易聚焦成很小的光點,能量相對分散,進一步減小了損傷。
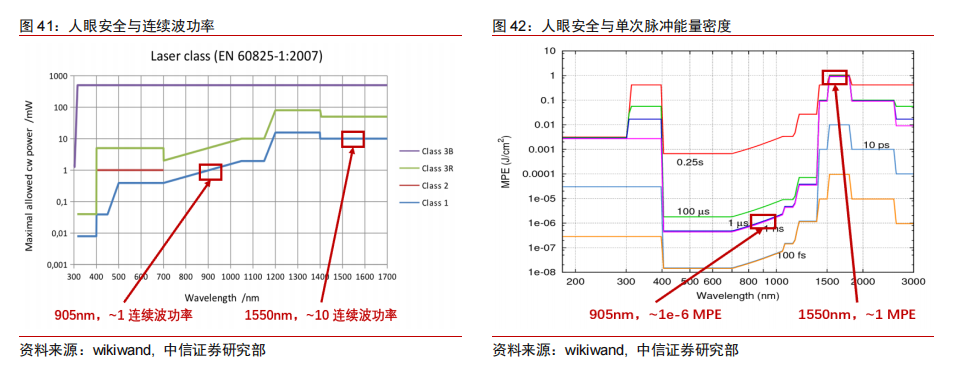
基于以上原因,在連續波情況下,1550nm激光的人眼安全功率達到905nm的10倍(如左下圖所示),如果是瞬間發光則倍數更多,如果發光控制在納秒級別(激光雷達通常一個脈沖只有幾個納秒),那么 1550nm激光人眼允許的強度可以更高。
所以,905nm激光功率不能再大幅增加的原因在于人眼安全,1550nm的探測距離優 勢將繼續保持。然而,1550nm激光器的短板是其成本更高。
905體系近紅外激光器發展較早,是基于GaAs材料體系的(其他近紅外激光器如 850/865nm、1064nm等也使用GaAs類材料),最早的LED(半導體發光二極管)、最早的半導體激光器都是基于GaAs開發的,可以說產業十分成熟,成本已經很低。
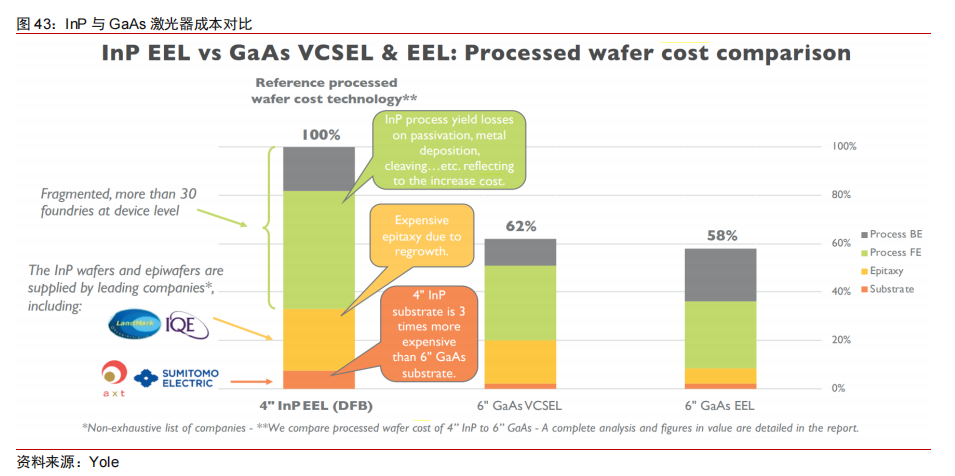
而另一條路線1550所使用的激光器種子光源材料為InGaAsP,需要基于InP體系開發,一方面其發展比GaAs要晚一些,另一方面In元素本身也更稀有,成本也更高。根據Chemical Book網站的數據,銦的地殼豐度只有百萬分之0.05,與銀相近,其稀有性決定 了其價格必然較高。Yole對InP EEL、GaAs VCSEL、GaAs EEL的成本進行了對比(由于反射效率、散熱效率等物理層面問題,InP體系目前沒有實用的VCSEL激光器)。
橙色部分顯示的是晶圓基片的成本,從中可見,雖然6寸晶圓的面積是4寸晶圓的2.25倍, 但是4寸的InP晶圓基片成本卻比6寸GaAs晶圓基片貴3倍多,如果換算成單位面積成本,那么差距就更大了。半導體激光器晶圓還需要在基片上進行外延生長(沉積上真正的發光材料等),這部分成本在圖中體現為黃色,InP晶圓的外延生長成本仍然明顯更高,比6寸GaAs EEL高了數倍。如果再考慮光纖成本,1550nm激光器成本就更高。
1550nm激光器的成本受到材料因素與激光器類型因素的限制,并非是通過大規模生產就能夠降低到905nm激光器同一水平的。
綜上所述,受到人眼限制,1550nm路線的探測距離優勢明顯,而受到材料限制,905nm路線的成本優勢也同樣明顯,因此二者構成錯位競爭。預計1550nm激光雷達將主要用于以安全性為核心賣點的車輛(如沃爾沃等)、價位和品牌定位較為高檔的車輛(如蔚來、奔馳、上汽飛凡R等)、重卡(剎車距離較長,奔馳重卡采用1550nm激光雷達)等特殊定位的車輛。其余車輛受限于成本,則更適合采用905nm激光雷達。
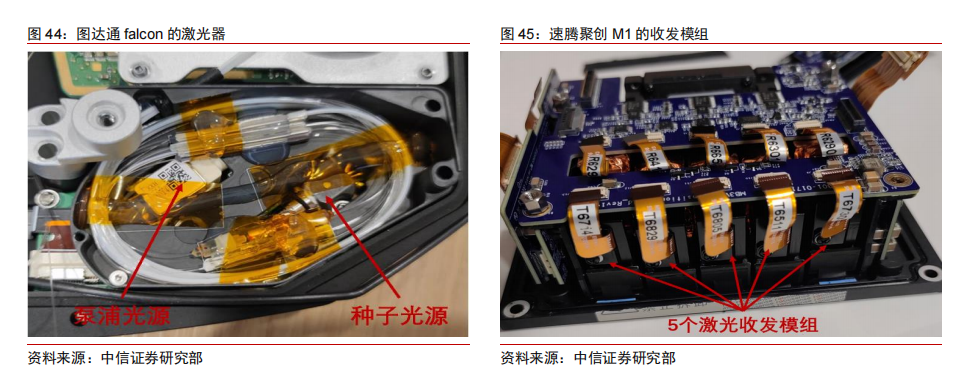
不過1550nm和905nm的功率特性也對其成本有所影響。通常1550路線的激光器較少,一般只需要一個光纖激光器(包含一個泵浦光源和一個種子光源),之后還可以對光纖中的激光進行分束,1個激光器就能同時打出多個光點,例如圖達通falcon采用1分4設計,1個激光器可同時產生4條光束進行掃描。而905nm路線的激光器由于功率有限,通常無法分束,需要的激光器數量更多,比如速騰M1就采用了5個收發模組同時發光,5個激光器同時發光進行掃描。禾賽AT128則配置更為豪華,直接采用128個VCSEL激光器來實現128線掃描。可以說1550nm激光的高功率特性在一定程度上縮小了與905的成本差距。
3、905nm EEL,歐司朗一家獨大局面暫難改變
905nm路線又分為EEL和VCSEL,目前全球和國內的905nm EEL的光芯片基本采用了歐司朗的光芯片。除了有先發優勢外,另一大原因就是歐司朗后來在低溫漂EEL上通過專利構筑了自己的優勢,而溫漂是激光雷達的一個很大的挑戰。
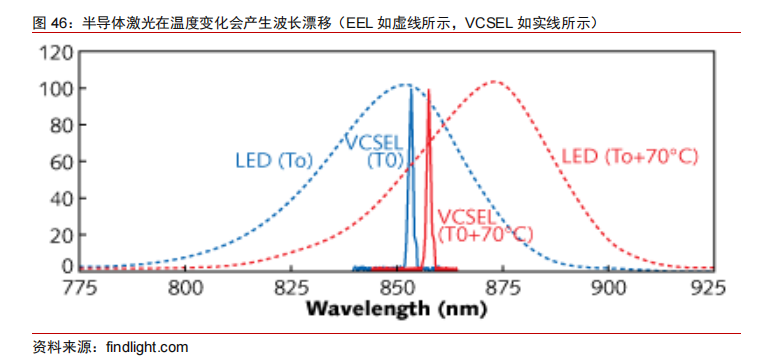
如上圖所示,EEL光芯片在溫度發生變化時光的波長會發生漂移,大約為0.3nm/C°由于汽車的工作溫寬特別寬(-45°~+85°),因此120度左右的溫寬范圍能造成高達40nm左右的溫漂,這給接收端帶來了巨大的挑戰,會影響激光雷達的探測距離和成像質量。
