") 高精度GNSS定位定向模組M20D實現(xiàn)無人配送車導航定位的原理
高精度GNSS定位定向模組M20D實現(xiàn)無人配送車導航定位的原理
高精度GNSS定位定向模組M20D結合了全球導航衛(wèi)星系統(tǒng)(GNSS,如北斗、GPS)和慣性測量單元(IMU)的技術,以實現(xiàn)無人配送車的導航和定位。下面是M20模組實現(xiàn)無人配送車導航定位的原理:
GNSS定位: GNSS是衛(wèi)星導航系統(tǒng),通過接收來自多顆衛(wèi)星的信號,可以計算出接收器的位置、速度和時間。M20D模組使用GNSS接收器來獲取衛(wèi)星信號,并利用信號的時間延遲來計算車輛的位置。由于GNSS信號可能受到建筑物、樹木和其他障礙物的干擾,因此在復雜環(huán)境中,單獨使用GNSS定位可能會出現(xiàn)誤差。
慣性測量單元(IMU): IMU由加速度計和陀螺儀組成,用于測量車輛的線性加速度和角速度。通過積分這些測量值,可以估計車輛的位置、方向和速度變化。然而,IMU在長時間使用過程中會存在累積誤差,因此單獨使用IMU進行定位可能會導致位置漂移。
融合算法: M20D模組通過使用傳感器融合算法將GNSS和IMU的數(shù)據(jù)進行整合,以獲得更精確和穩(wěn)定的定位和導航信息。這些算法可以校正GNSS信號的誤差,同時通過IMU的數(shù)據(jù)來減少定位漂移。常見的融合算法包括卡爾曼濾波和擴展卡爾曼濾波等。
精度提升: GNSS信號在城市峽谷、高樓大廈等環(huán)境中可能受到多徑效應的影響,從而引起定位誤差。M20D模組可能會使用差分GPS或RTK(實時運動定位)技術,以及地面基站的參考信號,來進一步提升定位精度。
綜合上述步驟,M20D模組利用GNSS和IMU數(shù)據(jù)的融合,通過校正和補償兩者各自的誤差,可以實現(xiàn)無人配送車的高精度導航和定位。這種雙重技術的組合能夠在信號受限或復雜環(huán)境中提供穩(wěn)定的導航性能,從而確保無人配送車能夠準確、安全地完成任務。
M20D高精度定位定向模組特點
22nm制程GNSS SOC芯片Alice
內置深耦合組合導航算法引擎*
支持DR推算,精度0.8% (1km/2min)*
雙天線雙頻GNSS(1507個通道)
》支持NRTK/PPP-RTK
抗干擾、抗欺騙
》AEC-Q104*
%150 26262 A5IL B
M20D高精度定位定向模組技術優(yōu)勢
內置高精度雙頻GNSS定位引警
深圳市晶立弘泰電子科技(https://www.jlht168.com)的高精度定位定向模組M20D是采用bynav REAL(Ransac Enhanced Advanced Location)GNSS定位引擎,內置完好性監(jiān)測和部分模糊度解算算法,提高了城市環(huán)境中多徑、干擾條件下的容錯率和固定成功率,定位解算結果更加穩(wěn)健。針對城市環(huán)境中多徑、干擾等引起的觀測值異常,集成了完好性監(jiān)測和部分模糊度解算算法。該算法可以實時對偽距、載波相位、多普勒觀測值進行監(jiān)測,在異常衛(wèi)星較多的情況下仍可以準確剔除故障衛(wèi)星,提高了容錯率和固定成功率,定位解算結果更加穩(wěn)健。
RTK高性能抗干擾、抗欺騙GNSS測量與定位引警
內置SAIF (SmartAdvanced nterferencedeFense)高性能復合于擾抑制技術,性能卓越(65dBc),支持掃頻、單頻、多音、窄帶、脈沖等多種干擾樣式的抗干擾處理,對常見干擾信號如車載防跟蹤設備、雷達/機場信號塔等,進行高量化位數(shù)的信號預處理與干擾抑制,大幅提升車載場景下高精度定位可用性與完好性。
支持NRTK/PPP/PPP-RTK
支持全部NRTK差分服務,且支持北斗三號B2b PPP解算,支持主流PPP-RTK差分服務。充分利用北斗與GPS、伽利略多頻信號,大幅提升PPP收斂速度,提升高精度定位可用性。
支持ASIL B功能安全等級
基于IS026262 ASIL B功能安全設計,選配功能安全IMU,內置功能安全GNSS芯片 (bynavAlice芯片,基于功能安全要求進行了全新的架構設計)及功能安全算法。可為智能汽車、自動駕駛等提供具備系統(tǒng)級功能安全的高精度定位定向。
內置深耦合組合導航算法,支持DR推算*
內置MEMS慣性測量單元,可實現(xiàn)DR推算,在通過短暫遮擋場景中仍可保持高精度位置速度的輸出。基于bynav ALice芯片的深耦合組合導航算法,可提高GNSS信號觀測質量。
深圳市晶立弘泰電子科技M20D模組基于北云科技新一代22nm制程高性能車規(guī)級GNSS SOC芯片Alice,48pin LGA封裝,內置高精度測量引擎、導航引擎、MEMS慣性測量單元*以及功能安全處理器,符合ASILB功能安全等級”,支持高性能RTK解算、DR推算"、抗干擾、抗欺騙等功能,能夠有效地應對短暫衛(wèi)星信號干擾、丟失等苛刻環(huán)境,提供連續(xù)、實時、可信的高精度位置與姿態(tài)信息,具有高集成度、高性能、低功耗、小尺寸等特點,可應用于自動駕駛、高級駕駛輔助、車道級導航.無人機、智能機器人、精準農(nóng)業(yè)、測量測繪等領域.

M20D高精度組合導航模組主要特點包括:
1. 高靈敏度和高精度:采用多模GNSS芯片,同時支持北斗、GPS和GLONASS等多個衛(wèi)星系統(tǒng),精度可達厘米級和亞米級。
2. 多種定位模式:支持單點定位、差分定位和RTK(實時動態(tài)定位)技術,可按需選擇不同的定位模式。
3. 小尺寸、低功耗:模組尺寸小,適用于應用場景廣泛的嵌入式設備,并具有低功耗、高可靠性等優(yōu)點。
4. 防震抗干擾:具有優(yōu)秀的抗震性能和抗干擾能力,適用于各種惡劣的環(huán)境條件。
北斗高精準定位模組可以應用于航空、航天、地質、環(huán)境、氣象、災害監(jiān)測和預警等領域,支持各類定制化解決方案,并有廣泛的應用前景。
規(guī)格指標
系統(tǒng)
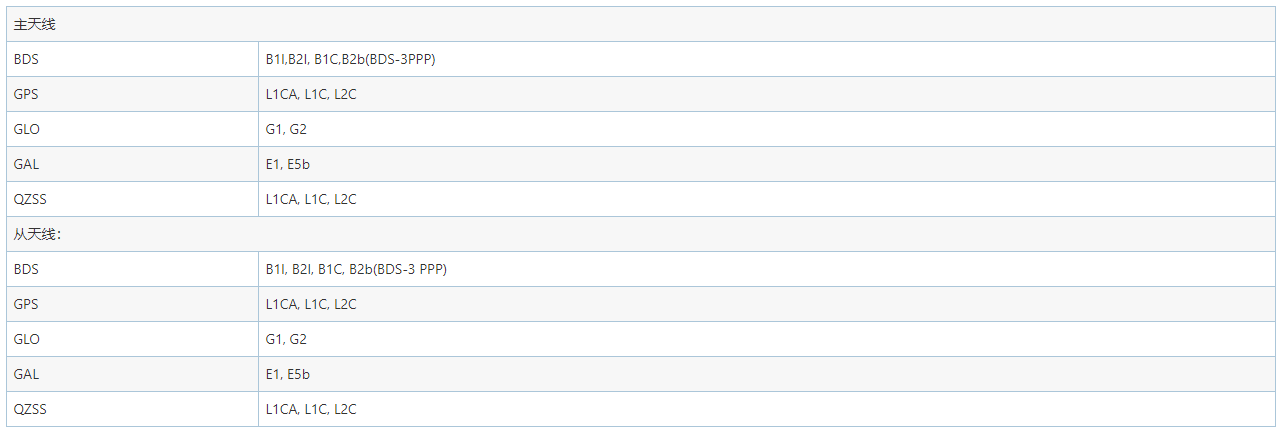
全系統(tǒng):GPS、BDS、GLO、GAL、QZSS、IRNSS
通道數(shù)
1507 通道( 含750FuSa 通道)
信號跟蹤
DR推算精度* 6

水平定位精度(RMS)

高程定位精度(RMS)