歐司朗實現低溫漂EEL的原理并不復雜,正如VCSEL實現低溫漂的關鍵在于上下兩層DBR反射鏡,歐司朗的低溫漂EEL其實也是利用了DBR。只不過VCSEL的DBR在上下兩面,而歐司朗將DBR放在了EEL激光器的側面(圖中130所標記的即為DBR), 與出光面上的鍍膜(圖中125)構成諧振腔,利用DBR實現了波長的精確篩選,從而實現低溫漂。
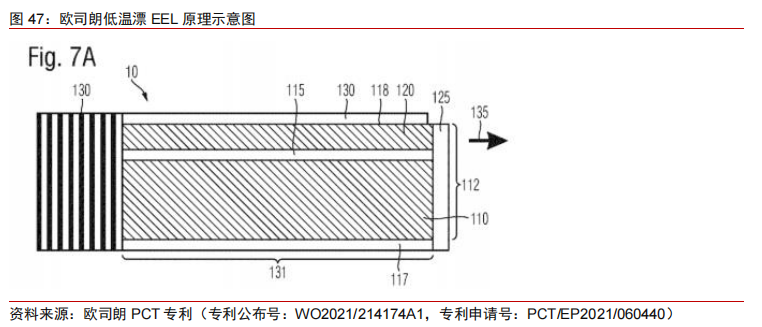
雖然低溫漂EEL原理上并不十分復雜,但由于歐司朗構筑了較強的專利壁壘,因此在EEL領域其市場地位較難動搖。
4、低成本,VCSEL取代EEL大勢所趨
雖然目前激光雷達領域的光源還是以EEL為主,但在905nm波長上,隨著多結工藝提升了發光功率,VCSEL替換EEL的趨勢越來越明顯,國內激光芯片企業迎來發展機遇。
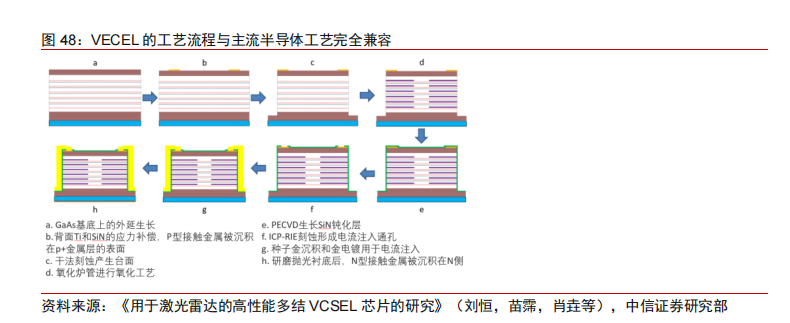
VCSEL取代EEL的首要原因是成本,由于VCSEL是上表面發光而不是側面發光, 不需要在側面進行太多加工,只需要按照正常的半導體加工工藝批量處理即可。而EEL是側面發光,所以在形成晶圓后還需要進行切割,分別對每個激光器的側表面進行處理、鍍膜,無法按照現有半導體工藝來一次性處理整個晶圓的激光器,成本較高。按照Yole的統計,EEL的后道處理工序成本比VCSEL高了一倍以上。如果再考慮給EEL增加DBR,就需要在EEL側面沉積多層晶體,成本會進一步提高。
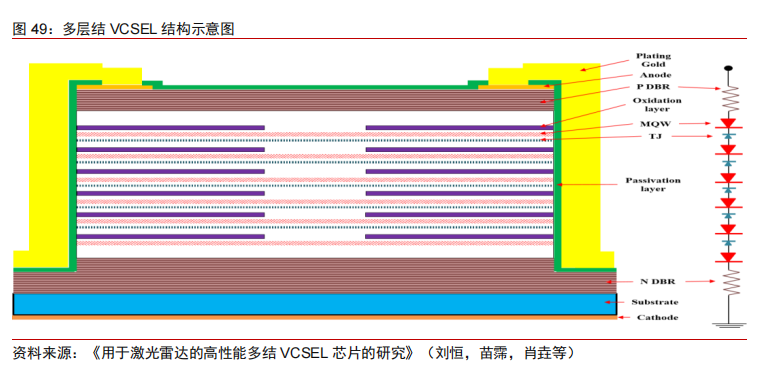
VCSEL取代EEL的第二大原因是因為過去VCSEL發光功率低的問題已經被新的“多結”工藝所解決。半導體激光器本質上作為一種二極管,也是PN結構成的,所謂多結就是多個PN結。在最初始的LED和激光二極管中,通常只用1個PN結進行發光。而隨后為了加大功率,人們開始將一個半導體激光器制作成多層PN結的結構,每一個PN結都能夠發光,這就大大增加了發光強度。根據劉恒等發布的《用于激光雷達的高性能多結VCSEL芯片的研究》,下圖49是一個6層結的VCSEL,圖中“MQW”所指向的區域就是發光層,總共有6個,相當于6個PN結,電流從上到下依次流經6個PN結,就能讓6個PN結同時發光,相當于6個串聯的激光二極管。我們用多層結的方式將多個激光器濃縮到一個激光器中,自然就提高了發光功率。也正是因為近年來結數的增多讓VCSEL的發光功率迅速增大,快速接近EEL。
此前由于VCSEL發展較晚,而且更多用于消費電子,對大功率沒有需求,所以此前的VCSEL大多都是單層結的,功率較小。而激光雷達的發展對大功率激光器提出了需求, 做出多層結的VCSEL并不存在原理上的困難,只是需要時間進行工藝開發,因此隨著近 年來VCSEL結數的不斷增加,最后一塊短板已經被補齊,在激光雷達領域替代EEL已經完全可行。
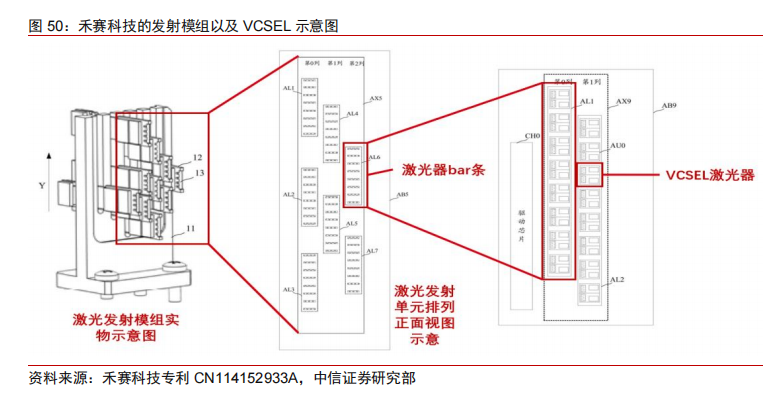
正因以上種種優勢,禾賽科技和華為等激光雷達廠商的方案紛紛走向VCSEL路線,比如禾賽科技在其專利《光發射模塊、光探測模塊、激光雷達及其測距方法》(專利申請公布號CN114152933A)中就主要使用了VCSEL芯片組成激光發射陣列。
我國激光產業鏈在大功率VCSEL方面與國外公司相比完全不落下風,長光華芯、縱慧芯光等公司在此領域具備強勁實力,值得關注。
5、為什么激光雷達里不需要加裝TEC
另一種解決溫漂的思路就是主動對激光器進行溫度調節,正如現在的新能源車往往會 對鋰電池進行熱管理。但這一思路更加凸顯了VCSEL路線的優越性。在需要維持光波長 精確的場合主動進行熱管理往往需要增加TEC(半導體制冷器,Thermo-Electric Cooler)。針對激光雷達進行冷卻,然而加裝單個TEC的功耗往往在2-3W的水平,多個激光器這一 功耗水平對于平均功耗只有十幾瓦水平的激光雷達來說是一個不小的負擔。此外,增加TEC本身也會帶來額外的成本開支,由于目前EEL激光器已經解決了溫漂問題,VCSEL激光器天然溫漂就比較小,因此與光模塊不同,在激光雷達里不再需要加裝TEC。
6、快慢軸準直:單激光器配備1-2個準直鏡,市場規模有望媲美手機鏡頭
發射端除了光源以外,另一類重要部件就是光學器件,其中最重要的一類就是用于對 激光器的光路進行校準的器件,在激光雷達整機中的價值量通常能夠達到10-20美金的水平,市場空間也較為廣闊。
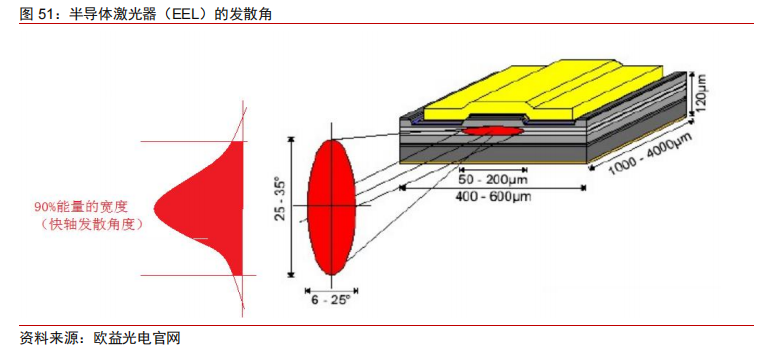
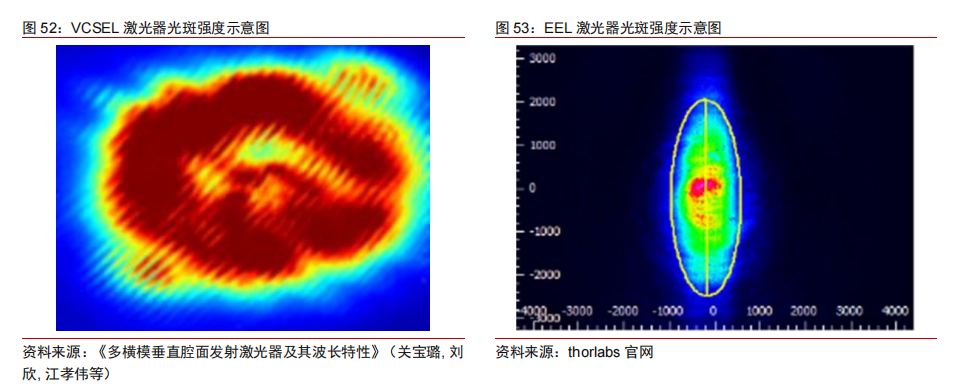
為什么需要對激光器發出的光進行校準?因為真實的激光并不是許多人想象當中的筆直的光束,而是存在著發散角的,尤其是半導體激光器,發散角非常大。由于半導體激光器體積小,諧振腔小,對光束的篩選作用比較弱,而且發光面積小,發出的光線會發生 衍射,所以對于EEL來說通常射出的都是橢圓錐形光束,如果對著墻面照射則會打出一個橢圓形光斑,其中橢圓形長軸通常稱為快軸,短軸通常稱為慢軸,快軸方向發散角可能達到25-50度左右,慢軸方向發散角也可能有十幾度到二十度。VCSEL激光器的光束也會呈現圓錐形發散,發散角可以達到20度左右。如果采取這樣的光束直接照射,則能量會很快分散殆盡,無法進行有效探測。
另外,半導體激光器由于諧振腔的篩選能力不夠強,還存在光束質量問題,也就是光 斑的強弱分布不均(存在多橫模),且在主要光斑周圍還有少量剩余能量(拖尾效應),所以有時也需要進行調整。針對拖尾問題,經常采用光闌將主光斑之外的少量光束舍棄。
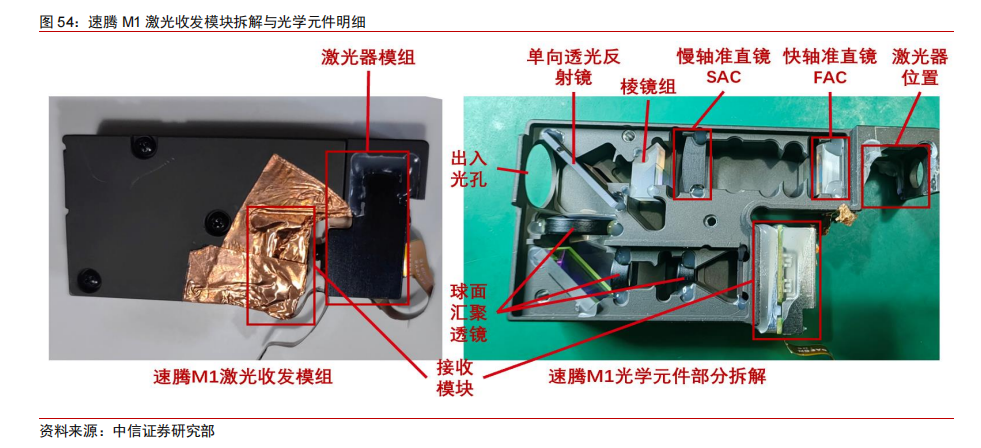
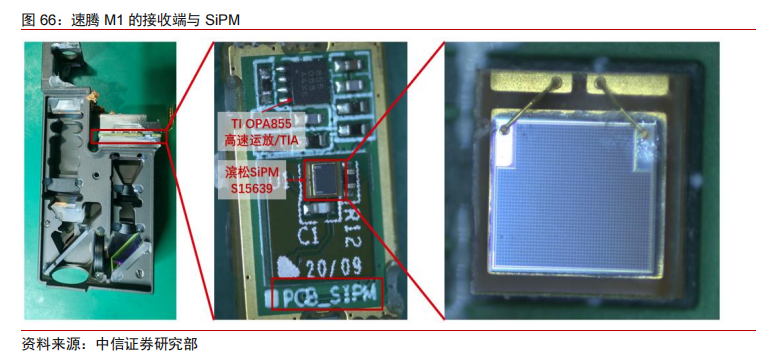
針對EEL激光器,通常需要在發光界面后立刻使用柱面透鏡進行快軸準直,如此可以用最小的透鏡面積節約成本,例如速騰M1是在每個激光器后緊跟一個快軸準直。在進行快軸準直后,通常會再進行一次慢軸準直。經過兩次準直后激光將具有較好的直線性。
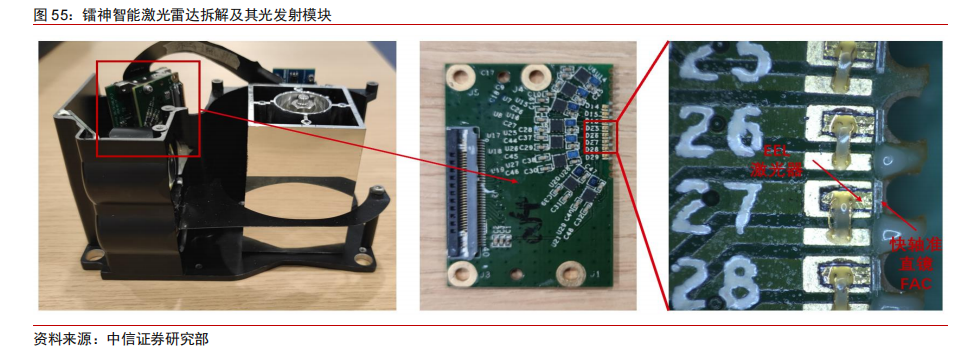
鐳神智能的一款激光雷達發射模組中采用8個EEL激光器,在每個激光器的出光口直接安裝1個快軸準直鏡,體積更小,僅有亞毫米尺度,肉眼基本無法直接分辨。
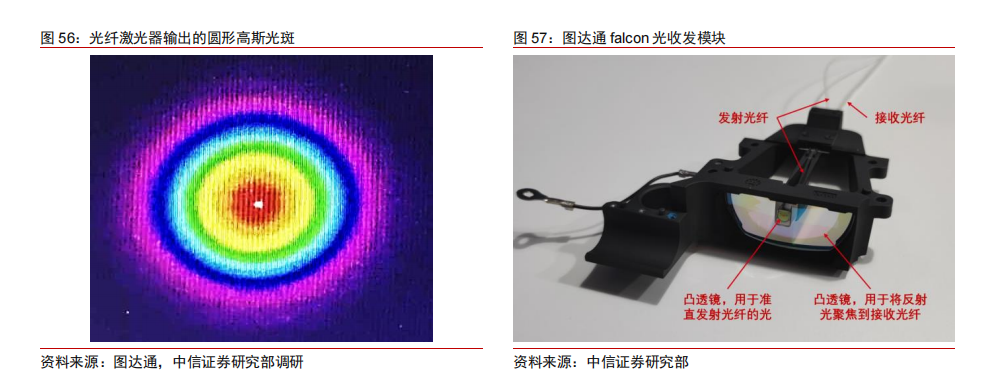
而針對光學校準,1550nm路線再次展現了其優勢。由于1550激光雷達使用光纖激光器,而光纖(通常使用單模光纖)本身就具有極強的光學校準能力,因此1550nm激光器的光束質量較高,輸出的幾乎是完美的圓形高斯光斑。同時其發散角也較小,根據武漢理工大學張睛等人的研究,圓光纖的發散角只有6度多,通常只需要在光纖后加一個普通的球面凸透鏡即可。
此外,對于絕大多數激光雷達,在接收光路上通常都需要用凸透鏡進行光線匯聚,將從目標處反射回來的平行光匯聚在接收器所在的較小面積上。對于部分短距離flash激光雷達,準直需求將變為光場強度均勻化以及光束視場角擴大的需求,因此會對光場勻化器、光束擴散器等光學元件產生需求。
隨著激光雷達行業發展,預計對光學器件的需求將穩定持續增長。快軸準直鏡將有較 大需求,此外慢軸準直鏡、快慢軸準直一體化透鏡、球面透鏡等也將有較多市場需求。未來若激光雷達達到較高滲透率,按照單車1前向2側向的配置,單臺激光雷達光學元件價值按照10美元計算,則全球市場規模有望超過百億人民幣,與手機鏡頭相近。
在光學校準元件方面,炬光科技、永新光學、藍特光學、福晶科技、騰景科技等一批 國內公司都分別在各自擅長的領域具備一定的實力。
散熱與無熱化設計:避免產生光路變化,保障激光器高點頻
發射端除了發光、校準光之外,還需要保障持續可靠工作,最主要的就是盡量避免發熱的影響。如果發熱得不到有效控制,則溫度上升,不僅會導致激光器溫漂,還會導致其他元件變形,對光路產生影響。由于功耗原因,通常不在激光雷達中進行主動降溫,因此就需要考慮散熱設計與無熱化設計。所謂無熱化,主要是指補償設計,當溫度發生改變,光學器件發生形變,但系統中不同部件的形變效果幾乎恰好抵消,使得光學系統的效果幾乎不受溫度影響。