定向精度(RMS) 0.1° /1m 基線
最大數(shù)據(jù)速率

首次定位時間

組合解算延遲

對外接口

物理和電氣

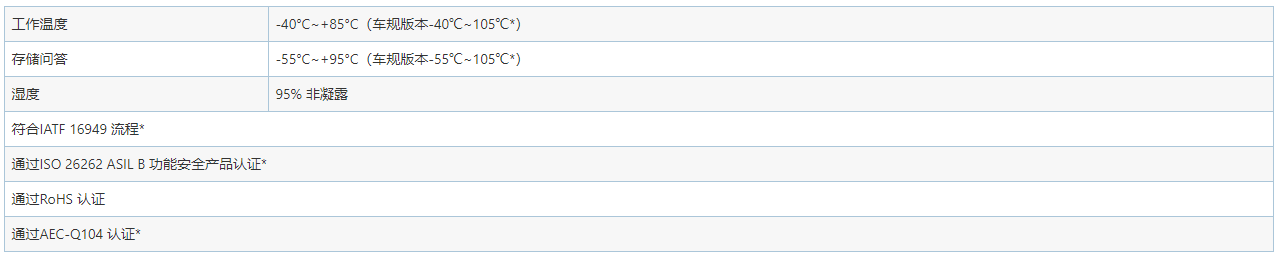
環(huán)境及其他
型號及功能
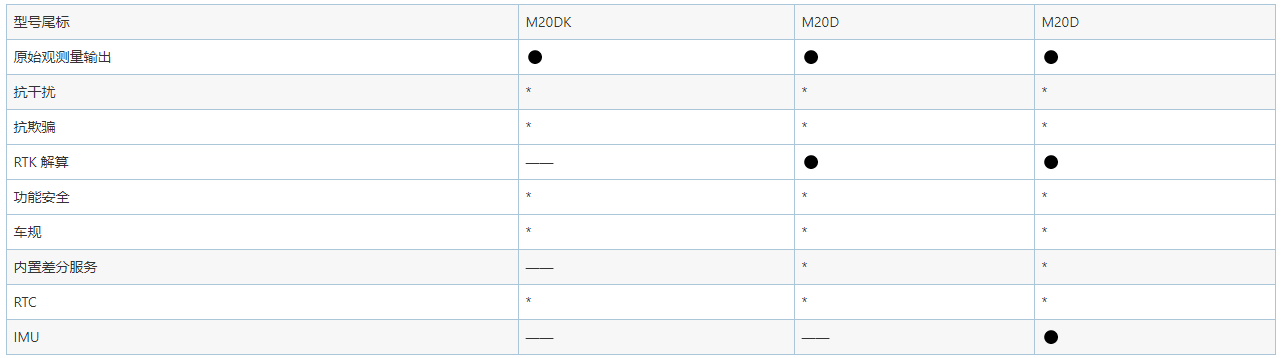
抗干擾功能
? 抗欺騙功能 ? 功能安全 ? 車規(guī) ? 內置差分服務 ? RTC 上述功能均為選配
備注:
1. 典型值。性能規(guī)格受制于GNSS系統(tǒng)特性,衛(wèi)星幾何分布,基線長度,多徑效應和干擾;
2. 典型值。無歷書或星歷,沒有概略位置或時間;
3. 典型值。保存歷書和最近星歷且已知大概位置和時間;
4. 授時功能可選,精度不包括由于 RF 或天線帶來的零值;
5. 典型值。不含天線饋電與外接設備功耗;
6. 接里程計,使用車載模型;
7. 使用高速通信接口。
審核編輯 黃宇
-
定位
+關注
關注
5文章
1247瀏覽量
35232 -
GNSS
+關注
關注
9文章
717瀏覽量
47624
發(fā)布評論請先 登錄
相關推薦
基于ST第五代高精度定位芯片的車載定位P-BOX方案

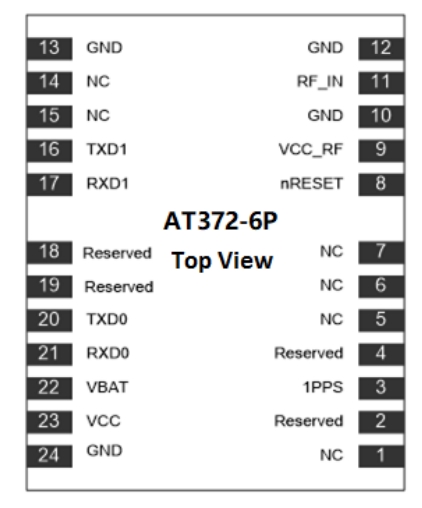
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet
AMEYA360:芯訊通全新發(fā)布超低功耗GNSS定位模組SIM66D-R
室外定位:高精度北斗RTK定位技術
移遠通信高精度定位模組LG290P實現(xiàn)批量交付
芯訊通發(fā)布高精度GNSS定位模組SIM66D-R
移遠通信推出“全系統(tǒng)+全頻段”高精度GNSS定位模組LG290P
移遠通信推出工規(guī)級RTK高精度GNSS定位模組LG290P
移遠通信推出“全系統(tǒng)+全頻段”GNSS定位模組LG290P,賦能高精度導航應用
移遠通信推出“全系統(tǒng)+全頻段”高精度GNSS定位模組LG290P,賦能高精度定位應用

移遠通信推出“全系統(tǒng)+全頻段”GNSS定位模組LG290P,賦能高精度導航應用

高精度定位設備的精準定位功能

關于直線電機模組分辨率、定位精度和重復定位精度淺談
GNSS定位導航原理詳解
如何實現(xiàn)厘米級高度定位





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論