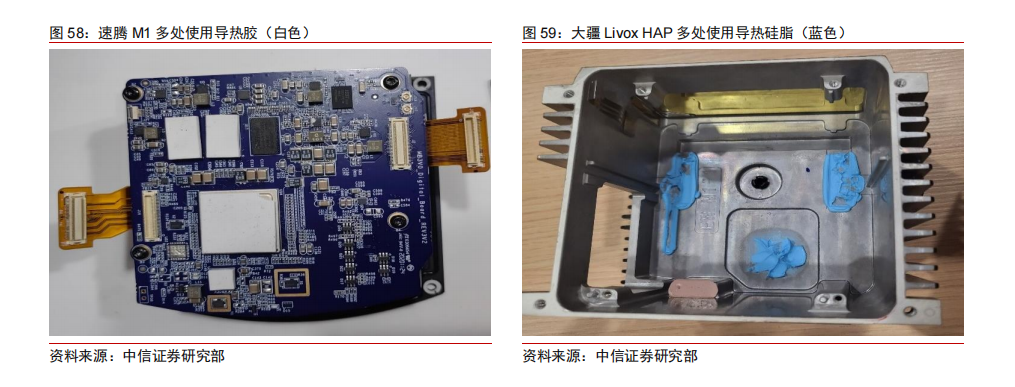
在激光雷達中,通常主要的發熱部件就是芯片和激光器,針對芯片,通常采用導熱膠或導熱硅脂等方式進行充分散熱,以免熱量影響自身以及其他部件工作。
實現良好的散熱對于提高激光器點頻具有重要意義,從而能夠打破幀率、分辨率、視野構成的不可能三角。針對大功率激光器主要是采用熱沉進行散熱,此處熱沉(heat sink)通常是指一些能夠持續吸收熱量或者將熱量傳導走而又保持溫度穩定的物體,在激光器當中通常指散熱材料。
無熱化的方法不盡相同,例如可以采取徑向折射率不同的材料制作透鏡來減弱溫度的影響,或者采用帶有記憶特性的材料來讓光學元件之間產生相對位移,從而抵消形變的影響等。
二、接收端:905nm走向SiPM,1550nm使用APD,PDE與可靠性是關鍵
目前激光雷達所用的接收端主要分APD、SPAD/SiPM兩大路線,這兩種路線其實同根同源,都是利用二極管的雪崩擊穿效應。
眾所周知,二極管具有單向導電性,在反方向幾乎不導電,除非施加較大的反向電壓, 直接強行讓二極管擊穿。雪崩擊穿就是二極管擊穿的一種,想象一塊從山頂滾落的石塊,如果其速度夠快,它就能夠撞碎沿途的樹木和其他石塊,并且這些碎塊將伴隨初始的石塊共同加速滾下山坡,在途中不斷造成更大的破壞,最終越來越多石塊將加入這一過程,造成巨大破壞,這一過程與雪崩極為類似。二極管的雪崩擊穿中,石塊換成了電子,強大的反向電壓導致少量電子高速運動,并將其他原子中的電子擊飛出來成為自由電子,這些自 由電子又將更多的電子擊飛成為自由電子,導致反向電流迅速擴大,二極管擊穿。
雪崩擊穿與光子探測的關系就在于,光子能夠激發電子使其成為自由電子,在合適的條件下能夠誘發雪崩擊穿。只需探測到二極管反向電流的突然增大,就意味著有光子存在。最初利用光子激發電子原理的是光電二極管PD(Photo-Diode),光子能夠增大反向電流,但無法導致擊穿,反向電流仍然很小,因此探測靈敏度不高。APD(Avalanche Photo-Diode, 雪崩光電二極管)其實就是光電二極管的升級版,直接給光電二極管加上反向電壓,這個反向電壓十分接近擊穿電壓,如此只需有少量光子就可以誘發雪崩擊穿,導致電流劇增,真正實現了高靈敏度的光探測。SPAD(Single Photon Avalanche Diode,單光子雪崩二極管)則是在APD的基礎上更進一步,直接施加反向電壓使其處于擊穿狀態,此時甚至只需要1個光子擊中二極管中的電子就能夠誘發大規模的雪崩擊穿,所以SPAD能夠實現單個光子的探測。由于SPAD的單光子探測功能,光電子大廠濱松也將其稱為SPPC(single pixel photon counter,單光子計數器)。
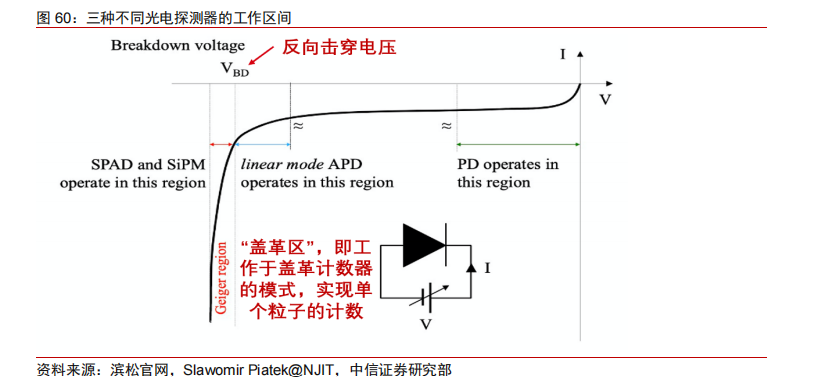
PD、APD、SPAD本質相同,只是工作于不同的反向電壓下,導致1個光子能夠激發出的電子數量不同,探測靈敏度也就隨之產生了極大的差距。
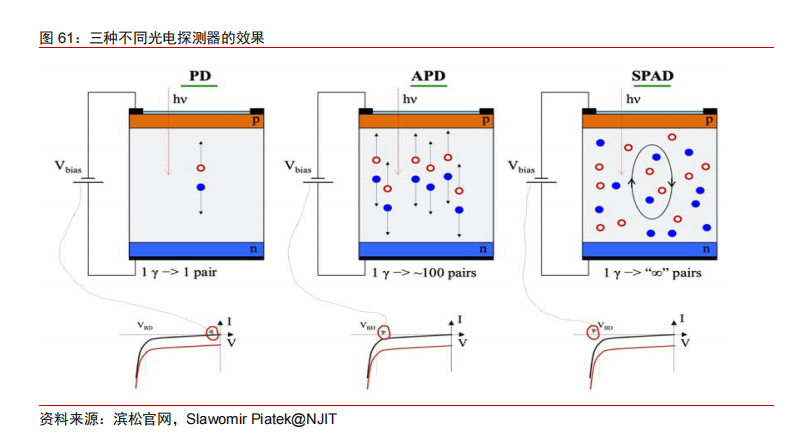
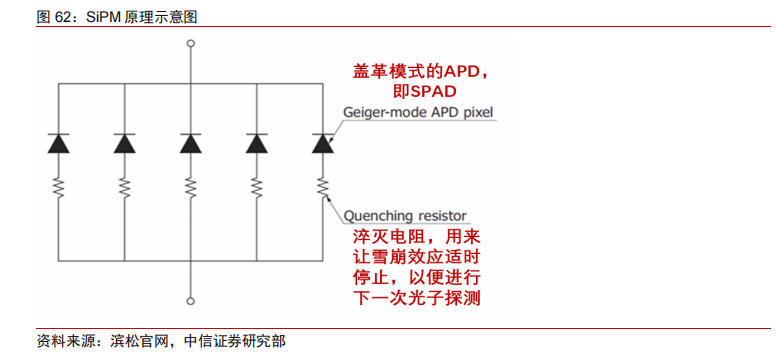
而SiPM(Silicon Photo-Multiplier,硅光電倍增管,濱松也稱為MPPC,多像素光子計數器)就是一組并聯的SPAD,用于彌補SPAD對光強感知能力不足的問題。由于SPAD只需1個光子就會發生雪崩,同時有100個光子入射和1個光子入射并不會帶來什么區別。為了解決這一問題,直接將大量SPAD并聯,通過發生雪崩的SPAD數量即可判斷光強。如今使用SPAD探測器的激光雷達通常都會直接使用SiPM,而不是單個的SPAD。
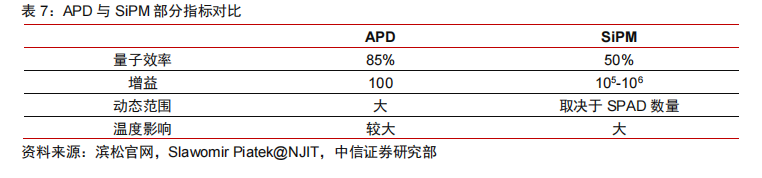
雖然SPAD靈敏度明顯高于APD,但接收端不是僅僅以靈敏度為標準,APD與SPAD各自有其應用場景,APD也具有高動態范圍、高量子效率(無用功更少)等優點。
APD:低成本高可靠仍有價值,1550路線需使用APD
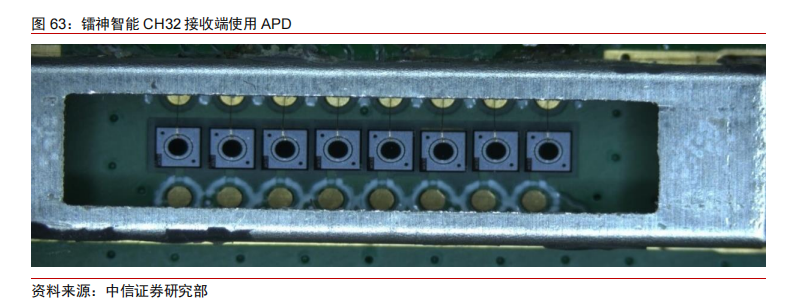
早期由于SPAD技術成熟度不足,激光雷達通常使用APD作為接收器。本次拆解的較早型號的鐳神CH32,其接收端芯片使用了一列APD。
目前APD與SiPM相比靈敏度上存在較大差距,因此在較新的追求探測距離的905路線激光雷達上已經出現了被替代的趨勢。但APD受自然光和環境溫度干擾程度更輕, 在強烈陽光等場景下也具有其價值。
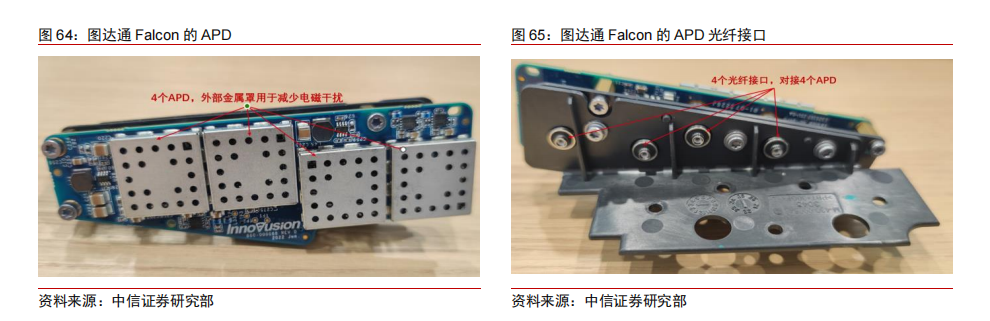
展望未來,APD一個較為確定的應用場景是1550路線的激光雷達。由于硅材料的限制,SiPM通常只能探測波長在1100nm以下的光子,對于1550nm的光子力有不逮。探測1550nm的光子通常需要InGaAs/InP系列材料,此類材料內部缺陷相對較多,如果制程SPAD,則其暗計數率(DCR,每秒在無光條件下由于材料內部熱載流子自行引發雪崩的次數)較高,所以通常采用APD。
目前在1550nmAPD領域,我國已有企業布局,例如芯思杰為鐳神智能開發陣列SPAD,也正在和國內其余頭部激光雷達在合作。
SPAD/ SiPM:905nm路線替代APD已成大勢,關注PDE與可靠性
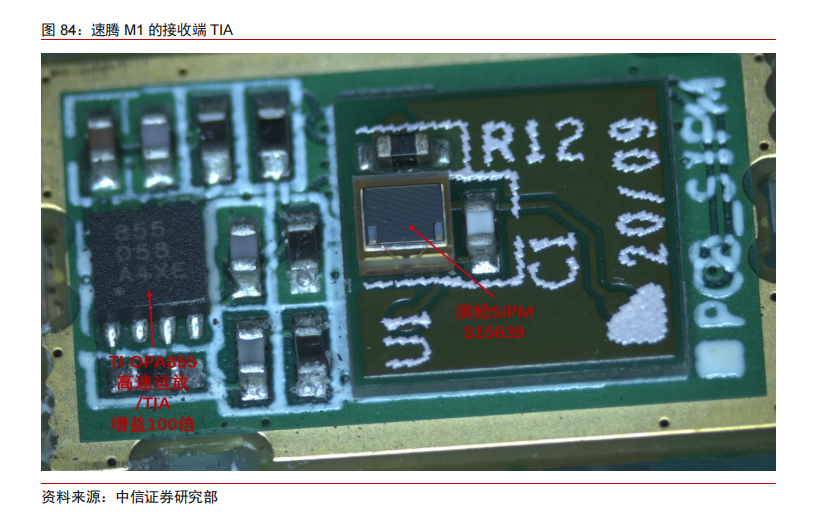
近年來SiPM技術成熟度日漸提高,其高靈敏度的特性已經得到業界充分認知,越來越多的激光雷達接收端開始采用SiPM。例如速騰M1的接收端就采用了濱松的SiPM。
SPAD/SiPM路線面臨的一個比較明顯的問題是自然光干擾,尤其是強烈日光的干擾。由于日光是連續譜,幾乎涵蓋了所有激光雷達的工作波長,所以僅靠濾光片是無法完全濾除陽光的,強烈的陽光入射會導致SiPM中多個SPAD單元飽和,并且在恢復初始狀態前都無法吸收光子,因而有可能漏掉真正的反射信號。
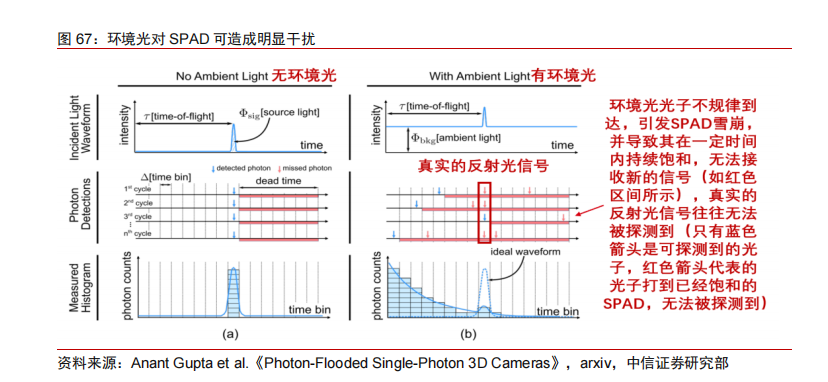
所以在強烈的日光下,使用SPAD/SiPM的激光雷達經常會出現探測距離明顯下降的 問題。雖然目前已有一些算法進行日光干擾的處理,但往往效果并不完美,有時還會引入額外噪聲,所以SPAD對自然光的處理仍然是一個難題。
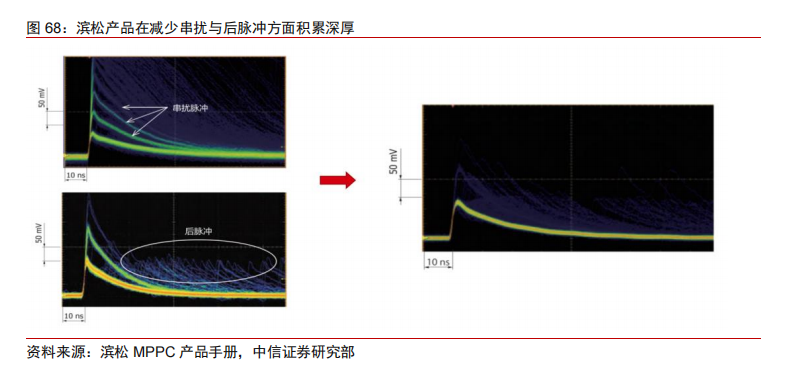
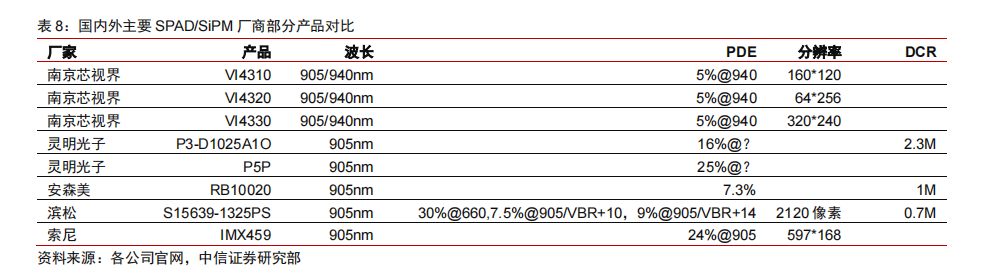
目前SPAD/SiPM領域主要被索尼和濱松占據,安森美也有一定份額。國際廠商在光子探測效率PDE(Photon Detection Efficiency)、可靠性(包括暗計數率DCR、后脈沖、串擾等)方面占據領先優勢,其中索尼在PDE和分辨率方面占據優勢,推出了100k像素的IMX459,而濱松在可靠性方面積累深厚,新產品串擾發生率只有前代的不到十分之一, 暗計數也實現了減半。
我國也有一些公司在SPAD/SiPM領域進行布局,例如南京芯視界、靈明光子、阜時科技等,但從數據上來看,在PDE和DCR指標方面都還有進步空間。
掃描端:轉鏡的核心壁壘在時序控制算法,MEMS 振鏡有較高難度
目前市面上主流的長距離激光雷達掃描方式為轉鏡類和 MEMS 類,我們預計在短期 內這一局面仍將持續。
轉鏡:簡單可靠,目前最容易通過車廠認證的路線
轉鏡是目前應用最廣的路線,包括禾賽、華為、圖達通、鐳神智能等大多數廠商都有 采用轉鏡路線的產品。轉鏡路線的核心要素是電機以及針對特定波長高反射率的鍍膜反射 鏡,通常轉鏡只需保證勻速旋轉即可,無需變速或其他特殊控制,整體難度不高。具體方 案上,轉鏡可以單獨工作,也可以搭配振鏡,或采用線光斑掃描等方式。我國市場上,鳴志電器、湘油泵等廠商得益于電機技術基礎,在轉鏡領域有一定儲備。
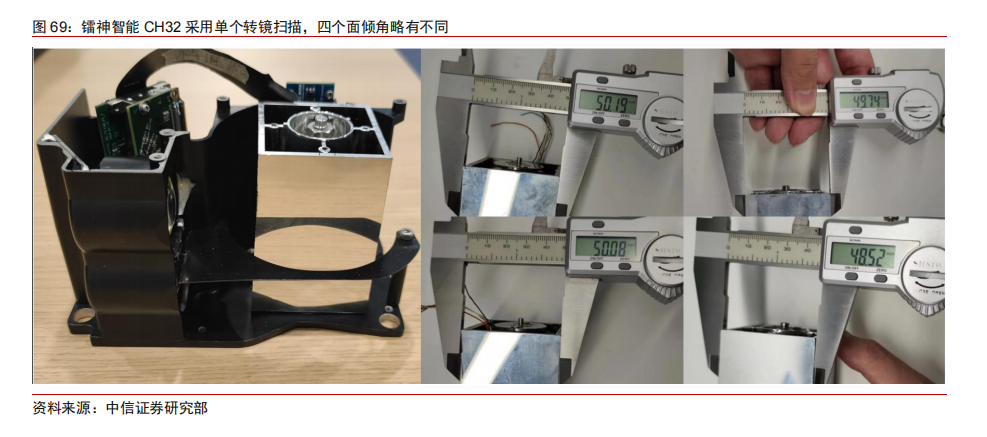
單一轉鏡:采用不規則棱鏡方式實現多線束掃描 單個轉鏡是最為簡單的方案,比如鐳神智能的 32 線轉鏡雷達,就是通過 8 個 EEL 激 光器和一個四面傾角略有不同的轉鏡來實現的 32 線掃描。從測量數據可見,其使用的轉 鏡底邊各個棱長略有不同,導致每一面并不是規整的矩形,四面鏡子存在大小不同的傾角。
轉鏡+振鏡掃描:改變振鏡轉速與激光器點頻制造 ROI
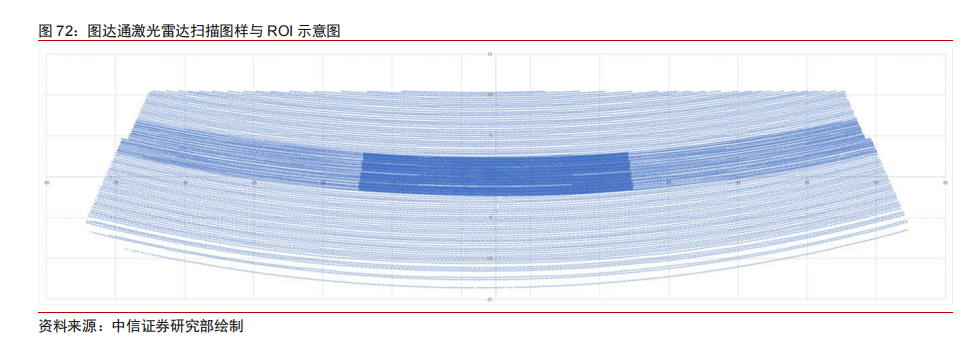
與單獨的轉鏡方案不同,轉鏡+振鏡方案靈活度較高,能夠支持 ROI 設計(密集掃描 重點關注區域,其他區域保持常規掃描頻率)。圖達通的 falcon 激光雷達采用的就是轉鏡+ 振鏡方案,轉鏡負責水平掃描,振鏡負責垂直掃描。
根據圖達通發布的專利《用于 LiDAR 系統的二維操縱系統》,光束從光源射出后打在 振鏡上,并被反射到轉鏡上,從轉鏡上反射到外界,再從被測物體處原路返回,回到接收 光路中。多個光源呈現略微不同的角度,同時向振鏡發光,即可實現多線掃描。實際中采 用的是光纖一分四,四線同時掃描。
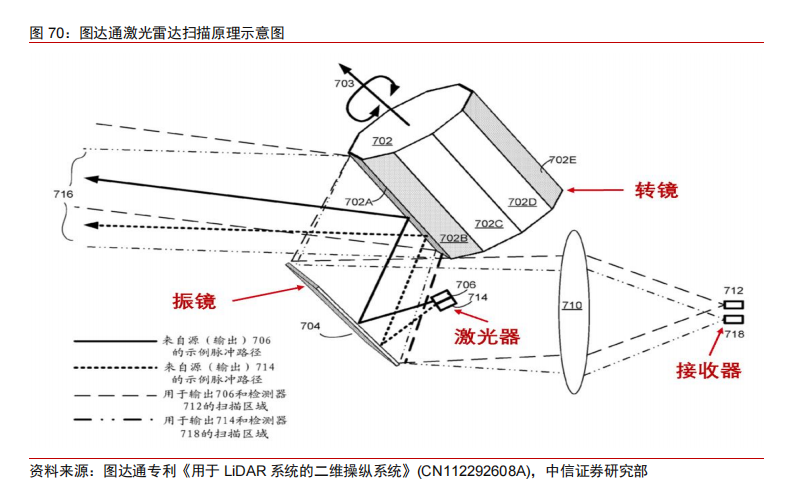
與專利中的不同在于實際的轉鏡采用的是五邊形,這與水平視場角有關,棱鏡棱數越 多水平視場角就越小,五邊形能夠達到其標稱的 120 度水平視場角。另外圖中收光透鏡處 呈現綠色是因為振鏡的倒影呈現在透鏡上,振鏡采用了增反膜來增強對 1550nm 光束的反 射率,所以呈現綠色。轉鏡上則有一層金屬膜增強反射率。

圖達通的此種設計的一大優勢在于能夠靈活調節 ROI。垂直方向上,可以設定振鏡在 某一角度區間內旋轉較慢,則對應的范圍內掃描點將會更密集。同時在一個特定的水平視 場角內也可以設定 ROI,這是通過改變激光器點頻來實現的,由于轉鏡的轉速是恒定不變 的,因此只需周期性提升激光器點頻。
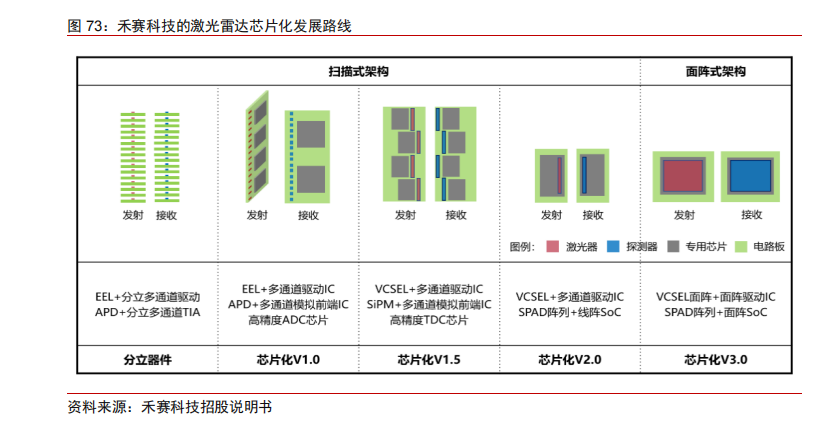
轉鏡+線光源:華為/禾賽的新路線
轉鏡與線光斑的組合是一種較新的組合。華為在其新款激光雷達上采用該路線,由 8 個半導體激光器充當光源,并經過光學器件的整型成為均勻的線光斑。根據禾賽科技招股 說明書,其芯片化 V1.5 方案與當前的 AT128 較為相似,而芯片化 V2.0 產品采用的是轉 鏡+線光源方案,意味著禾賽科技也有意向開發線光斑產品。
線光斑路線的優勢在于發射的是連續的線光斑,因此垂直方向的分辨率非常高,而且 如果需要進一步增加垂直分辨率,只需增加接收端的分辨率,無需增加激光器(發射端分 辨率約等于無限),升級成本更低。
線光斑路線的挑戰在于,一方面需要全新的光學設計和算法設計,另一方面線光斑要 求較大的出入光窗口,因此受到外界自然光的干擾也相對強烈一些。由于光路的可逆性, 點光源路線的激光雷達,只有與當前發射光線角度近乎完全相同的外界光線才能進入接收 端,而對線光源激光雷達而言,當前掃描到的一條豎線上的外界光線都可以進入接收端, 顯然干擾光的數量遠多于點光源路線。而且由于線光斑的能力更為均勻,也就更為分散, 因此接收端往往也需要使用更為靈敏的 SPAD/SiPM,受到陽光的干擾也就更為嚴重,會 出現強光下探測距離下降的情況。
MEMS 振鏡:尺寸較小,平衡性能與體積
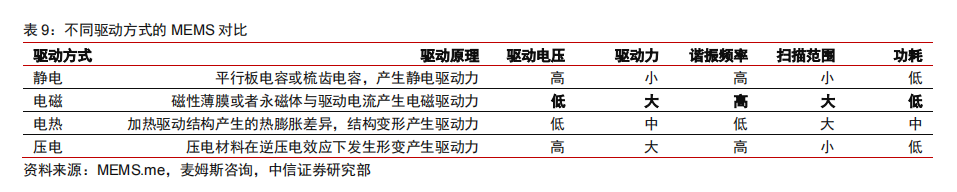
MEMS 振鏡是另一種主流路線,具備體積較小的優勢。按照驅動方式,MEMS 可以 分為靜電式、電磁式、電熱式、壓電式,但目前市面上主要只有靜電式和電磁式兩類,后 兩類屬于實驗室產品。在這兩類之中,電磁式無需高電壓驅動,無需升壓電路,而且驅動 力明顯大于靜電式(可以驅動更大的鏡片,使激光束可以始終完全擊中大幅擺動的鏡片), 掃描范圍也明顯更大,所以目前電磁式 MEMS 是激光雷達的主流。
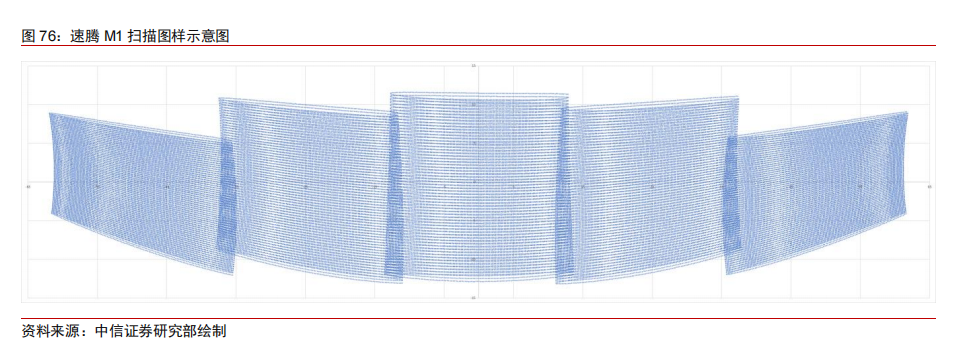
速騰 M1 是采用 MEMS 掃描模式的代表。其整機具備 5 個激光收發模組,與收發模組 一一對應的是 5 個固定反射鏡,這 5 個固定反射鏡將激光器的光束反射到中央的 MEMS 振鏡上,并隨著 MEMS 振鏡的不斷振動實現 5 條光束的同時掃描。
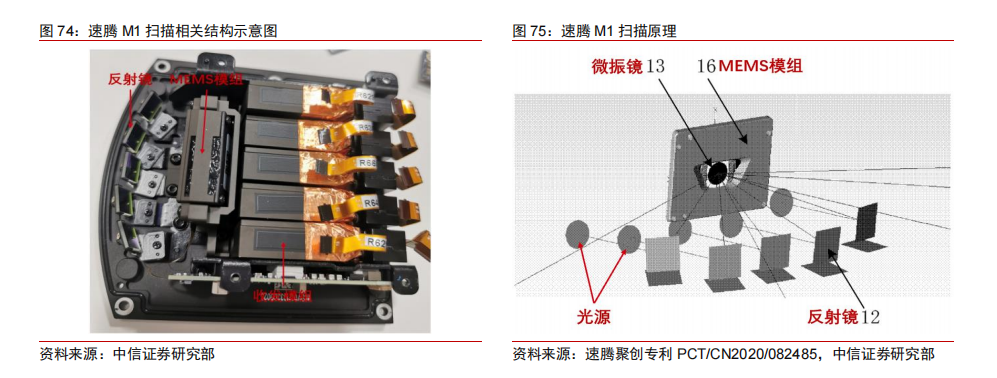
由于 MEMS 振鏡振動的角度范圍比較有限,通常只有 10 余度,帶動光線掃過的角度 也只有二十幾度,所以需要 5 個激光器各自負責 20 多度的一個扇區,拼合起來實現與轉 鏡路線相同的水平視場角。
拆開來看,速騰 M1 的 MEMS 模組后側是強力永磁體,長軸長度 7 毫米的振鏡靠極為 纖細的金屬絲(直徑僅有大約 0.1 毫米)固定在線圈上,線圈通電則能夠帶動振鏡振動。
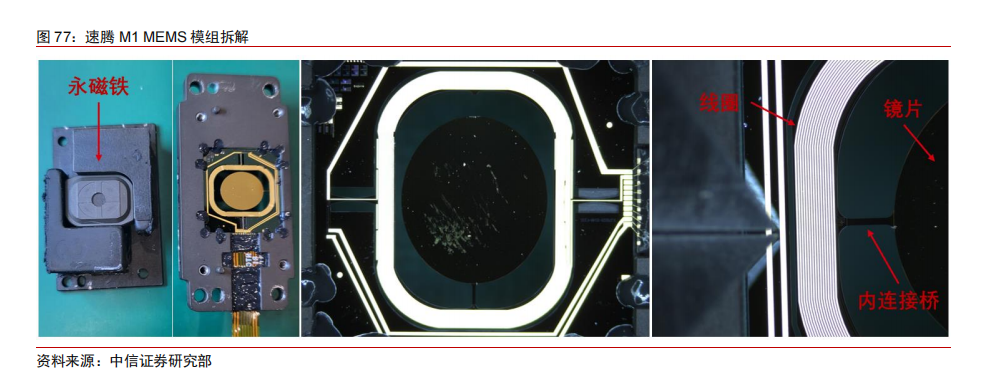
MEMS 領域,國內希景科技、英唐智控、知微傳感等公司都有產品發布。國際上諸如 濱松、Mirrorcle,以及被英飛凌收購的 innoluce 等都有產品發布,但濱松的產品直徑較小, 頻率較高,并非直接面向激光雷達場景,innoluce 產品也是小直徑高頻率的類型,Mirrorcle 則主要擅長靜電驅動型 MEMS。國內廠商中,希景科技是速騰的全資子公司,也是其產品 提供方,根據我們的現場測量,其產品長軸直徑達到 7 毫米,官網顯示其快軸頻率為 1.2-1.3kHz,抗 50 個 g 以上的沖擊,較為適合激光雷達的需求。
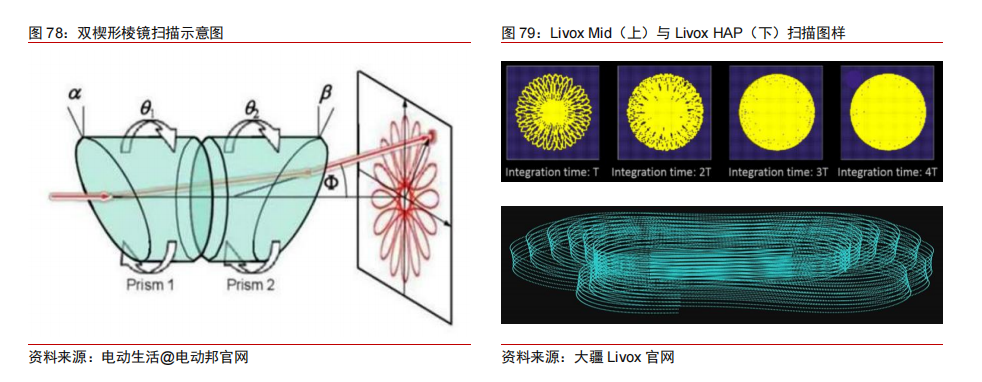
雙楔形棱鏡:低成本設計,最有利于低價的方案
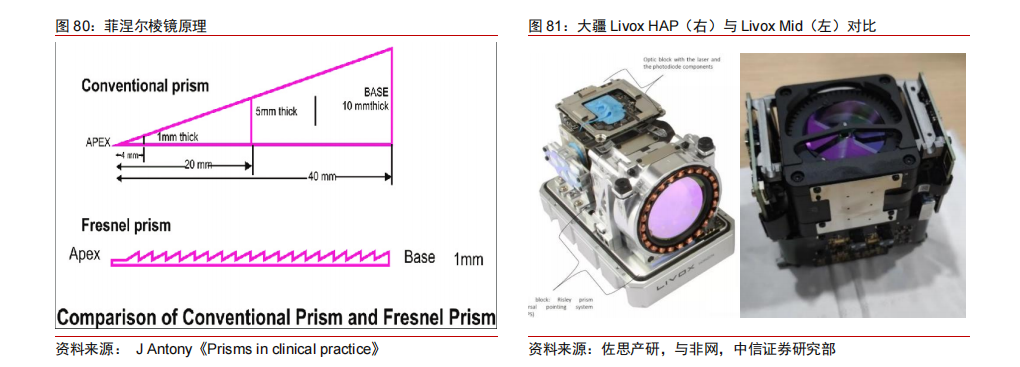
雙楔形棱鏡是大疆主要采用的掃描方案,其由兩塊同軸放置的楔形棱鏡組成,隨著兩 個棱鏡以不同速度旋轉,將在前方掃出類似菊花的圖樣,其原理類似萬花筒。這一方案最 大的優勢在于成本低、節約激光器和接收器,Livox Mid-40 官網售價僅 599 美金,而其最 大的劣勢在于幀率不足,外圈掃描點數不足。大疆新推出的高端車載產品 Livox HAP(官 網售價 1389/1599 美金)仍采用這一原理,不同點在于水平方向的掃描寬度明顯增加了。
在大疆的新款激光雷達上,雙楔形棱鏡原理仍然沒有改變,但不同在于,新款利用菲 涅爾原理,去掉了棱鏡上不發揮作用的部分,肉眼可見,新的棱鏡每一片都可以分成兩截, 實現了減重以及體積收縮,更適合汽車場景。
信號處理:LD 驅動與 TIA 屬必需品,FPGA 主要進行時序控制和算法
與信號相關的部件主要包括激光驅動芯片、跨阻放大器(用來將光電傳感器的電流放 大成較大的電壓)、ADC/TDC、FPGA 等。在這些領域,國內相關標的較少,但其仍然具 備相當的價值量,也為我國半導體產業升級提供了市場空間。
LD Driver:越快越好,最大化利用瞬時功率的選擇 LD Driver 即激光器驅動芯片,它負責在接收到主控芯片的“發光”指令后,給激光 器產生一個具體的控制信號。對于這個控制信號的主要要求就是足夠快,有足夠陡峭的上 升沿。通常在低速信號電路中,信號從 0 變成 1 可以看成是瞬間完成的,但在高速電路中, 從 0 跳到 1 的時間消耗就無法忽略了,所謂上升沿指的就是這個從 0 到 1 的過程,反之下 降沿就是從 1 到 0 的過程。
為什么對上升沿有較高要求?如前文所屬,激光雷達功率上限受到人眼約束,然而與 探測相關的主要是瞬時功率,因此如果能夠將瞬時功率做高,同時讓發光時間變短,那么 就能夠提高探測距離。同時,縮短發光脈沖時間對于提高激光器點頻也有所幫助。因此, 盡可能縮短上升沿和下降沿時間就成為了有必要的選擇。
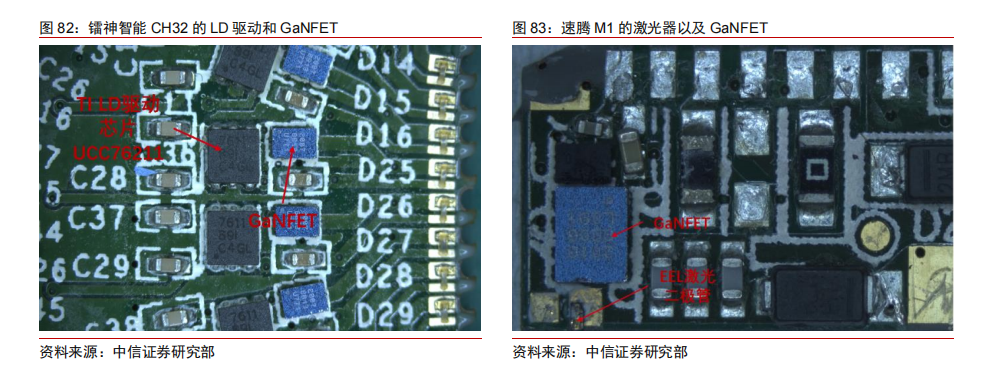
同時激光器要達到高功率短脈沖,不僅需要快速的 LD 驅動,還需要一個能夠快速響 應 LD 驅動的大功率電流源,通常是一個 GaNFET。
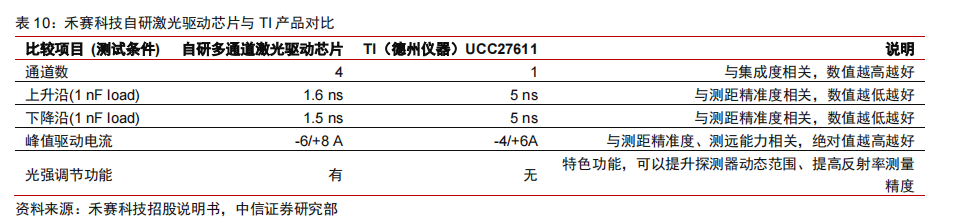
根據禾賽科技招股說明書,其自研的激光驅動芯片實現了超快上升沿和下降沿,且單 芯片能夠驅動 4個通道(也就是 1個 LD驅動芯片可以配合 4個 GaNFET 和 4個 LD使用), 性能較為優秀。
TIA:高速運放,SiPM 仍需使用
在接收端,APD 或 SiPM 接收到光子后產生電流,理論上通過這個電流即可獲知光強, 然而實際上盡管反射光信號已經經過了 SiPM 或 APD 的放大,卻仍然較小,通常需要再次 放大。而且光電傳感器輸出的是電流信號,不利于與數字電路相融合,如果將其轉化為電 壓信號,則一方面方便數字電路處理,另一方面也能夠減小功耗。完成放大和電流轉電壓 (“跨阻抗”或“跨阻”的由來)任務的就是跨阻放大器 TIA(trans impedance amplifier), 屬于高速運放的一種。
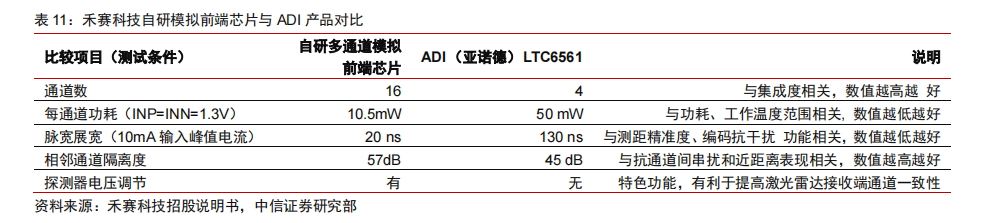
目前高速運放領域主要被 TI、ADI 等國外廠商占據,但國內激光雷達廠商表現出一些 自研的趨勢,例如鐳神智能與禾賽科技等公司都在自研 TIA。根據禾賽科技招股說明書, 其自研的 TIA 在通道數、功耗、展寬、通道隔離度方面都比 ADI 的產品占據優勢。
TDC、ADC:TDC 適合低成本場景,ADC 支持更精密測量
由于反射光以及光電探測器通常輸出的都是模擬信號,往往需要將其轉化成數字信號 才便于核心處理器進行處理及運行后續的算法。
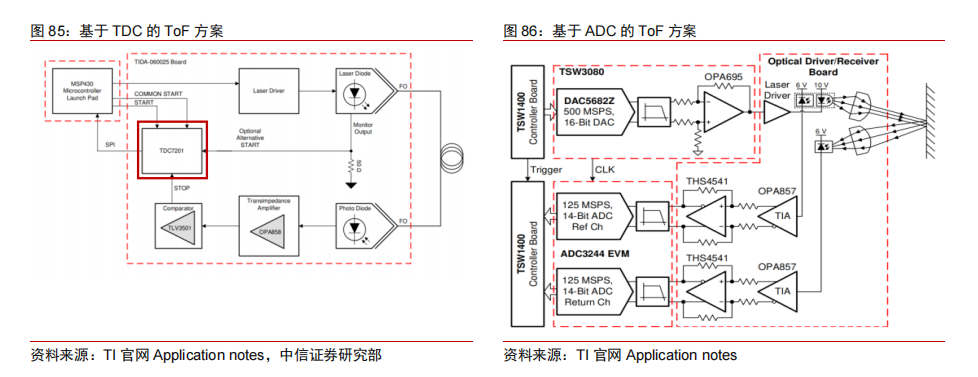
TDC(時間數字轉換器)主要發揮計時器功能,通常用于低功耗、低成本、環境簡單 的系統(如左下圖 85),此時只 TDC 需要連接到主控芯片(通常 MCU 即可)和光接收器 之間,當主控芯片發出發光信號時,也同步給 TDC 一個開始計時的信號,隨后反射回來 的光經過 TIA 轉換成放大的電壓,再經過比較器與參考電壓比較,判斷是否有光入射,TDC 則將比較器的輸出當做結束信號,完成計時,并將時間信息送回主控芯片。
ADC 通常用于更復雜的系統(如右下圖 86),ADC 對反射光信號進行持續采樣,轉 換成數字信號,并由控制芯片進行波形處理、計時等工作。
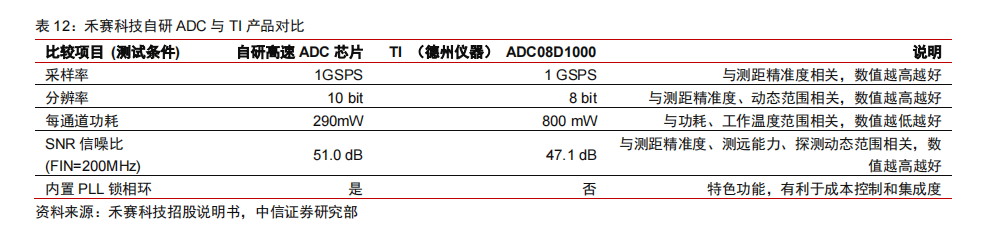
目前高速 ADC 主要由國外廠商生產,但國產也有望在未來進行替代。根據禾賽科技 招股說明書,其自研的高速 ADC 芯片性能超越 TI 的同類產品,在采樣率不變的前提下, 分辨率、功耗、信噪比都有改善,并且還內置了 PLL 鎖相環。
FPGA 通常在激光雷達中充當主控芯片。為什么不采用 CPU 作為主控?因為激光雷 達需要進行大量的信號處理、電機時序控制等,CPU 雖然也能做,但如果采用專用的算法 以及為算法專門優化設計的電路,其效率會高得多。而作為汽車領域的新生事物,從 2007 年 Velodyne 激光雷達首次被用于 DARPA 挑戰賽至今,其上車的歷史也不過十五年,還 有許多硬件/算法設計尚處在探索階段,因此采用 FPGA 有利于反復迭代修改,同時還滿 足了專用電路的高效性。
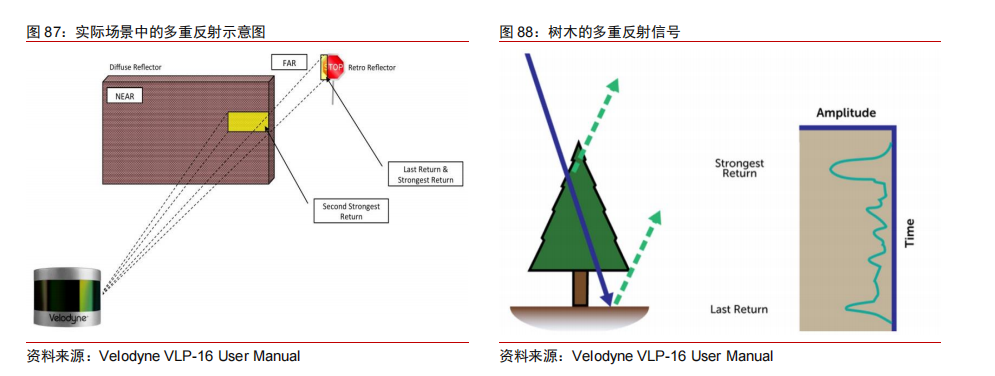
舉例來說,僅僅反射波的波形處理就需要消耗大量算力,而且每一束反射光都需要進 行處理,使用 CPU 既難以滿足算力需求,又浪費 CPU 的通用能力,因此往往需要專門的 電路進行處理。波形需要什么處理?實際中的情形比理論中復雜許多,雖然發射端發射的 是一個短促的脈沖,但由于光束的擴散,飛行過程中會遇到多個障礙物,產生多個反射波。如果是樹木等物體,其反射波將更復雜(如右下圖 88 所示,反射波是一長串連續波)。在此情況下,我們如何判斷反射光的返回時間,如何判斷反射率,都需要算法處理。
目前全球最主要的兩大 FPGA 廠家是 AMD 收購的 Xilinx,Intel 收購的 Altera,還有 Lattice 等規模稍小的廠商。大疆 Livox HAP 采用的就是 Xilinx 的 FPGA。

國內紫光國微等公司具備 FPGA 生產能力,但產品性能與國際主流尚有一定差距。
-
元器件
+關注
關注
112文章
4692瀏覽量
92012 -
光纖激光器
+關注
關注
12文章
177瀏覽量
20035 -
激光雷達
+關注
關注
967文章
3939瀏覽量
189599
原文標題:拆了5款激光雷達后,我摸清了里面的元器件!
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論